连续输送物料计量称重系统的设计
2013-03-11李永伟朱婧菲刘占阳孙海波
李永伟,朱婧菲,刘占阳,孙海波
(1.河北科技大学电气工程学院,河北石家庄 050018;2.河北省机电一体化中试基地,河北石家庄050081)
计量称重与人类生产、生活息息相关,在工农业生产、仓储和产品流通等环节中,很多场合需要对连续输送散装物料进行计量称重,如饲料加工、粮食加工、化工、冶金、医药等行业的贸易结算或企业散装物料入库、出库以及上下工序间工艺控制用计量称重,都需要对连续输送的物料进行精确快速计量称重。传统的计量称重系统是在传送带中间嵌入皮带秤计量物料的流量,间接计算出连续输送物料的总量,这种计量方式其计量精度受传送带运行状况的影响较大,精度一般在2%左右,且不稳定,达不到贸易结算的要求。采用一边加料一边动态称重的传统计量系统,称量过程受到加料冲击和振动等影响,其计量称重精度也很难达到贸易结算的要求。要提高连续输送物料的计量精度,最有效的方法是采用静态计量,即物料处于静止状态时进行计量称重,但物料在连续输送过程中很难满足静止状态计量要求。本文设计的连续输送物料计量称重系统是基于动态称重方法,采用物料流的动态切换和双称量斗互备缓冲的计量方式[1-2],计量精度高于0.5%,可作为贸易结算等用途的计量,解决了连续输送的散装物料的精确计量和快速称重的难题[3]。
1 系统组成和工作原理
1.1 系统组成
连续输送物料计量称重系统主要由机械系统、称重系统和自动控制系统组成[4],整个系统安装在一个方形的箱体内,系统结构图见图1。系统包括左、右2个计量斗、6只称重传感器、2套称重仪表、物料流切换装置、计量斗放料闸门、驱动闸门切换的气缸、电磁阀、气源部件、控制面板及自动控制系统等组成。
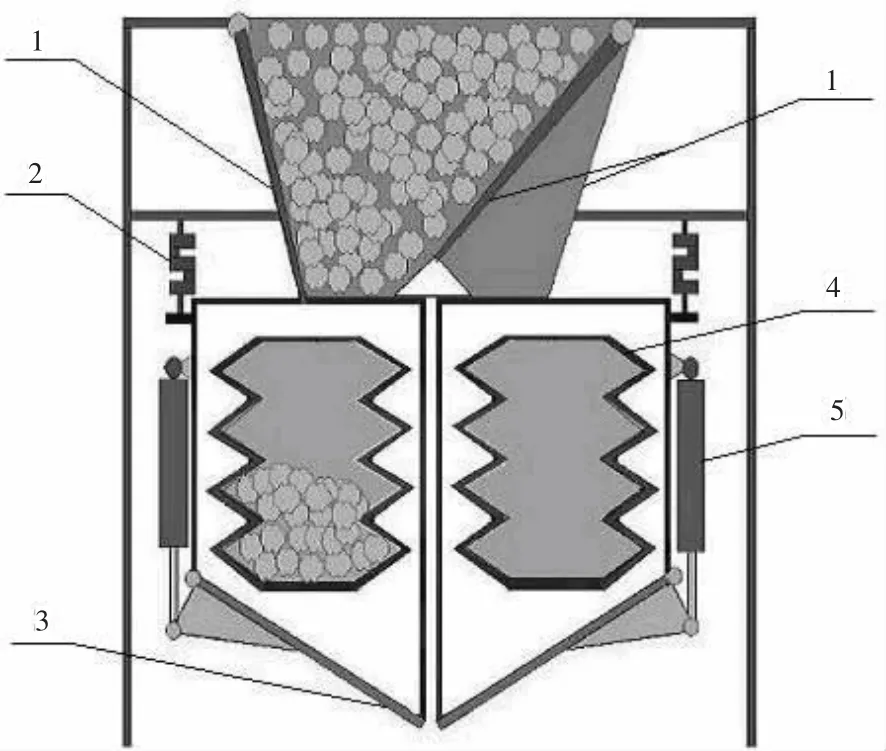
图1 连续输送物料计量称重系统结构图Fig.1 Diagram of measuring and weighing system of continuous conveyed materials
1.2 工作原理
在开始计量时,通过物料流切换装置使左计量斗处于进料状态,右计量斗处于进料等待状态,左计量斗进料完成后进入计量称重状态,同时右计量斗进入进料状态,以保障进料的连续性。左计量斗计量称重完成后由气缸控制放料闸门快速放料,放料完毕立即转入进料等待状态。右计量斗进料完成后转为计量称重状态,左计量斗再次转为进料状态,如此循环往复,通过多次循环完成整个计量称重任务。在计量称重过程中,始终要有一个计量斗处于进料状态,以保证精确计量和物料连续输送的统一。
2 控制系统及其硬件设计
2.1 物料流转换时序设计
