基于网格剖分的协方差交集融合新算法❋
2013-02-25王前东罗泽举彭鸣
王前东❋❋,罗泽举,彭鸣
(中国西南电子技术研究所,成都 610036)
其中,公式(15)表示航迹点1的位置(x,y)为(0,10),其变化的均方根误差为(20,60);公式(16)表示航迹点2的位置(x,y)为(10,0),其变化的均方根误差为(60,20)。
从公式(15)与公式(16)可以看出:两航迹点的X、Y位置误差是矛盾的,航迹点1的X位置误差比航迹点2的小,航迹点2的Y位置误差比航迹点1的小,认为航迹点1的X位置比较准确,航迹点2的Y位置比较准确。
文献[2]方法(协方差交集融合1误差椭圆)与本文方法(协方差交集融合2误差椭圆)的融合误差椭圆如图1所示。
2所示。从图中可以看出,航迹点1与航迹点2误差椭圆差不多时,本文方法的均值与航迹点1与航迹点2均值的平均值接近,误差椭圆能很好逼近航迹点1与航迹点2的协方差椭圆的交集。
当两局部航迹噪声完全相关,噪声分布在真实航迹两边,经50次蒙特卡罗仿真统计协方差凸组合融合、文献[2]的协方差交集融合、网格剖分的协方差交集融合方法(网格步长5 m)的均方根融合误差,如图4所示。
基于网格剖分的协方差交集融合新算法❋
王前东❋❋,罗泽举,彭鸣
(中国西南电子技术研究所,成都 610036)
针对协方差交集的最优融合问题,提出了一种基于网格剖分的协方差交集融合新算法。该算法首先利用几何法对位置空间进行网格剖分,求出局部航迹协方差椭圆所包含的网格集合;其次,对所有的网格集合进行与运算,求出局部航迹协方差椭圆所包含的公共网格集合;最后,利用公共网格集合逼近协方差椭圆的交集,求出融合估计值。蒙特卡罗仿真试验证明,该方法能有效提高相关误差航迹的融合精度。
协方差交集;分布式融合;网格剖分
1 引言
分布式航迹融合能够减少通信带宽,增加融合航迹的稳定性,在工程技术中得到了广泛的应用。目前,分布式融合已经发展了很多算法,文献[1-6]对协方差组合方法进行了讨论。一般地,协方差凸组合算法没有考虑局部航迹的相关性,抗干扰能力较弱,造成其算法的鲁棒性较差,仅仅在局部航迹完全独立的情况下是最优的。互协方差组合、信息矩阵及基于最优线性无偏估计的BLUE算法需要利用先验信息,当先验估计信息未知或不准确时,各算法都是次优算法。
当分布式系统中有很多冗余信息时,多源信息间的相关信息无法描述,传统的贝叶斯估计方法无法解决这种问题。基于这种情况,文献[2-3,7-8]讨论了一种以协方差交集为理论基础的分布式融合方法。协方差交集是一种保守融合方法,无论局部航迹之间的相关性如何,都可以用一个协方差椭圆逼近局部航迹的协方差椭圆的交。
协方差交集类方法的重点与难点是求两个协方差椭圆的交集,文献[2-3]用优化的方法近似求出椭圆的交集,本文从工程实际出发,直接用几何方法求出两个椭圆的交集,几何方法就是用网格剖分两个椭圆,则两个椭圆交集为交集内的网格,因此只需求出交集内的网格就可以求出两个椭圆的交集。这种处理方法具有很好的鲁棒性,能够满足工程应用的可靠性要求。
2 协方差交集算法介绍[2]
假设有两条信息,分别记为A和B,将它们融合得到一个信息C,用随机变量a和b分别表示A和B,其均值与协方差估计值分别为{a,paa}和{b,pbb}。

假设估计的唯一约束条件就是一致性:

问题变成了融合A和B的一致性估计值,从而得到一个新的估计值C,{c,pcc},并且满足下面一致性约束:

