滚子螺旋传动中滚子与丝杠之间相对滑动的机制研究
2013-03-09陈小芬李东波史翔
陈小芬,李东波,史翔
(1.南京理工大学机械工程学院,江苏南京210094;2.南京工程大学,江苏南京 211167)
滚子螺旋传动中滚子与丝杠之间相对滑动的机制研究
陈小芬1,李东波1,史翔2
(1.南京理工大学机械工程学院,江苏南京210094;2.南京工程大学,江苏南京 211167)
以城轨车辆门系统传动部件用滚子丝杠系统为研究对象,对滚子丝杠传动进行系统的运动学理论分析,通过虚拟样机技术模拟门系统的运动,对丝杠传动中滚子自转的转速进行理论值与实际值的比较和分析,得出滚子与丝杠之间的相对滑动以及影响相对滑动的因素。
滚子丝杠;运动学;相对滑动
磨损是设备和材料失效的主要形式,对于磨损的研究不仅可以从材料和润滑状况的角度来研究,还可以从运动学相对滑动的角度来研究。
滚子丝杠螺旋副中滚子在螺旋轨道中做复杂的螺旋运动,以滚动为主,伴随着滑动,滑动的存在,导致滚子与丝杠之间摩擦因数明显增大,磨损加剧[1]。文中将从运动学角度来研究滚子与丝杠之间的相对滑动。
多刚体系统的运动学理论通常是理想状况下的运动,而实际运动受各种因素的影响,运动比较复杂,ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是集建模、求解、可视化为一体的机械产品虚拟样机开发软件,可以对系统进行运动及受力分析、性能预测等。基于以上优点,在Solidworks中建立模型,导入ADAMS中进行虚拟样机的分析,并结合理论计算结果,分析滚子与丝杠之间的相对滑动。
1 滚子丝杠系统的运动学理论分析
1.1 理论模型和坐标系的建立
滚子丝杠运动模型如图1所示,丝杠半径rm=10 mm,滚子半径rb=5 mm,设O-X'Y'Z'为固定坐标系,Z'沿丝杠轴线方向,O-XYZ为转动坐标系,其Z 轴与 Z'轴同向,向量(i',j',k')和向量(i j k)分别表示O-X'Y'Z'和O-XYZ各坐标轴的单位向量[2]。Ω为丝杠轴在固定坐标系的旋转角度,θ为滚子相对于丝杠轴的旋转角度。同时在滚子运动轨迹任一点建立 Frenet-Serret活动标架[3-4],(τ,n,b)为活动标架矢量。

图1 Frenet-Serret活动标架

根据固定坐标系和转动坐标系之间的坐标转换关系可得到固定坐标系中滚子运动轨迹的坐标矢量:

滚子运动轨迹已知,为了方便研究滚子的运动,选择Frenet-Serret标架,以滚子轴线上一点为原点,建立笛卡尔坐标系Ο'-τnb。
根据Frenet-Serret标架的基向量公式可以得出[5]:

令Y=[τ n b]T,根据滚子局部坐标Ο'-τnb与转动坐标系O-XYZ之间坐标变换关系可得到滚子上O'位置矢量在滚子局部坐标系中的表示:

1.2 运动学理论计算
滚子和丝杠之间接触的相对滑动是影响滚子磨损的重要因素,这一部分需要对滚子的运动进行分析。
由于滚子相对丝杠是沿着Frenet-Serret标架的切线方向τ运动,因此滚子与丝杠之间接触线位于Frenet-Serret标架的法平面上。为了分析接触之间的相对滑动,建立接触点坐标系i-XiYiZi,图2所示为在法平面和垂直于主法线的切平面上的接触坐标系。

图2 滚子与丝杠接触坐标系


有式 (8)可得,滚子上点O'的速度相对滚动局部坐标系只有切向分量。从物理角度分析,由于滚子与轨道之间的集合约束关系,滚子不能沿法平面运动。同理根据坐标变换矩阵,求得滚子上O'点运动相对于固定坐标系O-X'Y'Z'的速度:

