基于虚拟样机技术的某减速器动态特性仿真分析
2013-02-28杨高宏
杨高宏
(山西机电职业技术学院,山西 长治 046011)
基于虚拟样机技术的某减速器动态特性仿真分析
杨高宏
(山西机电职业技术学院,山西 长治 046011)
本文首先借助三维建模软件PRO/E和虚拟样机软件ADAMS建立了某减速器的虚拟样机模型,然后对模型进行动态特性仿真,最后将仿真结果和理论计算进行比较,从而证明了基于虚拟样机技术的机械传动系统动态特性仿真分析的可行性。
减速器;虚拟样机;动态特性;仿真
本文首先借助三维建模软件PRO/E建立了某减速器的三维模型,然后通过软件MECHANISM/PRO将模型导入至ADAMS中。在ADAMS中给模型定义驱动、载荷和约束等,从而完成虚拟样机模型的建立。最后对模型进行动态特性仿真分析,通过将仿真结果和理论计算进行比较,说明了基于虚拟样机技术的机械传动系统动态特性仿真分析的可行性。
1 虚拟样机模型的建立
1.1 三维模型的建立
本文利用CAD软件PRO/E建立了某减速器实体模型,如图1所示。减速器各齿轮参数如表1。

图1 某减速器三维实体模型(内齿圈等隐藏)

表1 减速器齿轮各参数表
1.2 虚拟样机模型的建立
通过软件MECHANISM/PRO将模型从PRO/E导入至ADAMS中。在ADAMS中给模型定义驱动、载荷和约束等,从而完成虚拟样机模型的建立。
2 虚拟样机模型的动态特性仿真分析
2.1 齿轮转速的仿真分析
首先对虚拟样机模型进行仿真参数的设定,设定小锥齿轮轴输入转速为180 r/min(1 080°/s),两边行星架负载扭矩为25 000 n·m。现分别提取输入轴、大锥齿轮轴和左端的输出轴转速曲线,如图2、3、4所示。由表2数据可以得出:各级齿轮转速仿真值和理论值相对误差很小,由仿真得到的传动比和理论计算传动比也很相近,从而可以说明该虚拟样机模型满足齿轮传动比的要求。

图2 输入轴转速曲线
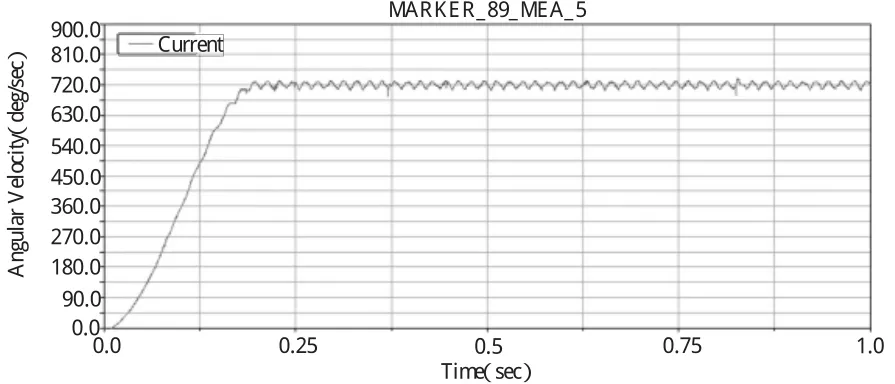
图3 大锥齿轮轴转速曲线

表2 转速和传动比仿真值与理论值对比
2.2 齿轮啮合力的仿真分析
本文分别提取了左端太阳轮与行星轮啮合力时域频域和左端内齿圈与行星轮啮合力时域频域,如图5、图6所示。由图5时域图可知,左端太阳轮与行星轮啮合力的平均值为3 2853.9 N,与理论计算值33068.8相当接近,相对误差0.65%。由图5、图6频域图可知,左端太阳轮与行星轮啮合力在26.97 Hz频率点幅值最大,即啮合频率为26.97 Hz,而左端内齿圈与行星轮啮合力在27.02 Hz频率点幅值最大,即啮合频率为27.02Hz,这均与它们的理论啮合频率27.0Hz相当接近,进一步说明了仿真结果是正确的。

图5 左端太阳轮与行星轮啮合力时域频域图

图6 左端内齿圈与行星轮啮合力时域频域图
3 结束语
本文借助虚拟样机技术对某减速器进行了仿真,并将仿真结果和理论计算进行了比较,结果基本吻合,从而说明了基于虚拟样机技术的机械传动系统动态特性仿真分析是可行的。
[1]钟建琳.Pro/E零件造型实用教程[M].北京:机械工业出版社,2001,2-3.
[2]田会方,林喜镇,赵恒.基于Pro/E和ADAMS齿轮啮合的动力学仿真[J].机械传动,2006,30(06):66-69.
[3]芮执元,程林章.基于Pro/E与ADAMS结合的虚拟样机动态仿真[J].现代制造工程,2005,(01):56-57.
[4]李金玉,勾志践,李媛.基于ADAMS的齿轮啮合过程中齿轮力的动态仿真[J].机械,2005,32(3):15-17.
Simulation Analysis of Dynam ic Characteristics of a Reducer based on VirtualPrototype Technology
YANGGao-hong
(Shanxi Institute ofMechanicaland Electrical Engineering,Changzhi,Shanxi046011,China)
Firstly,using 3Dmodeling software PRO/E and the virtual prototype software ADAMS to establish the virtual prototype model of a reducer,and then the dynamic characteristics simulation of the model,finally compares the simulation results and theoretical analysis,which proves the feasibility ofmechanical transmission system dynamic characteristic simulation based on virtualprototype technology.
reducer;virtualprototype;dynamic characteristics;simulation
TG76
A
1672-545X(2013)04-0261-02
2013-01-07
杨高宏(1979—),男,山西武乡人,主要从事机械故障诊断,信号处理,机械系统动态仿真。