一般情况下,协方差交集是对均值和协方差估计的一个凸组合,其算法过程为
其中,0≤ω≤1,自由参数ω决定了分配给a和b的权值,根据不同的标准可以选择使用不同的ω来优化改进方法,相对于ω为凸的代价函数在0≤ω≤1间只有一个明确的最优值。事实上,从牛顿-拉夫逊法到复杂半正定和凸规划技术,有很多最优化策略可以使用。文献[2]提供了一个优化pcc行列式最小的算法代码,其算法为

从上述协方差交集算法过程中可以看出,通过{a,paa}和{b,pbb},可以在不清楚状态值之间的相关度Pab时,也能给出一个改进的预测值。
3 基于网格剖分的协方差交集融合算法
一般地,协方差的凸组合仍然是凸的,于是协方差交集可以通过椭圆的交求出,求解步骤如下所述。
(1)网格剖分
将平面划分为边长h的矩形网格,位置(xi,yj)与网格π(i,j)的映射关系如下:

其中,(x0,y0)为平面坐标原点。
(2)协方差椭圆表示
设点(x,y)的均值与协方差矩阵分别为(¯x,¯y)与珔pxy,当网格π(i,j)对应的位置(xi,yj)落在协方差椭圆内的充要条件为满足如下公式:

其中,k为指定常数。


(3)协方差椭圆交集的表示

(4)融合估计值的求法
令

则I、J分别表示为x、y方向协方差交集剖分的网格单元πi,j下标集合。则估计值为

4 数字仿真试验
4.1 协方差交集仿真分析
设航迹点1与航迹点2的均值与协方差分别为
其中,公式(15)表示航迹点1的位置(x,y)为(0,10),其变化的均方根误差为(20,60);公式(16)表示航迹点2的位置(x,y)为(10,0),其变化的均方根误差为(60,20)。
从公式(15)与公式(16)可以看出:两航迹点的X、Y位置误差是矛盾的,航迹点1的X位置误差比航迹点2的小,航迹点2的Y位置误差比航迹点1的小,认为航迹点1的X位置比较准确,航迹点2的Y位置比较准确。
文献[2]方法(协方差交集融合1误差椭圆)与本文方法(协方差交集融合2误差椭圆)的融合误差椭圆如图1所示。
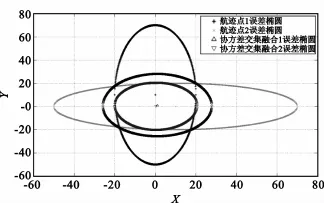
图1 两点位置矛盾时协方差交集椭圆逼近比较Fig.1 Covariance intersection ellipse comparison of the conflict position estimations
从图1可以看出,本文方法与文献[2]方法融合的均值一样,误差椭圆能很好逼近航迹点1与航迹点2的协方差椭圆的交集,且比文献[2]方法误差椭圆小。
设航迹点1与航迹点2的均值与协方差分别为
从公式(17)与公式(18)可以看出:两航迹点的X、Y位置误差是一致的,航迹点1的位置误差都比航迹点2的略小,认为航迹点1的X位置与Y位置略准确。
完成水土保持投资34.4万元,其中工程措施投资33.94万元,植物措施投资0.46万元,比水保方案减少51.88万元,主要原因是大磨河弃渣场工程建设期间由于弃渣量减少,工程占地减少,且渣顶建管理房,功能发生变化,将原方案设计的铅丝石笼挡墙、护坡、护顶变更为铅丝石笼护脚、浆砌石挡墙及护坡,但防护长度、高度、防护面积均比原水保方案减少,工程量的减少造成工程投资降低。
文献[2]方法与本文方法的融合误差椭圆如图
2所示。从图中可以看出,航迹点1与航迹点2误差椭圆差不多时,本文方法的均值与航迹点1与航迹点2均值的平均值接近,误差椭圆能很好逼近航迹点1与航迹点2的协方差椭圆的交集。
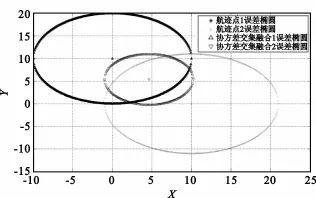
图2 两点位置一致时协方差交集椭圆逼近比较Fig.2 Covariance intersection ellipse comparison of the consistent position estimations
4.2 融合算法蒙特卡罗仿真
假设目标先以150 m/s的速度做100 s匀速运动,然后以角速度1°/s的速度做100 s匀速转弯运动,最后以0.1g的加速度做100 s匀加速运动。目标运动真实轨迹如图3所示。
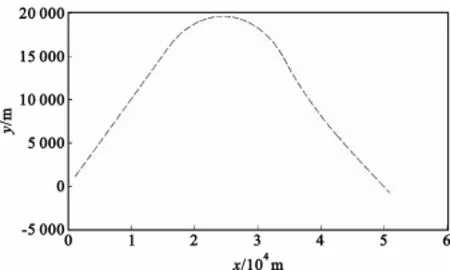
图3 目标真实航迹Fig.3 The true track of the object
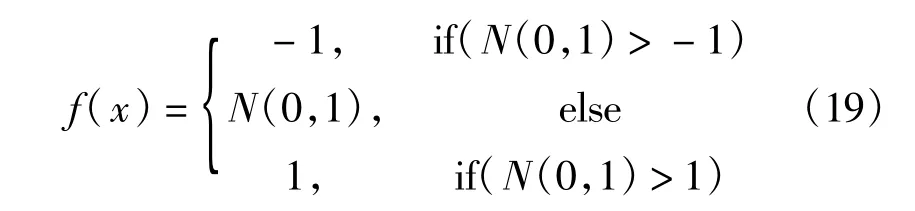
现假设有两个局部航迹,噪声分别为50 m、100 m的正态截尾噪声。标准正态截尾噪声如下式所示:
当两局部航迹噪声完全相关,噪声分布在真实航迹两边,经50次蒙特卡罗仿真统计协方差凸组合融合、文献[2]的协方差交集融合、网格剖分的协方差交集融合方法(网格步长5 m)的均方根融合误差,如图4所示。