连续输送物料计量称重系统的关键是以2套互为备份的称量装置在计量和进料、放料等过程中进行合理切换[5-7],使得2套称量装置保持有一套装置处于进料状态,另一套装置处于计量或计量辅助状态,以确保物料流的连续性和计量的准确性[8]。物料流切换和2套称量装置的状态转换时序设计,要保证一套装置的计量时间和放料时间之和小于另一套装置的最长进料时间,否则,处于进料状态的进料斗已满,处于计量状态的计量斗还没有完成计量或放料,则无法切换到进料状态,物料流的连续性就不能保证。最长进料时间由可计量的最大流量和计量斗有效容积决定,称量时间决定于计量时稳定延时时间,计量斗放料时间决定于放料口截面积和物料下落速度[9]。各个环节的时序应符合以下关系:

式中:Q为最大计量流量;VP为一个计量斗有效容积物料密度;T1为物料流切换装置的动作时间;T2为计量前的稳定时间;T3为计量采样时间;T4为放料时间。为此,应当首先确定T1和T4,然后根据式(1)反算所需计量斗容积,但计量斗容积又会影响放料时间T4,而T4与每次计量物料质量之间没有对应的计算方法,一般通过实验测定[10]。因此,时序确定是一个需要多次反复实验和验证的过程。
2.2 物料流切换装置设计
物料流切换功能是实现互备缓冲计量的前提,为了简化结构,切换装置利用物料在重力作用下自流来实现切换[11],不使用机械和动力。可能的切换方式有单导向板或双导向板结构,有上转轴和下转轴方式。本设计综合切换速度、所需驱动行程和驱动力大小等因素,选择双导向板转轴上置方案。
2.3 硬件选型及设计
计量斗称重传感器的选型与布置的合理性直接影响计量精度,称重传感器可选用拉式传感器或压式传感器[12],计量斗称重传感器的数量可以为1~4只,考虑到计量斗称重传感器既起到称重的作用又对计量斗起到固定与支撑作用,所以每个计量斗选用3只S型拉式传感器悬吊安装,3只传感器呈120°均匀分布以保证受力均匀。综合考虑计量精度和可靠性等因素,PLC选用性价比较高的S7-224XP CN西门子PLC,称重传感器选用TSC-200传感器,称重仪表选用IND320,触摸屏选用DOP-B07E515。
3 系统软件设计
系统的软件控制程序流程如图2所示。
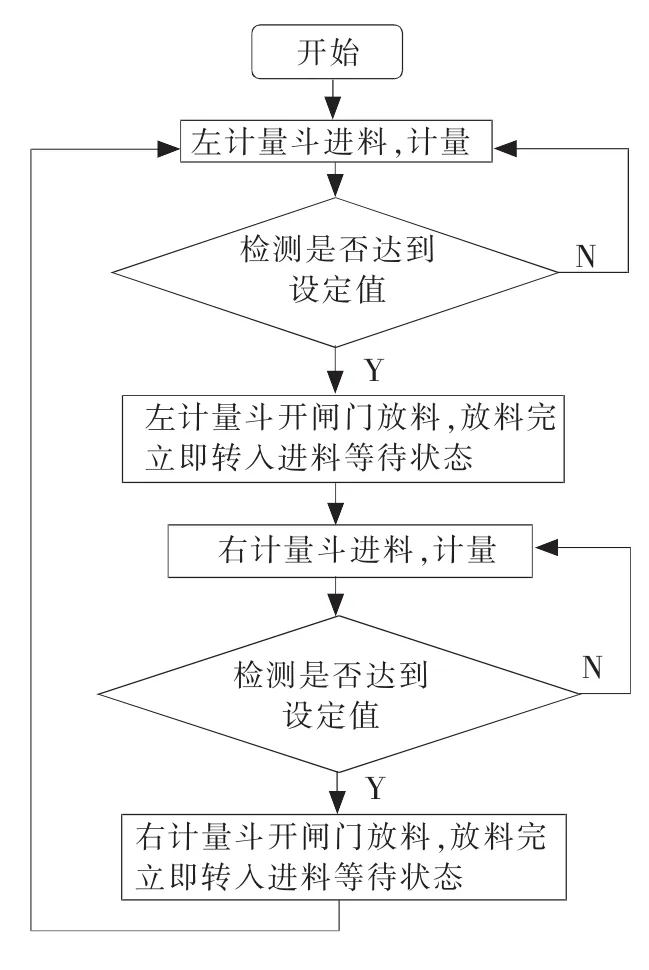
图2 主程序流程图Fig.2 Flow chart of main program
3.1 称重仪表与PLC的接口通信软件设计
称重仪表输出有模拟输出或串行口数字输出[13],为了把计量斗重量数据传送到PLC,可选用模拟信号传输方式或串行通信方式。由于系统选用的称重仪表为数字式仪表,重量数据在仪表内部已经转化成了数字量,如果用模拟信号传输给PLC,仪表要进行D/A转换,PLC需要增加模拟输入模块,再经过A/D转换把模拟量转化为数字量,一方面增加了成本,另一方面经过多次转换降低了计量精度。所以,本设计采用串行通信方式直接传输数字量。称重仪表串行通信一般采用RS-485方式,通信协议为MODBUS,但很多PLC没有直接支持MODBUS协议的软件模块,需要通过PLC编程实现与仪表的MODBUS协议通信,为了保证通信的可靠性,必须采用有效的抗干扰措施,包括通信线的屏蔽、终端电阻以及采用数据重发和软件容错算法等。
3.2 自动称量动作流程设计与PLC控制软件实现
