航天太阳敏感器的应用与发展
2013-03-11王红睿李会端
王红睿,李会端,方 伟
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.楚雄师范学院,云南楚雄675000)
1 引言
太阳敏感器是航天任务中的一种常用光电姿态传感器,可提供太阳矢量与航天器上特定轴线间的角度反馈[1-5]。几乎所有的航天器都需要安装太阳敏感器,以便根据太阳敏感器提供的姿态反馈信息完成航天器各个阶段的姿态控制任务。当卫星发射入轨后或因各种故障丢失原有姿态后,卫星控制系统一般首先启动大视场太阳敏感器,根据太阳敏感器的反馈并结合自身的缓慢自旋运动搜索太阳,尽快实现对日定向。在卫星的稳态在轨运行中,卫星根据数字太阳敏感器的高精度反馈,确定太阳与航天器本体坐标系的位置关系,实现航天器的高精度姿态控制,例如对地观测卫星的三轴稳定控制。
相对星敏感器、红外地球敏感器等其他姿态敏感器而言,太阳敏感器具有单机结构简单、造价低等诸多优点。此外,由于太阳的亮度高,太阳敏感器的定位处理几乎不受其他天体的干扰。太阳敏感器中的滤光片可很大程度上去除杂散光的影响。通常而言,为了构造高冗余度的飞行导航系统,保证航天器的姿态控制系统在各种异常情况下正常运行,需要在不同的航天器位置安装多个数字太阳敏感器和模拟太阳敏感器[5-7]。除了用于航天器的姿态控制,太阳敏感器还应用于构建在轨太阳跟踪控制系统,例如太阳电池帆板的对日定向控制、太阳活动观测仪器的对日控制[8]。另外,在各类行星探测系统的导航控制中,太阳敏感器也有重要应用。这是由于一方面火星、月球等星体的磁场较弱,难以应用磁强计等磁场探测器实现导航定位,另一方面,火星、月球等星体也没有部署卫星导航系统,所以,基于太阳敏感器的行星导航控制受到了相当的重视[1]。
早期的太阳敏感器采用模拟光电探测器,通过测量光电池等器件的电流输出来获取入射太阳光的角度信息。其中,入射太阳光的角度与光电探测器的电流输出满足特定规律。之后,出现了以图像传感器来替代光电池等模拟探测器的数字太阳敏感器。与光电池相比,基本探测单元从几个增加到了几百个,甚至是上万个,大幅度地提高了太阳敏感器感知太阳光的能力。早期的数字太阳敏感器大多基于小孔成像的原理,采用无透镜的光学设计。焦平面之前是具有单一光孔或单一狭缝的掩模。这种掩模为单一光孔或单一狭缝的太阳敏感器具有结构简单、易于实现等优点,但仪器视场(FOV)较小,测量精度受到图像传感器噪声、杂散光等不利的影响。由于焦平面图像中只有一块太阳像点,同时图像传感器可能存在像素坏点,太阳像点中心提取算法容易受到各类噪声干扰,且这些干扰难以去除,影响后继的太阳角度计算。另外,若单一光孔部分或全部被阻塞,则太阳敏感器性能下降或失灵。为了进一步提高太阳敏感器的测量精度,出现了具有多光孔或多狭缝的太阳敏感器。对于这种掩模为多光孔或多狭缝的太阳敏感器而言,其焦平面探测器可获取同时具有多个太阳像点的图像,结合后继的中心提取算法,可降低图像传感器噪声和太阳敏感器内部杂散光的影响[9-15]。
由于尺寸和功耗较大,上述的一般航天太阳敏感器通常无法安装在微小卫星上。皮卫星等微小航天器的姿态控制、自主火星车或月球车的定位导航需要低功耗、小尺寸的微型太阳敏感器。微型太阳敏感器包括精密掩模和单片焦平面探测器等部件。精密掩模上具有通过微机电系统技术加工而成的单一微小光孔或多个微小光孔。单片焦平面探测器一般为高度集成的有源像素传感器(Active Pixel Sensors,APS)探测器,其中包括像素阵列、A/D变换器、时序控制电路等[16-19]。
本文从航天太阳敏感器的工作原理、太阳敏感器的结构、光学系统设计、光电探测器、太阳像点中心提取算法等几个方面出发,主要围绕航天数字太阳敏感器,结合现有的主流太阳敏感器航天产品,简略地介绍了航天太阳敏感器的发展历史,叙述了航天太阳敏感器的技术现状,并讨论了航天太阳敏感器的未来发展趋势。
2 太阳敏感器原理