令接触点B处的相对滑动速度的切向分量为0,

以上是对滚子丝杠系统运动学的理论分析,下面将对滚子丝杠传动进行虚拟样机仿真,进行模拟结果与理论值的比较和分析。
2 系统虚拟样机的建立和分析
2.1 虚拟样机的建立
由于门系统模型比较复杂,ADAMS的建模功能较弱,需要在Solidworks中建立门系统的三维模型,另存为Parasolid格式,再导入到ADAMS中。
三维建模中需要注意门系统各个部件之间的装配关系。ADAMS虚拟样机建模中的关键是对各刚体之间运动副的设置,尤其是对滚子与丝杠之间运动副的设置[6],此处对滚子与丝杠之间采用Solid对Solid的Contact连接,并对Contact力的各项参数进行设置。另外需要对Solver进行相关选项的设置[7-8],最后对丝杠施加旋转驱动,对模型进行验证成功后,得到门系统的虚拟样机模型,如图3所示。
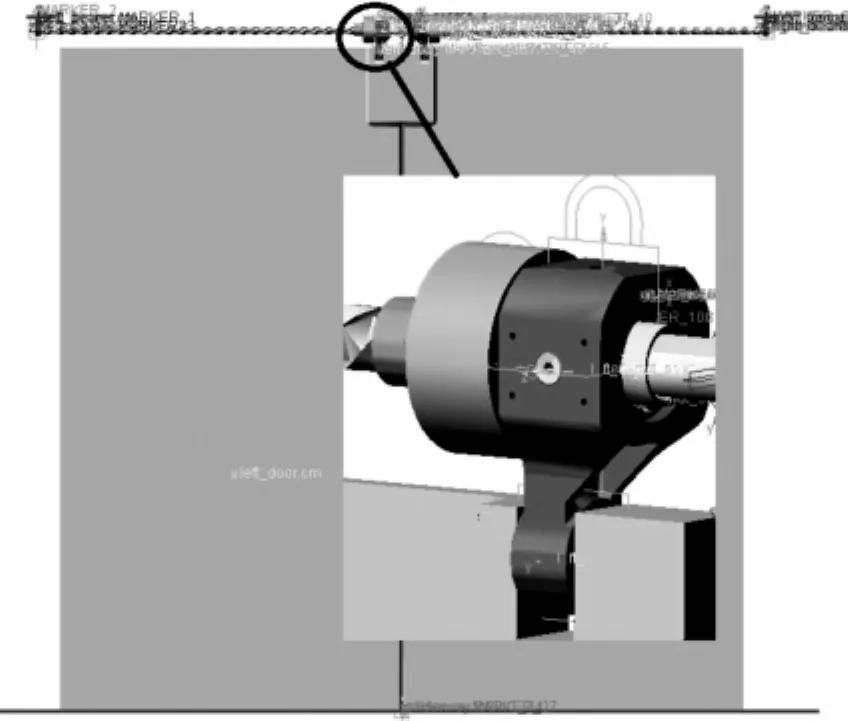
图3 门系统的虚拟样机
虚拟样机建立成功后就可以根据要求建立仿真,得到刚体的运动、受力、性能预测等所需要的结果。
2.2 仿真结果与理论值的比较和分析
滚子自转角速度的理论结果和仿真结果的对比如图4和图5所示,虚线所示为仿真结果,实线所示为理论结果。
由图4、5可以看到滚子转速的理论值与模拟结果非常接近,因此根据式 (14)和 (15)可以得出接触点B的相对滑动速度在切线方向上的分量为0。
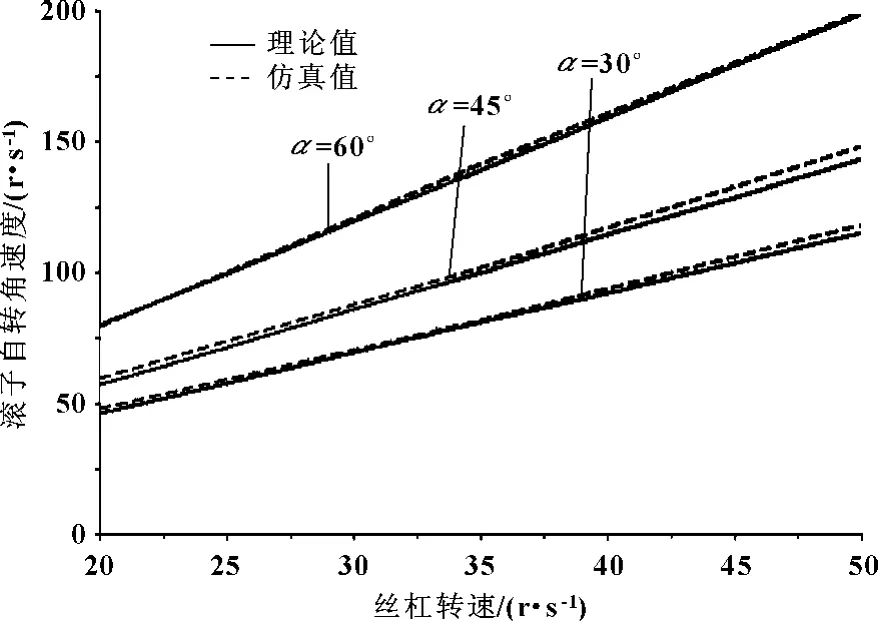
图4 丝杠转速对滚子自转角速度的影响
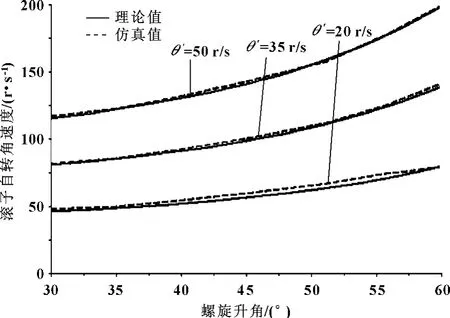
图5 螺旋升角对滚子自转角速度的影响
3 接触点相对滑动的结论分析
由第2节结论可以得出接触点的相对滑动在法平面方向上,因为滚子丝杠的螺旋升角α≠0,根据式(14)可得法向滑动速度不可能为0,也就是说滚子丝杠在运行过程中的滑动是不可避免的。以下对接触点相对滑动的分析如图6和图7所示。