连续输送物料计量称重系统靠2套计量装置合理切换与配合来保证物料流的连续性和计量的准确性,要实现严格时序关系,关键在于自动称量动作流程设计和PLC控制程序的编制,要在保证物料流连续性的前提下,合理分配物料切换时间、计量前的稳定时间、计量采样时间和放料时间的长短,并保留一定的时间裕度,以确保系统运行的可靠性。最终的控制方案需要经过实际运行测试,并通过多次优化后确定最终值。
4 系统动态特性分析
经过简化,单自由度二阶系统可以作为该计量称重系统的力学模型[14],见图3。其中,主加料质量、空秤皮质量分别为m1和mz,在t1时间内,主加料冲击力为f(t),受力分析如图3所示。
若物料下落高度较小,并且时间t1很短,一阶跃函数m1g1(t)可以近似看作f(t)作用的动力学模型,系统的运动方程如下:

式中:k为计量称重系统等效弹性系数;c为计量称重系统等效阻尼系数;x(t)为计量称重系统位移量。
在零初始条件下,对式(2)进行拉氏变换得到

整理后得

在欠阻尼(0<ξ<1)情况下,拉氏逆变换并整理后得

式中:阻尼比ξ=c/{2[(m1+mz)k]1/2};无阻尼固有频率ωn=[k/(m1+mz)]1/2;有阻尼固有频率ωd=ωn(1-ξ2)1/2。
系统稳定输出为x(∞)=m1g/k,乘以弹性系数k即得质量m1g。要快速准确得出质量m1,必须尽可能提高系统的响应速度,通过增加ωn,使ξ达到最佳阻尼比0.707左右[15]。由于称量传感器量程限制了主加料质量和空秤皮质量,称量传感器结构限制了系统等效弹性系数,因此系统本身阻尼系数较小。通过对系统的动态分析,系统为增加阻尼比ξ可外加阻尼器,从而达到增加阻尼系数c的目的,为了使阻尼比ξ维持在最佳阻尼比0.707左右,也可以采用动态数字补偿处理方法来改变系统阻尼系数,使ξ趋近最佳阻尼比0.707。考虑到在增强系统阻尼系数的同时,又要使系统具有较高的响应速度,所以二阶控制系统的设计需要采取合理的折中方案或补偿方案,才能达到设计的目的。

图3 计量称重系统力学模型Fig.3 Mechanical model of weighing system
5 结 语
通过系统分析,提出了连续输送物料计量称重系统的设计方案,采用动态切换和双称量斗互备缓冲的计量方式,在保证物料输送连续性的基础上,解决了连续输送物料的精确计量和快速称重的难题,确保了物料流连续性和计量准确性的统一,计量精度高于0.5%,可作为贸易结算计量等用途,可替代传统皮带秤或核子秤。
/References:
[1] 刘占阳,孙海波,李天智.一种连续输送散装物料的静态计量装置[P].CN:201120085326,2011-03-28.LIU Zhanyang,SUN Haibo,LI Tianzhi.A Static Measure and Continuous Conveying Bulk Material Device[P].CN:201120085326,2011-03-28.
