CORDIC 算法在正余弦函数中的应用及其FPGA 实现
2013-02-22常柯阳曾岳南覃曾攀
常柯阳,曾岳南,陈 平,覃曾攀
广东工业大学 自动化学院,广州510006
1 引言
正余弦函数在众多工程应用的场合非常广泛,就典型的采用空间矢量控制方法的电机控制系统来说,坐标变换模块就需要正余弦函数的实时参与。而在电机控制芯片的发展方面,现场可编程逻辑器件(FPGA)[1]以其速度、灵活性、可靠性和集成度而逐渐受人瞩目。
由于计算精度与存储容量的突出矛盾[2],在存储资源有限的FPGA 芯片中,常用的查找表方法没有优势;而CORDIC 算法,仅需通过移位与加减运算和占用少量的存储资源,因此能够方便地在硬件中实现。但该算法过程复杂,迭代次数较多,输出时延较长,占用的硬件资源较多。因此,本文提出了一种查找表与CORDIC 相结合的算法,结合两者的优势,在保证精度的前提下优化了算法的输出时延和资源消耗,并在QuartusII 7.2 开发环境下完成了算法的设计、仿真和硬件测试。
2 查找表法和传统CORDIC 算法介绍
2.1 查找表算法原理
查找表算法的原理是根据计算精度要求,先把一个周期内的正余弦函数分为若干个点,分别求出对应点的函数值,并将结果写入芯片存储器中。然后,再通过适当的运算将输入角度与存储器地址对应起来,从而查表获得结果。
用查找表[2]方法实现函数的计算,虽然没有输出时延,但其精度和表的容量是指数关系的,就势必需要大规模的ROM,这在实际应用中需要占用大量的片上资源,甚至是不可行的。
2.2 CORDIC 算法原理
坐标旋转数字计算机CORDIC(Coordinate Rotation Digital Computer)算法,是由Volder[3]于1959 年提出的,其基本思想是通过一系列与运算基数相关的角度的不断偏摆,从而逼近所需旋转的角度。在圆周模式下,其基本实现形式有两种:旋转计算模式和向量计算模式。计算正余弦函数时,需采用旋转计算模式。在文献[2]中,给出了其基本形式:

其中,xn、yn、zn是当前迭代变量;xn+1、yn+1、zn+1是下一次迭代变量;是符号函数;n是迭代次数。输入,则输出为,其中设增益因子,在n→∞时,K≈0.607 253。算法的角度覆盖范围[4]为(-99.88°~99.88°)。
3 改进型CORDIC 算法
3.1 改进型CORDIC 算法的思想
由上述算法描述可知,CORDIC 算法结构仅需要移位和加减运算,以及n-1 个旋转常量,非常方便在FPGA 中实现。但其迭代次数较多,输出时延大,占用硬件资源较多。考虑到上述因素,本文提出了一种改进型CORDIC 算法,将查找表方法与传统CORDIC 方法相结合。这样,可以利用少部分的存储资源,也能降低迭代次数,节约了硬件资源和降低输出时延。文献[4]虽然提出了这种思想,但并未给出具体的实现方法。
CORDIC 算法是一种逐次逼近的算法:以一个初始向量为出发点,按照一定的逐渐减小的角度值上下摆动,最终逼近真实值。传统的CORDIC 算法,初始向量为X轴,并依次以45°(arctan 20)、26.57°(arctan 2-1)…进行旋转。
如图1,在不考虑增益因子的情况下,待求向量d需经过2 次逆时针旋转和1 次顺时针旋转到达临近向量c。

