高压直流输电中换流器保护电路的仿真分析
2013-03-03杜欣慧胡殿霞
杜欣慧,胡殿霞
(太原理工大学 电气与动力工程学院,山西 太原030024)
高压直流输电是一个庞大而又复杂的系统,换流站保护电路的设计关系到电力系统的安全稳定运行 .我国于50年代开始对直流输电技术进行研究,发展曲折而缓慢,从制造水平及二次设备的维护来看,与世界先进水平的差距还很大.因此,对换流器保护电路的方案设计和对其故障恢复性的研究刻不容缓[1].换流器的故障分为主回路和控制系统故障,故障类型包括换流器交流侧或直流侧各个接线端短路(如阀短路)、接线对地短路(如交流侧单相接地短路)、触发系统出发脉冲丢失等[2].不同类型的故障会导致不同程度上的过电压和过电流.换流站作为高压直流输电中重要的整流、逆变电路,除了电力电子器件参数选择合适,驱动电路设计良好外,采用合适的过电压和过电流保护也是十分必要的[3].本文根据换流器的故障类型,分析了晶闸管过电压、过电流产生的原因,在MATLAB仿真软件上搭建12脉波高压直流输电模型,并设计阻容缓冲电路和基于模糊PI控制的电子保护电路.
1 晶闸管换流器的保护
晶闸管换流器有2种保护电路:一种是安装阻容(RC)缓冲器、限流电感、快速熔断器、压敏电阻或硒堆等保护器件于合适的位置;另一种是使用电子保护电路,当检测到的输出电压或输入电流超过控制值时,利用换流触发控制系统使换流器短时间内运行于有源逆变状态,以抑制过电压或过电流的数值.
1.1 过电流保护
换流器产生过电流的原因有两类[4-6]:一类是换流电路内部故障;另一类是换流桥负载外电路发生短路.对于第一类过电流,最常用的是在需要的部位接上快速熔断器;而对第二类过电流,可采用电子电路进行保护,其保护原理如图1所示.
1.2 过电压保护
晶闸管换流器在运行时,会产生由交流供电电网进入或退出的操作过电压(分合闸时引起的过电压)和雷击过电压,并且设备自身运行及非正常运行时也会产生换相过电压.产生过电压的根源不能消除,必须采用过电压保护抑制晶闸管上可能出现的过电压.过电压保护方法有并联阻容缓冲器及电子电路保护两种方法.
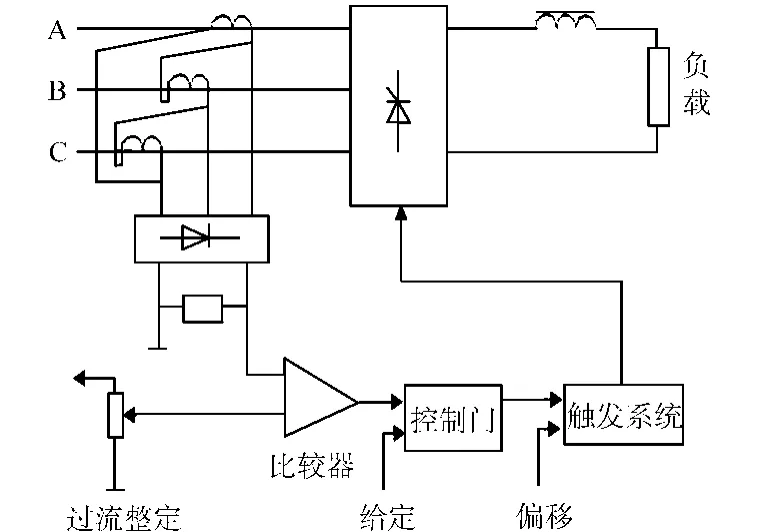
图1 过电流电子电路保护原理图Fig.1 Principle diagram of over-current electronic circuit protection
1.2.1 并联阻容缓冲器 电容两端电压不能突变,可以使其吸收晶闸管关断引起的尖峰过电压[7-8].串联电阻能阻尼电感电容电路振荡并抑制晶闸管开通损耗及电流上升率;阻容缓冲器还具有对高次谐波干扰电压滤波的作用.
1.2.2 电子电路保护 采用电子电路进行保护的原理与过电流保护的电子保护电路相同,不同在于此过电压保护电路是将测量电压与整定值相比较.
2 换流器保护电路设计
2.1 阻容吸收回路的设计
增加电容值可降低振荡频率,根据运行经验取电容值为0.1μF时,可将振荡频率f限制在150 Hz以下.阻尼元件R会干扰系统的振荡频率,根据经验值,R值应取不小于100Ω.R值高有利于保护电容,防止其过载时烧毁,故高安全性的阻容吸收装置都会适当增大R值;但R值太大,会大大提高时间常数,延长暂态时间,影响保护的高效性.因此,在整流器环节采用的2个6脉波的三相全控桥中的阻容缓冲器的最优参数R=400Ω,C=0.2μF.
2.2 电子保护电路的设计
根据换流站中晶闸管过电压、过电流电子保护电路的原理,利用定电流控制实现对整流器触发脉冲的控制,其控制原理如图2所示.定电流控制的工作原理是把输出电流和指令电流进行比较,当出现偏差时,通过一个闭环控制器调节换流器触发角,使其控制直流电流以使电流差值减小或消失,以保证输出电流等于或接近于指令值.
在调节器部分采用了模糊PI控制,模糊自适应PI控制器结构如图3所示.Fuzzy-PI控制器主要由模糊化、知识库、模糊推理、逆模糊4部分组成[9-10].模糊参数调节器根据不同的输入e,ec,运用模糊推理规则计算出Δkp和Δki,可以得到

