船舶动力定位仿真系统设计
2013-03-08陈红卫
吴 楠,陈红卫
(江苏科技大学电子信息工程学院,江苏镇江 212003)
船舶动力定位仿真系统设计
吴 楠,陈红卫
(江苏科技大学电子信息工程学院,江苏镇江 212003)
为满足船舶动力定位系统研发、维护、操作培训等需要,在了解国内外动力定位仿真系统的基础上,设计动力定位仿真系统。研究动力定位系统的功能、组成、人机界面、仿真流程等问题。从模块模型函数标准、模型组件生成等方面设计仿真系统接口,并采用VB与Matlab混合编程实现接口功能,增强仿真系统的可扩展性和重用性。系统在预警处理、故障诊断方面等有待完善。
动力定位;仿真系统;接口编程;人机界面
0 引言
随着海洋开发逐渐由浅水向深水发展,船舶动力定位系统的应用将会不断增多,研究动力定位系统具有现实意义。在船舶动力定位系统研发中,若完成依靠实船试验,则不仅会耗费大量人力物力财力,而且由于深海区域作业环境较大的不确定性和高危险性会给试验带来较大难度,因此,研究动力定位系统需要一个好的仿真调试平台。希望此仿真平台能够模拟作业环境和动力定位系统中各模块的功能,这样不仅可以节省试验成本,而且更能研制出高可靠性和高性能的动力定位系统。此外,动力定位仿真系统在操作人员培训、设备维护等方面也具有很好的作用。现有的国外动力定位仿真系统,如NAVISNavDP4000 Trainer有很好的操作示例,但技术封锁决定了其封闭性,自行设计的动力定位控制器、推力分配算法等无法利用它进行试验。在此基础上,设计动力定位仿真系统,以弥补国外系统可扩展性和重用性的缺点。
1 动力定位系统
1.1 动力定位描述
动力定位系统是一种闭环控制系统,包括动力系统、推进系统和动力定位控制系统。它通过检测船舶的实际位置与目标位置的偏差,再结合当时风、浪、流等外界干扰力对船舶的影响,控制器计算出使船舶恢复到目标位置所需推力,由推力分配完成船舶上各推力器的推力,各推力器产生相应的推力使船舶尽可能地保持固定位置或预设航迹上。动力定位系统的突出优点有:适用水深广;定位成本不随着水深的增加而增加;定位精度高;机动性能好。它采用定点 (DP)控制和航行 (DT)控制2种控制状态。DP模式是船舶依靠自身推进器产生的力和力矩来抵消外界扰动力以达到定点定位的目的,这是本文的主要研究模式。DT模式是指轨迹跟踪模式,即船舶根据设定好的路线航行。
1.2 动力定位系统组成
动力定位系统[1]组成如图1所示,其中控制器和推力分配算法直接影响定位系统的性能。

图1 动力定位系统组成Fig.1 Composition of dynamic positioning system
2 仿真系统
2.1 仿真系统组成
根据动力定位系统的组成,抽象出仿真系统的组成如图2所示,图中采用数学模型代替实际系统中的功能模块。
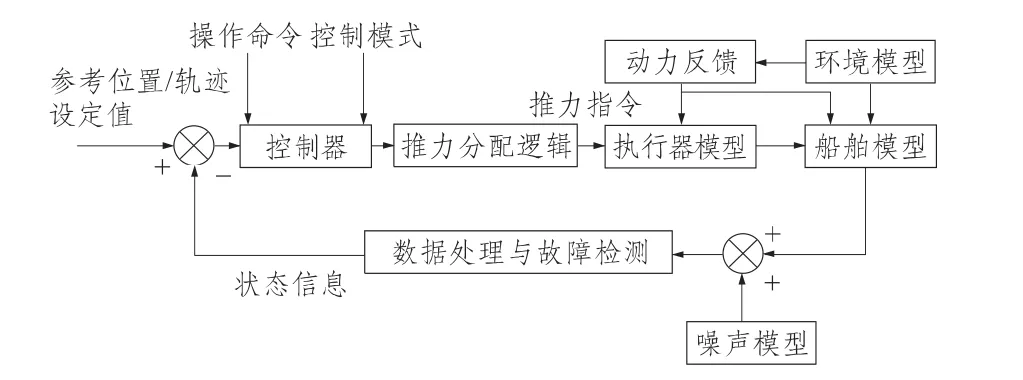
图2 动力定位仿真系统组成Fig.2 Composition of dynamic positioning simulatiion system
2.2 仿真系统功能
设计完成的仿真系统能够实现以下功能:
1)一般仿真功能。这是仿真系统的基本功能,这项功能可以满足动力定位系统操作培训需求。主要功能包括参数设置、切换操作模式、下达控制命令、仿真船舶动力定位过程、显示船舶实时姿态、显示历史曲线、处理报警信息以及生成报表等。
2)控制器、动力分配算法试验功能。这是仿真系统的高级功能,这项功能可以满足动力定位系统控制器、动力分配算法研发需求。设计的基本思想是:①仿真系统中的各部分模型做到可以应用进口设备已有的模型,或是实际应用中已经验证的模型;②仿真系统设计中预留必要的接口,做到可以替换其中任何模块;③仿真系统可以进行模块组合,如试验时可以选用除试验部分外其余均用确定模型的组合;④可以反复调试,取得最佳效果,达到研制目的。
3)环境、推进器以及对象模型试验功能。这是仿真系统的高级功能,这项功能可以满足动力定位系统模型验证需求。设计思想同2)。
4)故障模拟定位功能。这是仿真系统的高级功能,这项功能可以满足现有进口动力定位系统的故障维修训练需求。
2.3 仿真系统人机界面设计
人机界面 (又称用户界面或使用者界面)是系统和用户之间进行交互和信息交换的媒介,实现了信息的内部形式与人类可以接受形式之间的转换。因此,人机界面是仿真系统中非常重要的方面,设计时既要保证界面美观大方又要符合操作人员的操作习惯。通过人机界面操作人员能够对动力定位仿真系统进行各种操作,也能直观得到动力定位的效果。图3是动力定位仿真系统中环境设置的界面。