太阳敏感器可大体分为三类。第一类为“0-1”太阳敏感器,光电探测器为光电池,光电池上面为入射狭缝,一旦太阳光入射,则光电池产生阶跃响应。这种太阳敏感器仅能给出太阳在视场中、视场外两个结果,可快速捕获太阳,但无法给出太阳角度信息,可用于星敏感器等光学仪器保护、航天器的粗定姿。第二类为模拟太阳敏感器,大多利用光电池作为光电探测器,当太阳光照射到光电池时,光电池的输出电流大小与太阳光入射强度的垂直分量满足特定关系。可由试验来精确测定其中的参数。以光电池为探测器的模拟太阳敏感器工作过程为:首先,太阳光照射光电池,光电池输出电流;然后,光电池输出的微弱电流信号经拾取、放大、模数转换等处理,送入信息处理单元;最后,信息处理单元根据查表等特定方法获取当前的入射太阳光角度信息。相对数字太阳敏感器,模拟太阳敏感器的优点是结构简单、造价较低,航天器上通常安装大视场的模拟太阳敏感器用于在失去姿态等异常状态下搜索太阳。模拟太阳敏感器的缺点是角度测量精度相对较低。第三类为数字太阳敏感器,其采用小孔成像的原理构造光学系统,以图像传感器作为焦平面探测器,目前广泛用于各类大型卫星、微小卫星和行星探测系统等。相对模拟太阳敏感器而言,由于数字太阳敏感器中的光学系统可有效去除杂散光影响,同时图像探测器的基本光电探测单元数量较多,数字太阳敏感器可在原理设计、系统实现等环节去除地球反射太阳光等误差因素,提高测量精度[3,9,13]。
大多航天数字太阳敏感器以小孔成像的原理工作,主要由光学系统、光电探测器和信息处理单元组成,见图1。光学系统主要包括光孔或狭缝、视场光阑和衰减片。焦平面探测器一般为图像传感器,例如面阵CCD。信息处理单元完成图像处理等工作,提取太阳像点的中心,给出入射太阳光的角度信息。
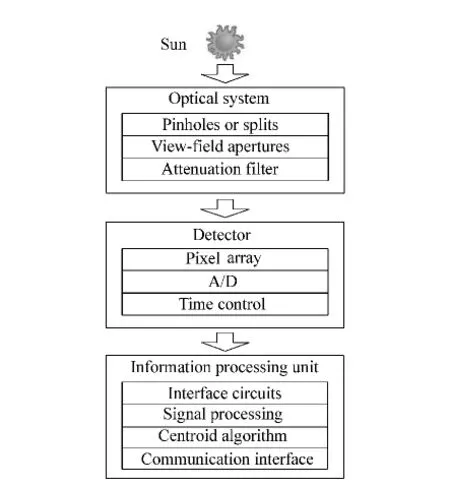
图1 数字太阳敏感器组成Fig.1 Structure of digital sun sensor
单光孔太阳敏感器的示意图见图2。单光孔太阳敏感器的工作过程如下。入射的太阳光从唯一的光孔入射后,由衰减滤光片降低入射光的能量,防止入射光的能量过强,损害图像探测器。衰减后的太阳光入射到焦平面探测器上,形成具有单一太阳像点的焦平面图像[3]。焦平面图像记录了入射太阳光的信息。信息处理单元读取焦平面图像后,通过图像处理方法来定位太阳像点中心的像素坐标(xc,yc),最后给出入射太阳光相对于太阳敏感器主光轴的角度δ。

图2 单光孔太阳敏感器示意图Fig.2 Illustration of sun sensor with single aperture
图1中,太阳光与太阳敏感器主光轴夹角δ为:

式中:焦距f为光孔到探测器焦平面的距离,x是太阳像点中心在焦平面的X轴位移,y是太阳像点中心在焦平面的Y轴位移。
太阳像点中心位移x与y可由太阳像点中心的像素坐标(xc,yc)、图像传感器参数等来获取。
3 光学系统设计
为了提高系统的可靠性、鲁棒性,降低系统造价,大多数航天太阳敏感器都采用小孔成像的原理来工作,采用无透镜等光学元件的光学系统设计,不存在像差,易于系统的设计、加工和装调,可承受强烈振动的发射环境,便于航天产品的抗力学环境设计[2-3]。
航天数字太阳敏感器的光学系统主要包括光孔或狭缝、视场光栏、衰减滤光片等组件。光孔或狭缝的设计对系统测量精度有重要的影响。早期的数字太阳敏感器大多采用单光孔或单光缝的设计[5,9]。单光孔或单光缝的优点是易于系统设计和实现,但是由于焦平面图像上仅有一个太阳像点,太阳像点中心提取算法容易受到图像噪声、太阳敏感器内部杂散光的影响,导致太阳角度测量精度下降。为了提高太阳敏感器的测量精度和系统的可靠性,研究人员提出了具有多光孔或多狭缝的太阳敏感器[13,15,20],如图 3 和图 4 所示。图5是一个采用N型狭缝和线阵CCD的太阳敏感器。这种多光孔或多狭缝的设计可提高系统的抗噪声能力。以图3中的多光孔数字太阳敏感器为例,入射太阳光在焦平面上同时形成多个太阳像点后,信息处理单元由多个太阳像点获取了多个太阳角度测量值,进行平均处理等操作后,可降低随机噪声的影响。然而,这种多光孔或多狭缝的光学设计增大了系统的计算负荷,太阳像点中心提取算法较为复杂,需要额外的处理时间。

图3 多光孔太阳敏感器示意图[13]Fig.3 Sun sensor with multiple apertures[13]

图4 多狭缝太阳敏感器[20]Fig.4 Sun sensor with multiple splits[20]