而Δkp,Δki和e,ec具有下列函数关系,即


图2 定电流控制原理图Fig.2 Principle diagram of constant current control
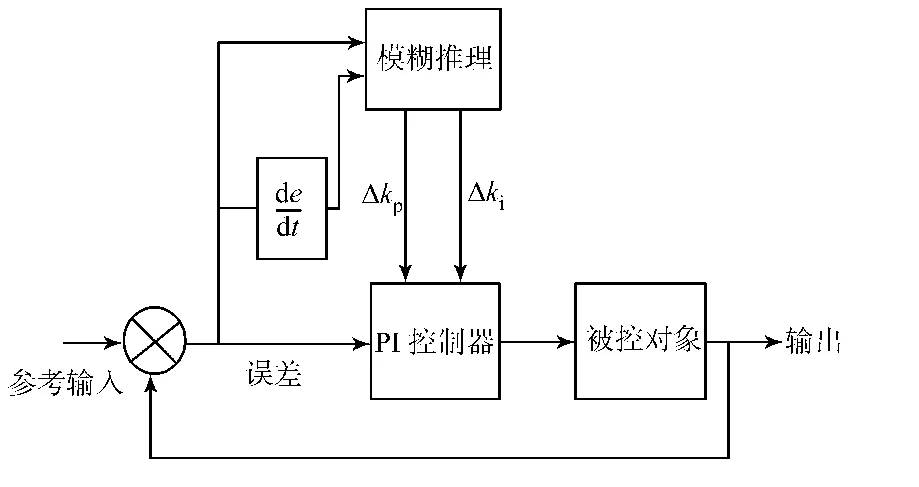
图3 模糊自适应PI控制器结构图Fig.3 Structure of adaptive fuzzy PI controller
模糊化是把输入输出变量的值分为7个语言值,即{NB,NM,NS,O,PS,PM,PB},用三角形隶属函数把电流偏差及其变化率的论域分为{3,2,1,0,1,2,3};输出控制的变化量 Δkp的论域为{0.3,0.2,0.1,0,0.1,0.2,0.3},Δki的论域为{0.06,0.04,0.02,0,0.02,0.04,0.06}.
为求取最终精确量和计算输出控制量,采用重心法清晰化,并结合式(1)~(4)可得