图1 CORDIC 算法角度逼近示意图
但如果能够知道待求向量d的范围在向量b和c之间,并确切知道c的位置,就可以省略a、b和c三次旋转。对于流水线型结果来说,就可以省略几级流水线;对迭代式结构来说,就可以减少迭代次数,同时降低输出时延。正如图2 中所示,若已知向量d所代表的初始向量对应的坐标为(xi,yi),则可以省略掉前面0~i次运算,仅需要i~n次的运算。与传统算法相比,减少了i次运算,因此能够将输出时延降低i个时钟,并降低一部分硬件资源。但同时,由于要获取初始向量d的坐标信息,相对于传统CORDIC算法,需要占用较多的存储资源,其多少取决于算法的运算次数和精度;但相对于查找表方法[4],其占用的存储资源则要少很多。也就是说[4],改进型CORDIC 算法就是解决了查找表算法占用存储资源大与传统CORDIC 算法输出时延大之间的矛盾;在占用有限存储资源,保证计算精度的情况下,减小了输出时延和硬件资源。
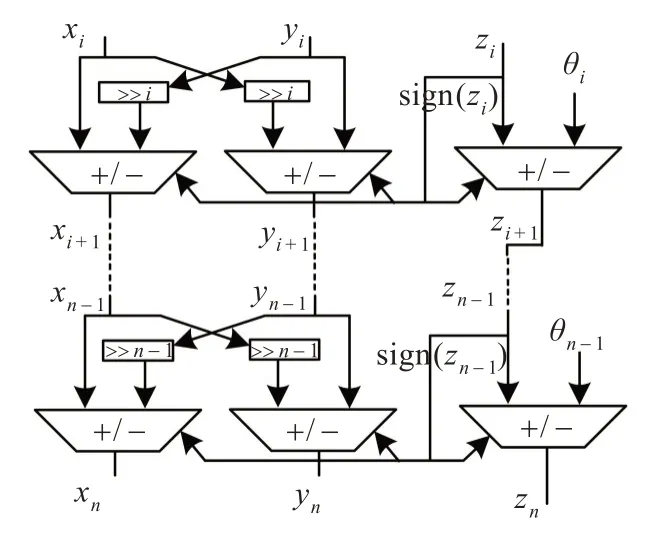
图2 改进型CORDIC 算法结构图
3.2 改进型CORDIC 算法的FPGA 实现
算法实现结构主要分为三个模块:预处理模块、初始向量查找表模块和算法主体及后处理模块。
整个设计过程是在QuartusII 7.2 环境下实现,采用VHDL 语言与.bdf 原理图编写;设计文件内所有数据均采用Q14 格式;而函数floor()表示向负无穷舍入,round()表示向最接近的整数舍入。各模块的作用如下所述。
3.2.1 预处理模块
主要作用:扩展输入角度范围,并获得初始向量查找表地址和剩余需旋转角度。
上文中提到CORDIC 算法的输入角度覆盖范围为(-99.88°~99.88°),所以在计算前,需将输入角度范围扩大为[0 ~2π)。这里对输入角度theta取其对的标么值,如表1 所示。
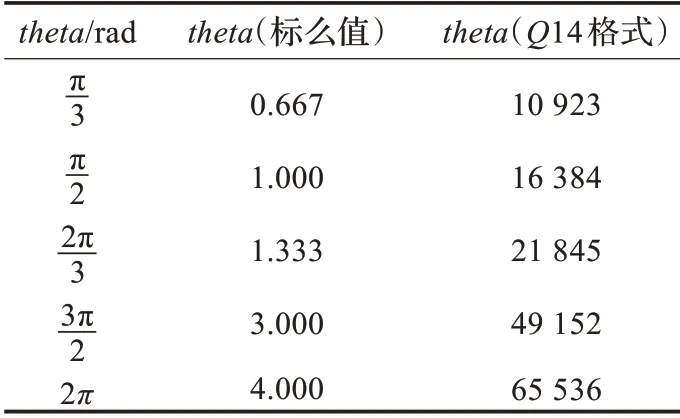
表1 输入角度数据格式
扩展处理方法的伪码如图3。图中,theta_m为处理后的输出角度数据,其范围为;verf为theta的象限状态值,用于主体算法完成后的后处理;addra为余弦查找表地址,范围为[0 ~255];addrb为正弦查找表地址,范围为[0 ~254]。
设计中,初始向量正余弦查找表由一块ROM 存储,地址范围为[0 ~255],存储数据为故。在硬件实现时,仅需将theta_m右移6 位,而;仍需旋转的角度z=theta_m-(addra+1)×26。
3.2.2 初始向量查找表模块
模块功能:根据输入地址查找相应的正余弦值。
利用宏功能模块生成两输入两输出的ROM 模块,其容量为16 bit×256 word。相邻两地址所代表的角度差的标么值的Q格式为
3.2.3 算法主体及后处理模块
模块功能:计算输入角度theta_m的正余弦值,并根据输入象限状态verf对输出结果进行调整,最终得到初始输入角度theta的正余弦值。
流水线级数的确定:角度旋转常量如表2。