图5 N型狭缝太阳敏感器示意图[15]Fig.5 Illustration of sun sensor with N type split[15]
考虑到太阳光的辐照度强,在轨的辐射环境可能伤害大规模集成电路,故一般采用衰减滤光片减低入射太阳光的能量来保护图像探测器。在设计衰减滤光片时,首先要考虑图像探测器的特性,控制入射到图像探测器上的太阳光谱频带和入射光辐照度;其次,结合航天任务的抗辐射要求,对图像探测器进行抗辐射加固。另外,应合理选择滤光片的通带透过率系数,准确调整入射到图像探测器上的光通量,以保证图像探测器工作在非饱和区,维持图像探测器的最佳工作状态。
在太阳敏感器的光学系统设计中,数字太阳敏感器的视场与角度分辨率是一对相互制约的指标,应结合航天任务的具体背景和光学系统设计指标权衡决定。
4 光电探测器
模拟太阳敏感器,一般选用光电池、光电二极管作为光电探测器,这些光敏元件结构简单,后面的信号探测电路和太阳角度计算方法的复杂度都相对较低,系统造价较低。早期的数字太阳敏感器大多采用电荷耦合器件(Charge Coupled Device,CCD)作为焦平面光电探测器,例如线阵CCD和面阵CCD。现有的大部分数字太阳敏感器则采用互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)有源像素传感器(Active Pixel Sensor,APS)图像传感器[9-10,13]。CMOS APS图像传感器采用单个像元的有源晶体管产生信号,没有光影、光晕等失真,并且内部集成了信号采样、信号放大、A/D转换、串行命令总线和多位并行数据输出接口。相对CCD成像器件,CMOS APS图像传感器具有高集成度、低噪声、低功耗、高传输效率等优点。CMOS APS图像传感器还具有较强的抗辐照能力,采用单一电源供电。对于太阳敏感器而言,CMOS APS图像传感器比多电源供电的CCD成像器件有明显的优势,利于系统的紧凑设计。
上述的一般太阳敏感器,受制于尺寸、功耗等因素,无法安装在微小航天平台上。为了实现微小卫星的姿态控制和行星探测系统的定位导航,研究人员采用MEMS技术,提出微型光电探测器,用于构造 微型太阳敏感器[4,9-10,16,21]。文献[4]设计了微型模拟光电探测器,用于构造微小的太阳敏感器。其中的微型模拟光电探测器为两对正交安装的光电二极管。两对光电二极管在同一块硅基底上生长。文献[10]考虑微小航天器的任务要求,提出了一种集成了光学系统和CMOS APS图像传感器的微型光电探测器,外形大小见图6,其中的光电探测器包括512 pixel×512 pixel阵列、512个A/D转换器、数字逻辑、时序控制电路[10]。前置多孔掩模采用MEMS技术加工而成,与光电探测器封装在一块芯片上。文献[9]则进一步提出了无线、自主、高集成度的微型数字太阳敏感器,见图7,将太阳敏感器的光学系统、光电探测器、信息处理单元、太阳能电池板、RF通信单元整合到了单一芯片上,缩小了系统尺寸,降低了功耗。图8是无线微型数字太阳敏感器的功能框图。

图6 微型模拟光电探测器示意图[4]Fig.6 Illustration of micro analog photo detector[4]

图7 微型数字太阳敏感器[10]Fig.7 Micro digital sun sensor[10]
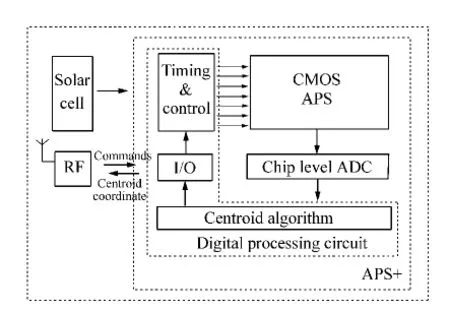
图8 无线、自主微型数字太阳敏感器结构示意图[9]Fig.8 Illustration of wireless and autonomous micro digital sun sensor[9]
5 太阳像点中心提取算法
太阳敏感器的信息处理单元用于在获取焦平面图像后,对焦平面图像进行处理[22-24],对焦平面图像中的每个太阳像点中心进行标记,计算每个太阳像点中心的像素标号,进而获取入射太阳光的角度。对于采用单光孔和二维图像传感器的太阳敏感器而言,焦平面图像中只有一个太阳像点,通常采用重心法获取太阳像点中心[22-25],太阳像点中心提取算法如下[17,26-27]:(1)设置灰度阈值gt,用于将焦平面图像分割为太阳像点区域和背景区域。(2)像素标记,将灰度值超过阈值gt的像素标记为太阳像点区域的像素,否则标记为背景区的像素。(3)计算太阳像点中心(xc,yc)的像素标号,见图2,太阳像点中心(xc,yc)的像素标号为:
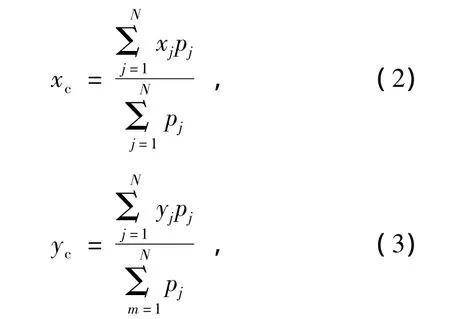
式中:pj为太阳像点区域的像素灰度,xj是太阳像点区域像素的列标号,yj是太阳像点区域像素的行标号,N为太阳像点区域的像素总数。
图9是单光孔数字太阳敏感器焦平面图像和太阳像点中心的标记结果[27]。图9(a)为数字太阳敏感器抓取的焦平面图像,图9(b)为对焦平面图像进行图像分割、太阳像点中心像素的处理结果。

图9 单光孔数字太阳敏感器焦平面图像和太阳像点中心标记结果[27]Fig.9 Sun image obtained by digital sun sensor with single aperture and centroiding results of sun spot[27]
上述太阳像点中心提取算法每一次都要遍历焦平面图像中的全部像素,每次遍历光电探测器全部像素的大约需要几瓦的能量。考虑到微小航天平台的功耗严格受控,微型太阳敏感器一般采用首先粗略定位、然后精确定位的太阳像点中心提取算法,算法分成两步。第一步,粗略定位阶段,对应文献[9]的获取(acquisition)阶段,按照一定的原则抽取部分元素,例如等间距的方法,获取大致的包含太阳像点的兴趣区域ROI(Region of Interest)。第二步,精确定位阶段,对应文献[9]的跟踪(tacking)阶段,在第一步确定的兴趣区域ROI中,采用重心法提取太阳像点中心。这种先粗略定位再精确定位的二步处理方法只需要处理部分的像素,不需要处理全部的像素,降低了太阳像点中心获取耗费的能量,适合于功耗敏感的微小卫星。
6 现有航天产品
几乎每一颗卫星、每一艘飞船都要安装太阳敏感器,太阳敏感器的产品研制受到了各国厂商、研究机构、大学等组织的广泛关注[28-31]。因此,各种航天用太阳敏感器相继问世,见表1。与模拟太阳敏感器相比,数字太阳敏感器的优点是测量精度高,其缺点是数字太阳敏感器中的图像传感器成本较高,易受空间辐射影响,导致入轨后图像传感器性能下降,单机寿命存在风险。数字太阳敏感器的可靠性仍需进一步提高。由于模拟太阳敏感器具有结构简单、可靠性好、单机造价低、在轨寿命长等显著优势,模拟太阳敏感器依旧被广泛应用,特别是角度测量精度较低的各种系统。高集成度的微型数字太阳敏感器则仍停留在试验阶段。

表1 部分太阳敏感器航天产品Tab.1 Some products of current sun sensors
7 结论
所有的航天任务几乎都需要安装航天太阳敏感器,故航天太阳敏感器的研制一直受到了相当的关注。从模拟的光电池探测器到全数字高度集成化的CMOS APS光电探测器,从单光孔到采用MEMS技术的多光孔高分辨率掩模,航天太阳敏感器在光学系统设计、系统微型化等方面取得了较大的进展。未来的航天任务要求航天太阳敏感器能够自主处理更为复杂的光照环境,同时视场角、角度分辨率等常规指标进一步提高,这意味着需要更高的测量精度,更低的功耗,更大的感知范围和更为智能的处理算法。在火星探测、小行星探测、长期飞行等航天任务中,航天太阳敏感器面临着诸多挑战。例如,未知的环境或者长距离飞行可能导致太阳光照条件出现较大的变化,静态的太阳角度计算算法可能会出现问题,导致太阳敏感器性能下降甚至失灵,影响行星探测或者飞行任务。航天太阳敏感器的鲁棒性、自主能力还要进一步提高,以满足未来航天任务的需要。
[1] FURGALE P,ENRIGHT J,BARFOOT T.Sun sensor navigation for planetary rovers:theory and field testing[J].IEEE Trans.Aerosp.Electron.Syst.,2011,47(3):1631-1647.
[2] DELGADO F,QUERO J,GARCíA J,et al..Accurate and wide-field-of-view MEMS-based sun sensor for industrial applications[J].IEEE T.Ind.Electron.,2012,59(12):4871-4880.