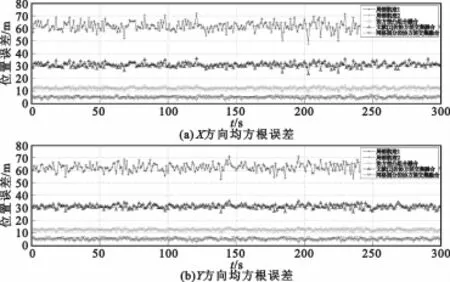
图4 相关噪声融合均方根比较Fig.4 RMSE comparison of the fusion position in correlated noise
从图4可以看出,当噪声完全相关时,网格剖分的协方差交集融合比协方差凸组合、文献[2]的协方差交集融合的方法都好;文献[2]的协方差交集融合已经退化为最高局部航迹融合精度。
当两局部航迹噪声完全独立,经50次蒙特卡罗仿真统计协方差凸组合融合、文献[2]的协方差交集融合、网格剖分的协方差交集融合方法(网格步长5 m)的均方根融合误差,如图5所示。
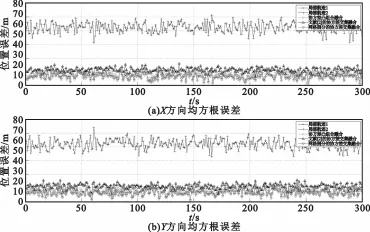
图5 独立噪声融合均方根比较Fig.5 RMSE comparison of the fusion position in independent noises
5 结论
本文针对协方差交集融合中椭圆逼近问题进行了探索,利用网格剖分技术求协方差交集,详细推导了相应的计算过程,并用MATLAB软件进行了蒙特卡罗仿真验证。仿真结果表明:网格剖分的协方差交集融合方法比文献[2]与协方差凸组合方法好。
本文采用的是网格剖分的方法,算法比较稳定。实际应用中,如果网格步长过小,该方法计算量较大,一般需根据局部航迹精度进行调整,以减少计算量。
[1]乔向东,李涛.多传感器航迹融合综述[J].系统工程与电子技术,2009,31(2):245-250. QIAO Xiang-dong,LI Tao.Survey of Multi-sensor Track Fusion[J].Systems Engineering and Electronics,2009,31(2):245-250.(in Chinese)
[2]杨露菁,耿伯英.多传感器数据融合手册[M].北京:电子工业出版社,2008. YANG Lu-jing,GENG Bo-ying.Handbook of MultiSensor Data Fusion[M].Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[3]Shen Xiaojing,Zhu Yunmin,Song Enbin,et al.Minimizing Euclidian State Estimation Error for Linear Uncertain Dynamic Systems Based on Multisensor and Multi-Algorithm Fusion[J].IEEE Transactions on Information Theory,2011,57(10):7131-7146.
[4]Bar-Shalom Y.On Hierarchical Tracking for the Real World[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(3):846-850.
[5]Saha R K,Chang K C.An Efficient Algorithm for Multisensory Track Fusion[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(1):200-210.
[6]Chang K C,Saha R K,Bar-Shalom Y.On Optimal Track-totrack Fusion[J].IEEE Transactions on Aerospace and Electronic Systems,1997,33(4):1271-1276.
[7]Hurely M B.An Information theoretic Justification for Covariance Intersection and Its Generalization[C]∥Proceedings of the 5th International Conference on Information Fusion.Annapolis,MD:IEEE,2002:505-511.
[8]Chong C Y,Mori S.Convex Combination and Covariance Intersection Algorithms in Distributed fusion[C]∥Proceedings of the 4th International Conference on Information Fusion. Montreal,Canada:IEEE,2001:1-9.