图6 丝杠转速对相对滑动速度的影响
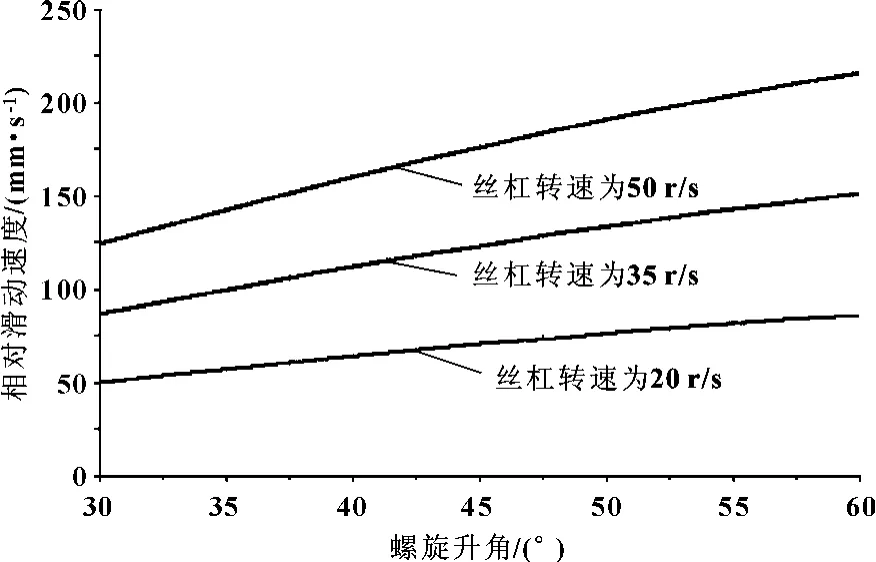
图7 螺旋升角对相对滑动速度的影响
由图5可知,丝杠转速由20 r/s增大到50 r/s,相对滑动速度线性增大,并且螺旋升角越大,相对滑动速度随丝杠转速增大得越快;由图6可知,螺旋升角由30°增大到60°,相对滑动速度正弦增大,并且丝杠转速越大,相对滑动速度随丝杠转速增大得越快。由图5和图6可以得到,丝杠转速对相对滑动速度的影响要远大于螺旋升角,尤其是当螺旋升角45°≤α≤60°时,相对滑动速度随螺旋升角的增大变化很小。
4 总结
利用理论和虚拟仿真技术对滚子丝杠系统进行了运动学研究和分析,通过对滚子自转转速进行理论值与模拟值的比较,得出滚子与丝杠之间的相对滑动主要存在于法线方向上的结论。最后对相对滑动结果进行分析,得出螺旋升角和丝杠转速对滚子与丝杠之间相对滑动的影响情况,为减小运动过程中滚子与丝杠的磨损提供了依据。
【1】陈曼龙.滚珠丝杠副滚动体滑动特性分析[J].机床与液压,2011,39(12):77 -79.
【2】JONESA B.Ball Motion and Sliding Friction in Ball Bearing[J].Transactions of the ASME,1959.
【3】涂兴凯,王华权,熊慧珺.大导成滚珠螺母内滚道的成型方法研究[J].机床与液压,2011,39(3):16 -18.
【4】范东风.大导程滚珠丝杠副螺母成型磨削加工建模与仿真[D].上海:上海交通大学,2009:37-42.
【5】方德植.微分几何基础[M].2版.北京:人民邮电出版社,1984:56-64.
【6】石傅强.ADAMS基础与工程范例教程[M].北京:中国铁道出版社,2008:16-18.
【7】战晓明,汤文成,汪爱清.基于ADAMS的滚珠丝杠副滚珠循环系统的动态仿真[J].信息技术,2010(4):110-113,119.
【8】伍建雄,焦志伟,伍先安.基于ADAMS的二板式注塑机合模装置机械液压耦合仿真[J].机床与液压,2011,39(10):109-112.
Mechanism Research on Relative Sliding between Roller and Screw in Roller Screw Transm ission
CHEN Xiaofen1,LIDongbo1,SHIXiang2
(1.School of Mechanical Engineering,Nanjing University of Science and Technology,
Nanjing Jiangsu 210094,China;2.Nanjing Institude of Technology,Nanjing Jiangsu 211167,China)
By taking the roller screw transmission system ofmass transitvehicles door as its researching object,the theoretical kinematic analysiswas processed for roller screw transmission system.Moreover,by simulating themovementof door system using virtual prototyping technology,the theoretical and practical values of the sub-rotation angular velocity of the roller in transmission were compared.Eventually the relative sliding and the factors affecting the relative sliding between the roller and screw are obtained.
Roller screw;Kinematics;Relative sliding
TH132;TP391
A
1001-3881(2013)9-054-4
10.3969/j.issn.1001 -3881.2013.09.015
2012-04-06
陈小芬 (1988—),女,硕士生,研究方向为先进制造技术及实际应用。E-mail:chenxiaofen908@163.com。