[2] 杨 昕,李 琦.多台称重仪计算机管理系统的开发[J].河北科技大学学报,2001,22(4):22-29.YANG Xin,LI Qi.The development of multiple weighing instrument of computer management system[J].Journal of Hebei University of Science and Technology,2001,22(4):22-29.
[3] JAFARIPANAH M.Application of analog adaptive filters for dynamic sensor compensation[J].IEEE Transactions on Instrumentation and Measurement,2005,54(1):245-251.
[4] 张西良,纪开荣,李萍萍,等.混合式定量称量系统动态特性分析及数字补偿[J].农业机械学报,2005,35(6):119-121.ZHANG Xiliang,JI Kairong,LI Pingping,et al.Analysis and digital hybrid dynamic quantifying-weighing system compensation[J].Journal of Agricultural Machinery,2005,35(6):119-121.
[5] 李玮华,杨秦建.输送机托辊阻力及跑合试验综合性能测试仪的设计(上)——测试仪机械传动系统[J].河北科技大学学报,2006,27(4):326-328.LI Weihua,YANG Qinjian.Design of conveyor roller resistance and run test equipment and comprehensive performance test(on):Tester of mechanical drive system[J].Journal of Hebei University of Science and Technology,2006,27(4):326-328.
[6] 丛佩仁.浅谈电子秤的误差来源与解决方法[J].计量与测试技术,2008,35(6):45-47.CONG Peiren.The error sources of electronic scales and solutions[J].Journal of Test and Measurement Technology,2008,35(6):45-47.
[7] 万学功,张西良.基于多线程技术的选别机动态称重测控系统设计[J].中国计量,2008(1):80-81.WAN Xuegong,ZHANG Xiliang.Design of multi-thread technology classification machine dynamic weighing control system[J].China Metrology,2008(1):80-81.
[8] 李宝安,李行善,罗先和.动态称重系统计量误差的动态校正[J].仪器仪表学报,2001,22(3):252-253.LI Baoan,LI Xingshan,LUO Xianhe.Dynamic measurement errors in dynamic weighing system correction[J].Chinese Journal of Scientific Instrument,2001,22(3):252-253.
[9] 蒋杏国,李永新,吕富勇,等.动态称重信号采集系统设计[J].电子设计工程,2011,19(6):119-121.JIANG Xingguo,LI Yongxin,LYU Fuyong,et al.Dynamic weighing signal acquisition system design[J].Electronic Design Engineering,2011,19(6):119-121.
[10] 位显丽.上料动态称重系统的研究[J].工业控制计算机,2012,25(3):75-76.WEI Xianli.Study on the feeding of dynamic weighing system[J].Industrial Control Computer,2012,25(3):75-76.
[11] 魏中青,金萌时,苗晓刚.数据采集与分析系统在自动称重分级设备中的应用[J].机械与电子,2012(3):41-43.WEI Zhongqing,JIN Mengshi,MIAO Xiaogang.Data acquisition and analysis system in the application of automatic weighing grader[J].Machinery and Electronics,2012(3):41-43.
[12] 王伟强,潘 刚.动态称重系统信号处理与自适应补偿设计[J].传感器与微系统,2010,29(7):69-71.WANG Weiqiang,PAN Gang.Signal processing system and adaptive compensation design of dynamic weighing[J].Transducer and Microsystem Technologies,2010,29(7):69-71.
[13] 潘若禹.基于 DSP的动态称重系统设计[J].现代电子技术,2010(13):183-185.PAN Ruoyu.System design of DSP based on dynamic weighing[J].Modern Electronics Technique,2010(13):183-185.
[14] 张奕敏,胡荣强,李 涛.多传感器数据融合技术在车辆动态称重中的应用[J].仪表技术,2009(2):60-61.ZHANG Yimin,HU Rongqiang,LI Tao.Multi-sensor data fusion technology in the application of vehicle dynamic weighing[J].Instrumentation Technology,2009(2):60-61.
[15] 苏良昱,赵忠彪.基于神经网络的动态称重系统的 DSP实现[J].计量与测试技术,2009,36(8):1-3.SU Liangyu,ZHAO Zhongbiao.Implementation of neural network dynamic weighing system based on DSP[J].Metrology and Measurement Technique,2009,36(8):1-3.