王前东(1977—),男,四川西充人,2004年于四川大学获硕士学位,现为高级工程师,主要从事情报数据融合处理研究;
WANG Qian-dong was born in Xichong,Sichuan Province,in 1977.He received the M.S. degree from Sichuan University in 2004.He is now a senior engineer.His research concerns data fusion in intelligence system.
Email:wangqiandong@sohu.com
罗泽举(1979—),男,四川成都人,高级工程师,主要从事系统总体工作;
LUO Ze-ju was born in Chengdu,Sichuan Province,in 1979. He is now a senior engineer.His research concerns system design.
彭鸣(1978—),男,湖北安陆人,高级工程师,主要从事系统总体工作。
PENG Ming was born in Anlu,Hubei Province,in 1978.He is now a senior engineer.His research concerns system design.
A New Covariance Intersection Fusion Algorithm Based on Grid Partition
WANG Qian-dong,LUO Ze-ju,PENG Ming
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
Aiming at the optimal fusion of the covariance intersection algorithm,a new covariance intersection algorithm based on the grid partition is presented for position fusion.Firstly,the position area is partitioned into many small rectangle grids by geometric method and the error ellipse of the local track is transformed into the set of the rectangle grids.Secondly,the common grids set are computed by logic and operation for the set of the rectangle grids.Finally,the optimal approximation for the covariance ellipse of the fusion estimation is computed by the common grids set and the estimated value of the fusion track is calculated by the common grids set.The Monte Carlo simulation shows the method can improve the precision of fusion track.
covariance intersection algorithm;distributed fusion;grid partition
wangqiandong@sohu.com
TN957.52
A
1001-893X(2013)05-0588-04
10.3969/j.issn.1001-893x.2013.05.012
2012-10-15;
2013-03-29 Received date:2012-10-15;Revised date:2013-03-29
❋❋
wangqiandong@sohu.com