图3 人机界面示例Fig.3 Example ofman-machine interface
3 仿真系统数学模型
3.1 船舶运动数学模型
水面船舶动力定位只涉及到3个自由度的运动,即纵荡运动、横荡运动和首摇运动。船舶的运动方程以MMG模型为基础[2],建立纵荡、横荡和首摇的运动方程如下式。

式中:m为船舶质量;mx和my分别为X和Y方向上的附加质量;Jz为绕Z轴方向的附加转动惯量;下标为wi,wa,c,t,r的F/N分别表示风力、浪力、海流力、推力和舵力及力矩;u为纵荡速度;v为横荡速度;r为首摇角速度。附加质量和附加转动惯量可根据元良诚三图谱进行多元回归分析得到[3]。
3.2 环境数学模型
船舶环境主要考虑风、浪、流的影响[4],风力对船舶的作用力如下式:
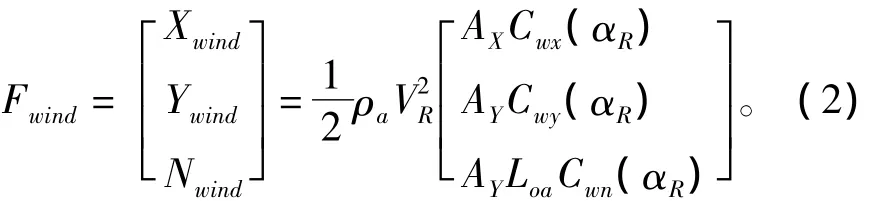
式中:ρa为空气密度;AX为平台水线上的正投影面积;AY为水线上的侧投影面积;Loa为平台的总长;VR为平台受到的相对风速;Cwx(αR),Cwy(αR)和Cwn(αR)分别为x,y方向的风阻力系数及绕z轴的风阻力矩系数,可以通过Isherwood[5]公式求得。
海浪的作用力采用Daidola[6]提出的波浪漂移力和力矩的计算公式,如下:

式中:ρ为海水密度,a为平均波浪幅值;χ为波浪遭遇角;λ为波浪波长;CWaX(λ),CWaY(λ)和CNWa(λ)分别为x和y方向上的波浪漂移力系数以及绕z方向上的波浪漂移力矩系数。
海流的作用力可由以下经验公式[7]得到:

式中:ρ为海水密度;Asw为水线以下船舶侧投影面积;Afw为水线以下船舶正投影面积;Vc为海流的速度;β为海流入射角;Ccx(β),Ccy(β)和Ccn(β)分别为海流力及海流力矩系数,可以通过下式得到:

式中CL,CD和CN分别为船体的升力系数、阻力系数和转矩系数。
3.3 舵桨数学模型
舵桨是推进器的一种类型。螺旋桨的推力和转矩的数学模型[3]可表示为

式中:tP为推力减额系数;ρ为海水密度;n为螺旋桨转速;DP为螺旋桨直径;KT(JP)为推力系数;Jp为进速系数;KQ为转矩系数。
进速系数可表示为

式中:u为船舶的纵向速度;wP为螺旋桨的伴流系数;KT和KQ可由螺旋桨的敞水试验获得。

式中:tR为舵阻力减额系数;xR为舵中心到船舶重心的纵向距离;aH为操舵导致船体横向力的修正因子;δ为舵角。

式中:λ为展弦比,仅适用λ=0.5~3.0;Ad为舵叶面积;UR为舵处来流有效流速;aR为舵处来流有效冲角。
3.4 推力分配策略
推力分配策略的好坏直接影响到推进器对控制器指令的反应,进而对动力定位效果产生直接影响。本系统采用经过优化的序列二次规划法[8]进行推力分配,具体策略如下:


式中:W为总消耗能量;P为权值,用来调节优化目标;s'Qs为惩罚指令推力和产生的广义推力的误差;Tmin和Tmax分别为推力的上下限;ΔTmin和ΔTmax分别为推力变化幅值;(α-α0)Ω(α-α0)表示角位变化范围;权值矩阵Ω>0用来调节优化目标;式中第4项主要用来避免奇异结构,ε>0避免数值问题,δ≥0为权值参数,实际应用中可根据不同环境情况调节δ参数。
4 动力定位仿真原理
4.1 仿真流程
通过计算机模拟出船舶传感器检测到的各种数据,然后计算船舶当前位置与目标船位的偏差以及环境变量 (风、浪、流)对船舶位置及首向的影响,通过控制算法计算出使船舶恢复到目标位置所需的推力,并通过推力分配逻辑对各推力器的推力进行分配,确定各推力器的推进方向、螺距及转速,进而推力器产生推力使船舶保持目标航向和船位。所有数据均由计算机模拟,通过界面编程实现船舶动力定位过程的动态展现,仿真流程如图4所示。

图4 仿真流程Fig.4 Simulation process
4.2 仿真系统接口设计
仿真系统接口设计是实现仿真系统高级功能的前提,同时提高了仿真系统的可扩展性。本文采用VB与 Matlab混合编程[9]方式实现仿真系统接口功能。
1)模块模型函数标准的建立。这是动力定位仿真系统能够发挥多功能的基础。标准的建立包括函数名称,输入/输出参数名、格式、单位、类型等。
2)模型代码的编写。利用VB或Matlab编写各种模型代码。
3)模型组件的生成。利用ActiveX DLL技术对模型代码进行封装,并通过comtool工具生成COM组件。
4)仿真系统模块的组合。根据仿真需求的不同,选择不同的COM组件,以DLL形式引入嵌入VB中。
4.3 仿真实验
本系统以天津港某大型挖泥船为船模,结合动力定位系统各功能模块,对其动力定位效果做了仿真实验,假定无外界环境干扰情况下,实验定位点为船舶纵荡方向40 m,横荡方向50 m的位置,首向设定为10°,经过一定时间的调整,定位效果如图5所示。

图5 动力定位仿真实验Fig.5 Dynamic positioning simulation experiment
5 结语
围绕船舶动力定位仿真系统的设计,研究了系统的功能、组成、人机界面、数学模型、仿真流程等问题。为增强仿真系统的可扩展性和重用性,从模块模型函数标准的建立、模型代码的编写、模型组件的生成以及仿真系统模块的组合等方面设计仿真系统接口,并用VB与Matlab混合编程实现接口功能。将该系统进一步完善以后可以对船舶动力定位实船实验有一定的指导意义。
[1]史斌杰,吴喆莹.动力定位系统的最近技术进展分析[J].上海造船,2011(3):43 -45.
[2]贾欣乐,杨盐生.船舶运动数学模型-机理建模与辨识建模第1版[M].大连:大连海事大学出版社,1999.
[3]周昭明,盛子寅,冯悟时.多用途货船的操纵性预报计算[J].船舶工程,1983(6):21 -29.
[4]王芳,万磊,徐如玉,等.深水半潜式钻井平台动力定位实时交互仿真系统[J].哈尔滨工程大学学报,2011(11):1396-1401.
[5]ISHERWOOD R M.Wind resistance ofmerchantship[J].Trans.of,RINA,1973,115:327 -338.
[6]DAIDOLA J C,GRAHAM D A,CHANDRASH L.A simulation program for vessel'smaneuvering at slow speeds[C].Proceedings of Eleventh Ship Technology and Research Symposium(STAR),1986.
[7]金鸿章,姚绪梁.船舶控制原理第1版[M].哈尔滨:哈尔滨工程大学出版社,2001.
[8]吴显法,王言英.动力定位系统的推力分配策略研究[J].船海工程,2008(6):92 -96.
[9]谭炎,张凌燕.MATLAB与VB混合编程技术研究[J].软件时空,2006,22(5 -3):247-249.
Simulation design on dynam ic positioning system of vessels
WU Nan,CHEN Hong-wei
(Jiangsu University of Science and Technology,Zhenjiang 212003,China)
In order tomeet the demands of the R&D(research and development),maintenance and operating training in the field of vessel DPS,design such simulation system on the basis of a certain understanding of the DPS home and aboard.Study the function,organization,man-machine interface and simulation procedure of the DPS,and design the simulation system interface from the following aspects,such as the function standard of themodule,andmodel componentbuilding,etc.Apply VB and Matlab to program the interface function,it improves the capacity of expansion and repeated application.The system also needs improving in early-warning processing and breakdown diagnoses.
dynamic positioning;simulation system;interface programming;man-machine interface
U661.3
A
1672-7649(2013)05-0103-04
10.3404/j.issn.1672-7649.2013.05.024
2012-09-29;
2012-11-07
吴楠(1987-),男,硕士研究生,研究方向为船舶自动化。