根据PI控制的规则,可得

式(7)中:Id(t)为直流侧的电流;Ids为整定电流值.
由此,把式(4),(5)带入式(6),结合直流输电系统的动态方程,可得整流侧模糊自适应PI控制器的解析式.
3 仿真结果与分析
搭建的高压直流输电系统整体仿真模型(逆变侧等效),如图4所示.模糊自适应PI控制器仿真结构图,如图5所示 .当系统中阻容缓冲器的器件保护和过电流电子电路的控制系统保护排列组合,且系统在0.6~0.7 s之间发生A相交流接地故障时,可得到6种运行方式,如表1所示.

图4 高压直流输电整体仿真模型图Fig.4 Whole simulation model diagram of high voltage direct current

图5 模糊自适应PI控制器仿真结构图 Fig.5 Simulation model diagram of fuzzy adaptive PI controller

表1 仿真情况分类Tab.1 Simulation case classification
在运行方式1,2下,不带保护的晶闸管之间发生短路,换流站出现故障.晶闸管在失去阻容缓冲器的保护后,由于晶闸管静态伏安特性的分散性,使得每个晶闸管承受的电压不均.晶闸管的断态电压临界上升率的特性,是指晶闸管在额定结温和门极断开条件下时,其从断态转入通态的外加电压最高电压上升率;若电压上升率超过了晶闸管的断态电压临界上升率的值,则会在无门极信号的情况下误开通.因此,系统在不加保护时,其运行性能受到影响.
在运行方式3~6下,经MATLAB软件仿真得到的波形图,如图6~9所示.图6~9中:Ud反应的是稳态时输出电压;Id为直流输出电流与2 000的比值;Idref为电流参考值;α为晶闸管的触发角.
从图6~9中可看出:稳态时,输出电压为500 k V,输出电流显示为指令值和测量值的跟踪情况,触发角范围为(10°,25°),故定触发角值设置为20°.根据系统在0.3~0.4 s之间发生扰动和在0.6~0.7 s之间发生A相交流接地故障,其故障时采集数据如表2所示.

表2 整流侧电流波形典型数据Tab.2 Typical data of current of rectifier
从仿真结果可看出:在定触发角控制时,即使器件全加上保护,系统的跟随性和扰动超调量也很大;运行方式3比运行方式5具有更好地故障后的系统恢复性,说明阻容缓冲器对故障过电压的抑制作用.定电流控制即过电流保护电路较之定触发角控制具有更好的响应特性,即跟随性更好,受到扰动后有更快的恢复性和更高的响应准确度,并且超调量也更小.
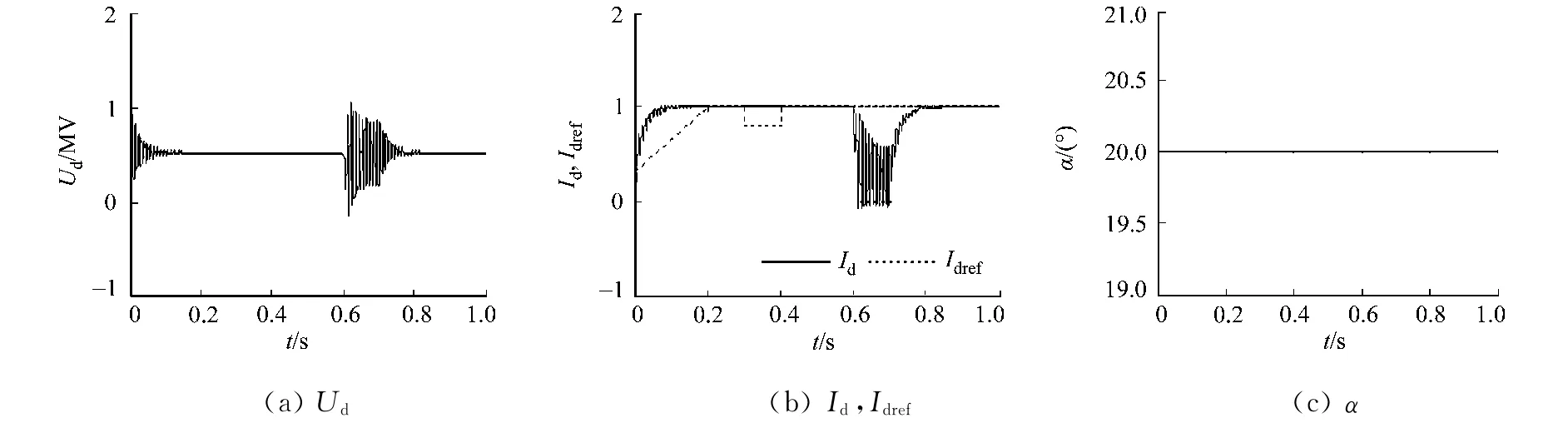
图6 运行方式3的直流输出波形Fig.6 Direct current output waveform of operation mode three

