可替换式单关节机器人柔性手部的研究
2013-03-17张立军赵永瑞相恒富
张立军,赵永瑞,相恒富
(中国石油大学(华东)机电工程学院,山东青岛266580)
机器人由于延伸和扩大了人的手足和大脑的功能,因此可以代替人从事危险、有害、有毒、低温和高热等恶劣环境下的工作。工业机器人结构中最重要的执行机构是手部[1-3]。手部,也叫末端执行器,是装在机器人手腕上直接抓握工件或执行作业的部件,由手指、传动机构、驱动装置和支架组成,如图1所示。然而现有的搬运或码垛类机器人手部存在结构较为单一、材料利用率不高及适用范围较小等问题,很难采用一套主结构实现对不同形状和不同尺寸工件的可靠夹持。为此,作者提出将机器人手部设计成可替换形式,并将机器人结构中手指和连杆之间做成燕尾槽接口连接。该机构不但能节约材料,节省更换时间,增加效率,而且制造也容易。
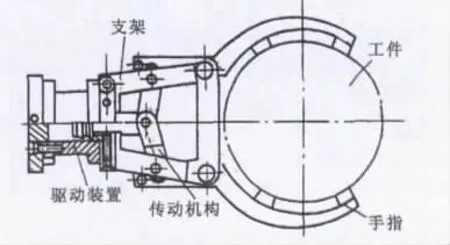
图1 夹钳式机器人手部的构成
1 机器人手部的组成及工作原理
该可替换式单关节机器人柔性手部主要由液压缸、固定支架、连杆、(可替换式)手指等组成。图2 是柔性手部的结构示意图,图3 是柔性手部及其手指的三维示意图。

图2 柔性手部的结构示意图
在图2 中,以夹持圆柱形物体的机械手为例。该机械手设计是采用两个手指,手指是直接与工件接触的部件。手指松开和夹紧工件,是通过手指的张开与闭合来实现的。当安装在固定支架上的液压缸驱动活塞杆向上运动时,活塞杆拉动圆柱销和连杆使手指闭合,从而夹紧工件;当液压缸驱动使活塞杆向下运动时,活塞杆拉动圆柱销和连杆使手指张开,从而松弛工件。机器人手指的更换主要通过连接处的燕尾槽连接,因此在设计手指时只需为其设计相应的燕尾槽接口即可方便更换手指,以满足对不同形状工件的夹持要求,节省更换时间,增加工作效率。同时可根据不同工件的形状要求,及时设计并制作出相应的手指进行更换,以满足高效生产要求。

图3 柔性手部及及其手指的三维示意图
图3 中,通过改变机器人手指的形状来满足不同工件的夹持要求,主要设计了3 种夹持方案:第一种是球体夹持手指,所采用的是手指2,可以完成生产过程中对球体类工件的夹持任务;第二种是立方体夹持手指,所采用的是手指3,以完成对立方体类工件的夹持任务;第三种是圆柱体夹持手指,所采用的是手指1,用来完成对圆柱体类工件的夹持任务。
该机构采用液压缸驱动,只要通过控制液压缸活塞杆的行程,即可根据不同形状工件的夹紧力需求设置合适的活塞杆行程,进而控制夹持装置的开合状态,以提供不同的夹紧力来满足对工件的夹持要求。
2 机器人手部夹紧力的计算
假定机器人手部最大抓取质量为50 kg,其夹角为φ 为45°。根据工作位置和工作环境的需要,结构状态如图4所示,a=150 mm,b=153 mm。

图4 机器人手部相关尺寸图
手部夹持装置采用碳钢制造,其摩擦因数取μ =0.16,重力加速度g =9.8 N/kg,夹紧时由力学关系可以得到公式:2F×μ=mg,进而得到夹紧力


根据夹紧力及驱动力计算结果,选择驱动装置的驱动力为3 123.75 N。
3 机器人手部中连杆的应力分析
机器人手部结构中连杆是比较重要的部件,它一方面传递夹紧力,另一方面还起着支撑与平衡某些零部件的作用,因此对设计后的连杆进行应力分析是十分必要的。采用SolidWorks 软件建立连杆组件(包含相应的连接件)的三维模型,并对连杆组件进行有限元数值分析,得到的结果如图5所示。

图5 连杆应力分析图
由图5 可知:在现有连杆尺寸下,连杆的强度符合设计要求。
4 结论
(1)机器人手部结构中手指与连杆之间采用燕尾槽连接方式,连杆上燕尾槽的尺寸是固定的,不同形状与尺寸的手指时只需具有相匹配的燕尾槽接口就能方便更换,以满足对不同工件的夹持要求。
(2)主要设计了3 种夹持方案:第一种是球体夹持手指,可以满足生产过程中对球体类工件的夹持任务的要求;第二种是立方体夹持手指,以完成对立方体类工件的夹持任务;第三种是圆柱体类夹持手指,用来完成对圆柱体类工件的夹持任务。
(3)经验证:在现有连杆尺寸下,连杆的强度符合设计要求。
【1】李云江.机器人概论[M].北京:机械工业出版社,2011.
【2】刘极峰,易际明.机器人技术基础[M].北京:高等教育出版社,2006.
【3】李团结.机器人技术[M].北京:电子工业出版社,2009.
【4】张玉茹,李继婷,李剑锋.机器人灵巧手——建模、规划与仿真[M].北京:机械工业出版社,2007.
【5】王立权,陈东良,陈凯云.机器人创新设计与制作[M].北京:清华大学出版社,2007.
【6】杨亮.空间机器人抓获手抓的研究[D].北京:北京邮电大学,2008.
【7】熊有伦.机器人技术基础[M].武汉:华中理工大学出版社,1996.