[3] RUFINO G,GRASSI M.Digital sun sensor multi-spot operation[J].Sensors,2012,12:16451-16465.
[4] ORTEGA P,RODR GUEZ G,RICART J,et al..A miniaturized two axis sun sensor for attitude control of nano-satellites[J].IEEE Sensors J.,2010,10(10):1623-1632.
[5] ENRIGHT J,GODARD.Design optimization of a digital sun sensor for use with parametric processing[J].IEEE T.Instrum.Meas.,2008,57(10):2188-2195.
[6] ENRIGHT J,SINCLAIR D,LI C.Embedded algorithms for the SS-411 digital sun sensor[J].Acta Astronaut,2009,64:906-924.
[7] ENRIGHT J,YAM A,LI C.Modeling and testing of two-dimensional sun-sensors[C]//Proceedings of the 2007 IEEE Aerospace Conference,Mar.3-10,2007,Big Sky,MT,USA,2007:1-11.
[8] WANG H R,WANG Y P.Spaceborne radiometers for measuring total solar irradiance[J].Chinese Optics,2012,5(6):555-565.
[9] XIE N,THEUWISSEN A.An autonomous micro digital sun sensor by a CMOS imager in space application[J].IEEE T.Electron Dev.,2012,59(12):3405-3410.
[10] LIEBE C,MOBASSER S.MEMS based sun sensor on a chip[C]//Proceedings of 2003 IEEE Conference on Control Applications.Jun.23-25,2003,Istanbul,Turkey,2003,(2):1483-1487.
[11] RUFINO G,GRASSI M.Mission-oriented micro-sun-sensor laboratory testing in real-time operation mode[C]//Proceedings of the 61th International Astronautical Congress,IAC 2010,Sep.21-Oct.1,2012,Prague,Czech Republic,2012:4737-4745.
[12] RUFINO G,GRASSI M.Micro sun sensor performance validation in ground reproduced orbital conditions[C]//Proceedings of 1st IAA Conference on Dynamics and Control of Space Systems,Mar.19-21,2012,Porto,Portugal,2012:331-342.
[13] YOU Z,SUN J,XING F,et al..A novel multi-aperture based sun sensor based on a fast multi-point meanshift(FMMS)algorithm[J].Sensors,2011,11:2857-2874.