表2 角度常量θi=round(arctan(2-i)×214)
故按照传统的CORDIC 算法需要15 级流水线。而由于,故采用改进型算法后,仅需8 级流水线,即在初始向量的基础上摆动8 次就可逼近待求向量。由2.2 节可知,调整因子,文中忽略不计。
后处理部分,是根据verf 进行角度theta 的象限判定,并据此修改输出结果。
将上述三部分连接,即可得到改进型CORDIC 算法(图4)。
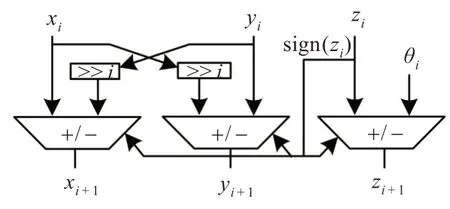
图4 改进型CORDIC 算法的基本单元
4 仿真结果
在QuartusII 7.2 开发环境下对上述设计文件进行仿真。图5 给出了传统算法与改进后算法的仿真结果,其中,输入角度theta是利用Matlab 软件计算得到的:
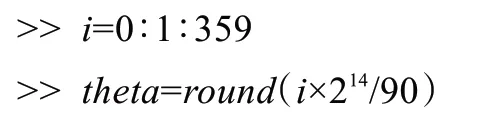
Theta涵盖了[0 ~2π)范围。传统算法的输出结果较改进后算法延迟了7 个时钟。
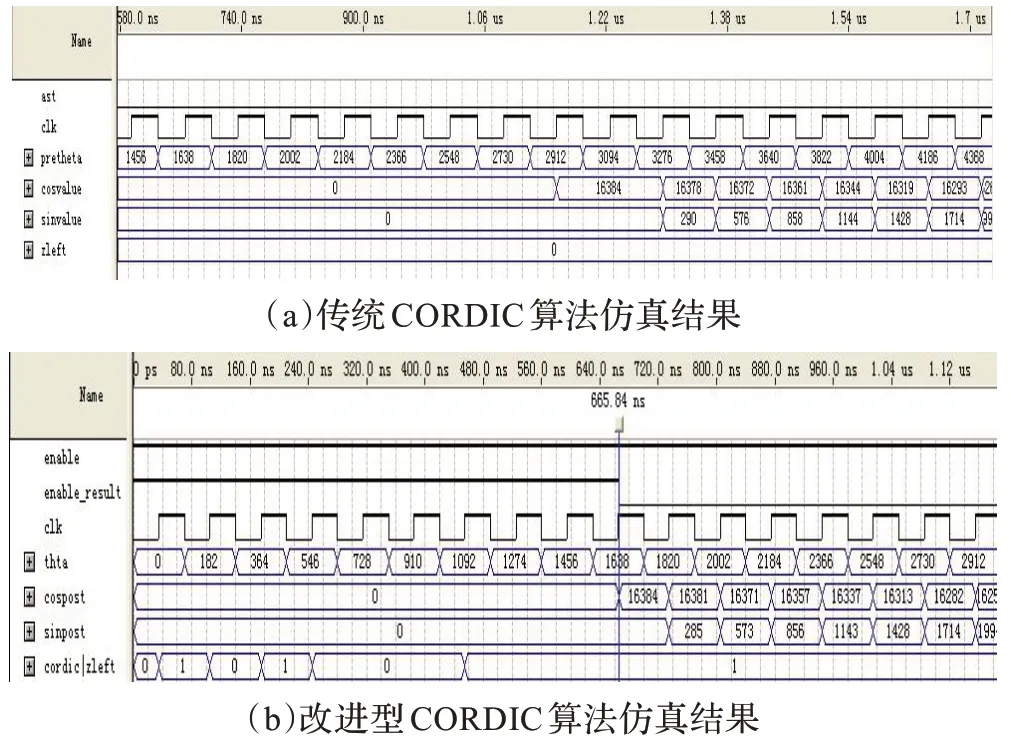
图5 传统与改进型CORDIC 算法仿真结果对比图
将两种算法的仿真数据与Matlab 计算数据作对比,可得[0 ~2π)输入范围内的误差曲线,如图6 所示,其中,叉号和圆圈曲线分别为余弦误差和正弦误差曲线。从图中可以看出,两种算法的误差均在10-4数量级内,改进后算法误差绝对值的最大值0.000 3较改进前0.000 4降低了约25%。
5 实验结果
将上述算法编译下载至Altera 公司CycloneII EP2C70F896C6 芯片。图7 为编译后芯片资源消耗的报告,编译工具为QuartusII 7.2 自带的;表3 将两份报告进行了对比。
图8 显示了使用嵌入式逻辑分析仪对算法进行硬件测试的结果,系统时钟为50 MHz,与仿真结果一致。
6 结论
将查找表算法结构和传统CORDIC 算法结构相结合,提出了一种计算正余弦函数的改进型的CORDIC 算法,并完成了该算法的仿真设计和FPGA 实现。其结果表明本文算法占用的存储资源比查找表算法少,硬件资源比传统CORDIC 算法少,但与传统CORDIC 算法相比,却实现了同等数量级的计算精度,并减低了将近一半的输出时延。将仿真和硬件测试结果与Matlab 计算结果进行了对比,验证了算法的正确性。如果需要更高的计算精度,可以增加算法中计算数据的位宽;而且,精度越高,数据位宽越大,改进后的算法在资源利用方面的优势就越明显。

表3 设计资源消耗及输出时延对比
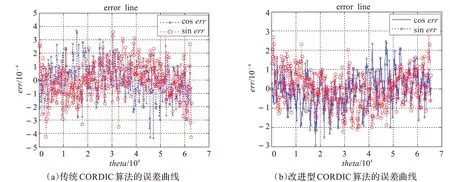
图6 传统与改进型CORDIC 算法误差曲线对比图

图7 传统与改进型CORDIC 算法资源消耗报告

图8 改进型CORDIC 算法硬件测试结果图
[1] 刘辉,邹轩.基于FPGA 和CORDIC 算法的交流电动机直接转矩控制[J].微特电机,2009,37(8):57-60.
[2] 吴恒,王淦泉,陈桂林.CORDIC 算法在基于FPGA 的PMSM 控制器中的应用[J].电机与控制学报,2009,13(1):113-118.
[3] Volder J E.The CORDIC trigonometric computing technique[J].IRE Transactions on Electronic Computers,1959,8(3):330-334.
[4] 孙宇峰,陈国军,王大鸣,等.一种高精度正余弦函数的FPGA实现方法[J].信息工程大学学报,2007,8(3):368-370.