图7 运行方式4的直流输出波形Fig.7 Direct current output waveform of operation mode four

图8 运行方式5的直流输出波形Fig.8 Direct current output waveform of operation mode five

图9 运行方式6的直流输出波形Fig.9 Direct current output waveform of operation mode six
基于模糊PI控制的定电流控制动态性能较好,不但可以改善直流输电的运行性能,而且也可以限制过电流,并使因故障引起的损害达到最小.同时,当系统发生故障时,它又能快速限制暂态的故障电流值,以保护晶闸管换流阀及换流站的其他设备.运行方式4在电压、电流的波动范围上比运行方式6更小些,故障超调量有所降低,系统输出更精确,响应更好.
综合各种运行方式,可看出运行方式4的控制效果最优.
4 结论
针对晶闸管在故障时产生不同程度的过电压与过电流,设计了对晶闸管的保护电路 .无论是对器件本身的保护,还是电子保护电路,都能抑制系统在故障时产生的过电压和过电流的数值,降低换流器故障对系统造成的影响.
阻容缓冲电路使系统跟随性更好,系统超调量得到改善;基于模糊PI控制的电子保护电路使系统具有良好的暂态和稳态特性,其跟踪性能和抗干扰能力增强,保证了高压直流输电系统的正常、可靠和稳定运行.
[1] 姜姝.HVDC换流器故障分析及保护原理研究[D].广州:华南理工大学,2010:2-3.
[2] 韩民晓,文俊,徐永海.高压直流输电原理与运行[M].北京:机械工业出版社,2008:152-155.
[3] 王兆安,黄俊.电子电子技术[M].北京:机械工业出版社,2008:37-40.
[4] 田杰.高压直流控制保护系统的设计与实现[J].电力自动化设备,2005,25(9):10-14.
[5] 张颖,邰能灵,徐斌.高压直流输电系统阀短路保护动作特性分析[J].电力系统自动化,2011,35(8):97-102.
[6] 吴振峰.喷管精锻中频感应加热控制系统关键技术研究[D].武汉:华中科技大学,2005:26-28.
[7] 郝勇,刘云霞,曾继伦.基于指数恢复模型的晶闸管阻容吸收参数设计[J].电气技术,2010(2):20-23.
[8] DASH P K,SAMANTRAY S R.Phase selection and fault section identification in thyristor controlled series compensated line using discrete wavelet transform[J].Electrical Power Energy Systems,2004,26(9):725-732.
[9] 朱良红,王永初.模糊与积分混合控制器[J].华侨大学学报:自然科学版,2003,24(3):285-289.
[10] 柳在鑫,王进戈,朱维兵,等.双圆弧优化算法的足球机器人路径规划[J].华侨大学学报:自然科学版,2008,29(2):190-193.