[14] RUFINO G,GRASSI M.Multi-aperture CMOS sun sensor for microsatellite attitude determination[J].Sensors,2009,9:4503-4524.
[15] WEI M,XING F,LI B,et al..Investigation of digital sun sensor technology with an N-shaped slit mask[J].Sensors,2011,11:9764-9777.
[16] BONOCORE M,GRASSI M,RUFINO G.APS-based miniature sun sensor for earth observation nanosatellites[J].Acta Astronaut,2005,56:139-145.
[17] CHANG Y,LEE B.Development of high-accuracy image centroiding algorithm for CMOS-based digital sun sensors[J].Sens.Actuat.A,2008,144:29-37.
[18] BÖHNKE T,EDOFF M,STENMARK L.Development of a MOEMS sun sensor for space applications[J].Sens.Actuat.A,2006,130/131:28-36.
[19] CHANG Y,YUN M,LEE B.A new modelling and validation of two-axis miniature fine sun sensor[J].Sens.Actuat.A,2007,134(2):357-365.
[20] 尉志军,刘晓军,吕政欣.一种新型太阳敏感器[J].光电工程,2010,37(5):123-127.WEI ZH J,LIU X J,LÜ ZH X.A new kind of sun sensor[J].Opto-Electronic Eng.,2010,37(5):123-127.(in Chinese)
[21] ORTEGA J,TARRIDA C,QUERO J,et al..MEMS solar sensor testing for satellite applications[C]//Proceedings of 7th Spanish Conf.CDE,Feb.11-13,2009,Santiago,Spain,2009:345-348.
[22] 刘希佳,陈宇,王文生,等.小目标识别的小波阈值去噪方法[J].中国光学,2012,5(3):248-256.LIU X J,CHEN Y,WANG W SH,et al..De-noising algorithm of wavelet threshold for small target detection[J].Chinese Optics,2012,5(3):248-256.(in Chinese)
[23] 王希军.激光散斑的亚像素位移法计算及比较[J].中国光学,2012,5(6):652-657.WANG X J.Computation and comparison of laser speckle with sub-pixel measurement methods[J].Chinese Optics,2012,5(6):652-657.(in Chinese)
[24] 陶李,王珏,邹永宁,等.改进的Zernike矩工业CT图像边缘检测[J].中国光学,2012,5(1):48-56.TAO L,WANG J,ZOU Y N,et al..Improved Zernike moment for industrial CT image edge detection[J].Chinese Optics,2012,5(1):48-56.(in Chinese)
[25] 吴福培,张宪民.印刷电路板无铅焊点假焊的检测[J].光学 精密工程,2011,19(3):697-702.WU F P,ZHANG X M.Inspection of pseudo solders for lead-free solder joints in PCBs[J].Opt.Precision Eng.,2011,19(3):697-702.(in Chinese)
[26] 王红睿,方伟,王玉鹏.智能双模式太阳跟踪器[J].光学 精密工程,2011,19(7):1605-1611.WANG H R,FANG Y,WANG Y P.Intelligent solar tracker with double modes[J].Opt.Precision Eng.,2011,19(7):1605-1611.(in Chinese)
[27] 王红睿,方伟.基于图像处理的太阳矢量倾角测量方法[J].微计算机信息,2011(6):4-6.WANG H R,FANG W.Measuring method for inclination angle of sun light vector with image processing technique[J].Microcomputer Information,2011(6):4-6.(in Chinese)
[28] S3-Smart sun sensor[EB/OL].(2013-03-25).http://selex-es.com/~ /media/Files/S/Selex-Galileo/product-directory/space/S3_Dsh-196.pdf.
[29] 施蕾,周凯,张建福,等.基于FPGA的小型化太阳敏感器图像采集与处理方法[J].空间控制技术与应用,2012,38(4):35-39.SHI L,ZHOU K,ZHANG J F,et al..FPGA-based image acquisition and processing method for miniature sun sensor[J].Aerospace Control and Appl.,2012,38(4):35-39.(in Chinese)
[30] Fine Sun Sensor[EB/OL].(2013-04-05).http://www.jena-optronik.de/en/aocs/fss.html.
[31] Fine Sun Sensors[EB/OL].(2013-04-10).http://bradford-space.com/userfiles/500-813%20Bradford%20Fine%20Sun%20Sensor%200213.pdf.
