一种基于OSA 与CS 原理的SAR 成像算法研究
2013-02-22徐涛,吴军,彭芳,秦阳
徐 涛,吴 军,彭 芳,秦 阳
空军工程大学 工程学院,西安710038
在聚束SAR 系统中,人们常常在应用成像算法处理前对原始回波数据进行预处理,回波数据经过预处理后往往会在距离向和方位向上产生高阶系统误差项,对预处理后的回波数据直接进行傅里叶变换会引起图像散焦,降低图像等级。重叠子孔径算法[1](Overlapped Subaperture Algorithm,OSA)对复信号进行分段处理,在对信号进行傅里叶变换过程中,完成信号中高阶误差项的补偿工作。因此可以利用OSA 算法对预处理后的SAR 进行误差补偿,同时完成傅里叶变换。OSA 算法己经成功应用于Sandia 实验室双水獭SAR 系统中,并取得显著的效果。
Chirp Scaling 原理[1]使得不同距离上的目标的频域距离徙动曲线一致化,因此可以准确校正距离徙动,最终实现精确成像。CS 原理还能解决二次距离压缩(SRC)对方位频率的依赖问题。基于Chirp Scaling 原理的CS 算法已经成功地应用于聚束式SAR 系统中。
成像过程中完全使用相位相乘会导致成像精度不够,雷达视角较大时容易造成图像聚焦模糊,如CS 算法。完全使用插值运算虽然会提高成像精度,但会导致运算量过大,影响算法的实用性,而且插值函数选择不合适还会影响成像效果,如PF 与RM 算法。本文从复信号中的频率分辨理论出发,详细介绍了OSA 与CS 的基本原理,并给出OSA 算法具体的实现过程和仿真结果,在CS 原理的基础上,提出将OSA 与CS 原理结合起来应用到聚束式SAR 成像算法中。
1 复信号中的频率分辨率原理
设有复信号f(t)中含有两个相近角频率wr1和wr2的复指数信号,表达式如下:

对f(t)依据奈奎斯特采样定理进行采样,设采样点数为N ,采样频率为ws=2πN/T ,则采样后的离散函数表达式为:

其中,wp1和wp2为数字角频率,取值范围为[-π,π],利用等比数列求和公式求f(n)的傅里叶变换F(s)为:
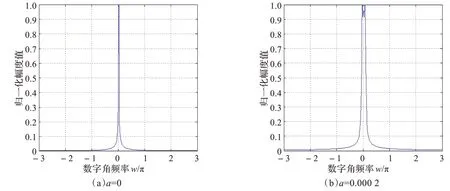
图1 f(n)的傅里叶变换
因为在实际处理中关心两根谱线之间是否能够分开来,所以只需要关心F(s)的幅度大小,c sin cN(x)的包络类似sin c(x)函数,在x=0 时幅度取得最大值,x=±π 时为距离x=0 最近的两个零点,所以主瓣宽度为2π 。而根据FFT 原理的基本原理[2]可以知道,数字角频率的最小分辨单元为ρ=2π/N 。该值为数字角频率的理想分辨率,对应角频率的理想分辨率为,fs为采样频率。
由上可知,如果函数f(n)中wp1和wp2这两个数字角频率相差大于ρ,那么就可以在F(s)中对应两个不同的峰值(即谱线),这样就可以识别出wp1和wp2。但实际处理中因为取样的数据有限,对f(n)进行傅里叶变换时,就会出现频谱泄漏现象,数字角频率的两根谱线将不再是一根直线,而是围绕这个中心频率形成两个很窄的包络。如果f(n)含有高阶误差项,这个包络将会进一步扩展。显然,提高频率分辨率的关键在于减少这个包络宽度。
2 OSA 基本原理与实现
重叠子孔径算法是一个线性处理过程[3],为了不失一般性,假设如下混有高阶误差项的单频率复采样信号:

其中,w0是要提取的数字角频率,ξ(w0,n)是含有的高阶误差函数。这里的ξ(w0,n)主要考虑二次项相位误差。因此在下面的分析中,假定ξ(w0,n) 的表达式为ξ(w0,n)=aw20n2,其中0 <a <1。其他形式的高次误差项处理方法类似,a 为误差加权因子。若a=0,直接对f(n)进行傅里叶变换就可以得到理论分辨率ρ;但一般情况下a ≠0,且远远小于1,设a=0.000 2,N=255,直接对f(n)进行傅里叶变换,变换结果如图1 所示。
由图1 可以看出,f(n)的傅里叶变换在w0处(仿真时进行了平移变标处理,将w0置于频谱中心)形成一个包络,随着a 的增大,这个包络越宽,严重影响了复信号的分辨率。
下面将讨论如何利用重叠子孔径方法来减少包络宽度。定义N 为总孔径长度,把总孔径划分成多个区间,每个区间部分重合,则这样的区间被称为子孔径,划分示意图见图2[4]。
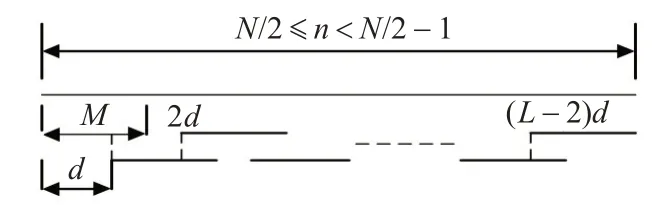
图2 子孔径划分示意图
从图2 可以看出,该孔径被划分成L-2 段,每个子孔径长度M,两个子孔径之间的重合长度为M-d ,则总孔径中的任一点可以表示为:

其中,-M/2 ≤m ≤M/2-1,-L/2 ≤l ≤L/2-1,M 是每个子孔径的长度,L 是N 点数据分成的子孔径的数目,划分合适的情况下有N=L×d,如图2 所示。通过以上划分得到了一个L×M 的重叠子孔径矩阵,如图3 所示。
图3 OSA 矩阵及Wp 的分布图
将式(5)带入式(4)得:

上式就是二维OSA 矩阵的表达式,按m 方向看去,二次项为aw20m2和2aw20ld×m,其引起的最大瞬时频率变化量为aw20M 和2aw20Ld ,因为Ld >M ,所以只要令aw20Ld ≤π/M则aw20ld引起的频率迁徙可以忽略。按第二个参数m进行傅里叶变换得:

由csinc(x)的性质可知,在OSA 矩阵的每一行,位于同一列位置处,将会出现一个最大值点,理论上u0满足w0-2πu0/M=0。如果忽略指数项,则可以看出对于每个子孔径,其峰值都出现在u0=w0M/2π 。此式是在忽略误差项后得到的结果,因此,由上式只能得到w0的大致估计值w′0=2πu0/M,利用这个估计值可以产生一个补偿值:

把这个补偿值与式(7)相乘即可完成补偿操作。实际处理中,OSA 矩阵每一列(对应不同的u)都要产生一个w′0,然后对每一列中的数据(对应不同的l)产生不同的g(l),利用g(l)对每个点进行补偿,从而完成OSA 矩阵的聚焦处理。此时OSA 矩阵的表达式为:

为了在l向上分辨率接近理想的分辨率,必须满足a(w20-w′20)l2d2≤2π 。在l方向对式(9)第二个指数项进行FFT 变换,得到OSA 矩阵最终表达式为:
参见得到w′0的过程,通过上式最大值所在点,可以得到w0的新的估计值:

按照上述方法对式(4)进行处理,并且设a=0.000 2,N=255,L=32,M=16,d=8,图4 即f(n)所对应的OSA 矩阵幅度图。与没有经过OSA 处理的幅度图作比较,单频包络宽度明显减小,从而可以增加复频率分辨率。
上面所有的过程均为线性的,因此对于预处理后得到的多频率线性叠加复信号,也可以按照同样的步骤对高阶误差向进行补偿,在聚束式SAR 成像算法中,主要考虑二次项误差。综上所述,重叠子孔径算法的流程图,如图5[5]。
3 CS 基本原理及RCMC
Chirp Scaling 原理[6],即线性调频信号与一个具有适当相关调频率的调频信号(称为CS 因子)相乘,结果仍然是一个调频信号,只是相位中心和调频率发生变化。这样采用新的调频率进行距离压缩后,信号的位置产生位移,使得不同距离上的目标的频域距离徙动曲线一致化,因此可以准确校正距离徙动,最终实现精确成像。同时通过对Chirp 信号进行频率调制,实现了对该信号的尺度变换(变标)或平移。基于这种原理,可以通过相位相乘替代时域插值来完成随距离变化的RCMC。此外,由于需要在二维频域进行数据处理,CS 还能解决二次距离压缩(SRC)对方位频率的依赖问题。


可得到信号:

其瞬时频率为:

因此,新的线性调频信号s'(τ)的调频率将为k+kref,经匹配滤波后峰值点出现在(令fτ'=0)时刻:
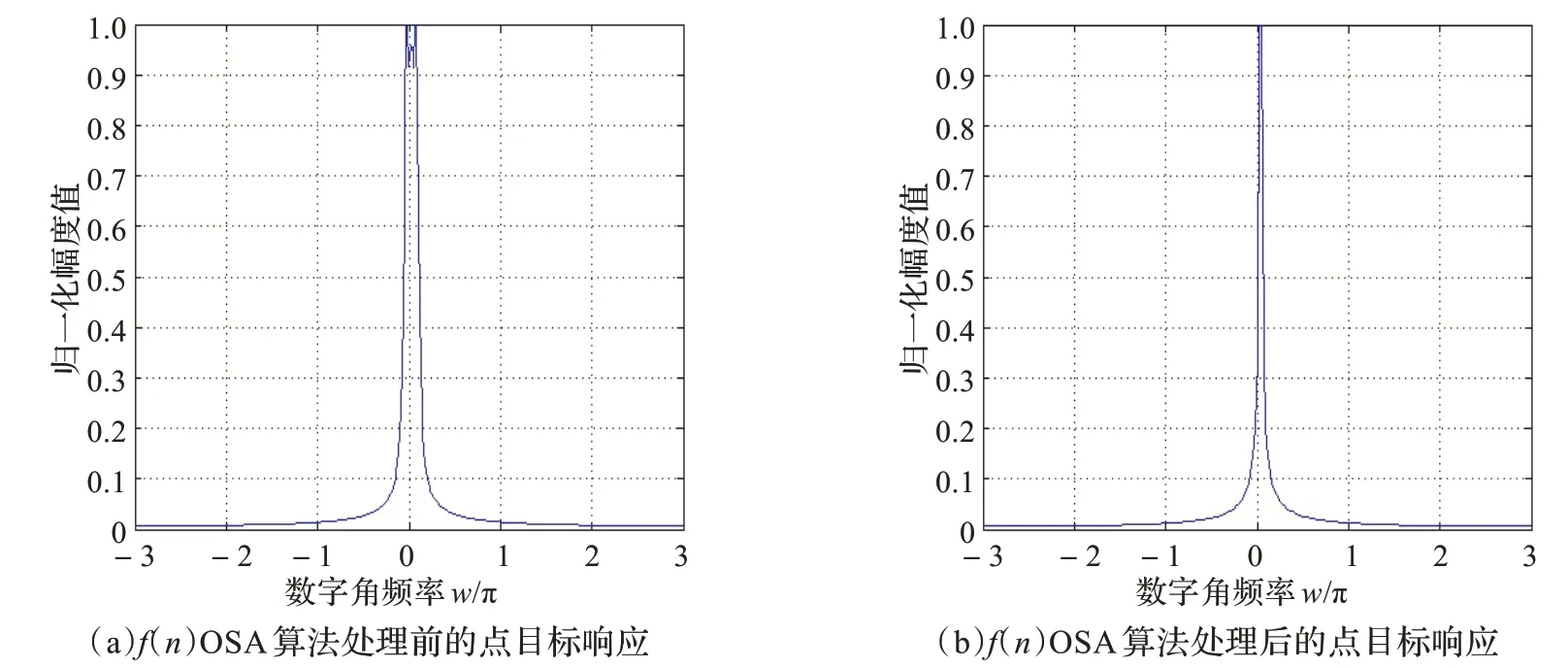
图4 f(n)傅里叶变换

图5 OSA 流程图

实现了对信号的尺度变换或者平移。
算法中,通过Chirp Scaling 操作实现RCMC,即通过FFT、线性相位相乘,以及IFFT 等操作对目标的徙动轨迹进行上述的变标或平移,以实现距离徙动校正。与一般插值方法相比,Chirp Scaling 操作可以更高效、更精确地实现距离向插值,因此非常适于RCMC。但是,在使用Chirp Scaling 之前必须满足两个条件:首先,距离向数据必须具有Chirp 编码特性;其次,Chirp Scaling 平移必须足够小,以避免出现超出距离采样率的混叠扩展频谱。为了满足第二个条件,可以将RCMC 分为两步:首先对参考轨迹(测绘区域中心)进行RCM 校正,然后在Chirp Scaling 操作时,仅校正每条轨迹与参考轨迹之间的差量。这样,Chirp Scaling所需的偏移量将会很小,从而大大降低了带宽增幅。
对于最短距离为R0的目标,距离多普勒域的距离等式近似为:

这种近似适用于低斜视角和窄孔径情况。距离徙动由上式的第二项给出,它是最短斜距R0的线性函数,也是方位频率fη的二次函数。其中λ 为雷达波束长度,Vr为雷达平台径向速度。距离多普勒域中的每一水平线具有同样的fη,因而通常在该方向上逐行进行RCMC[1,6-7]。
可以将上式的RCM 看成是整体RCM。使用Chirp Scaling 校正整体RCM,可能会造成信号移出距离基带上的匹配滤波器频带。解决方案是将RCM 分为两部分:表示参考或中心目标RCM 的“一致RCM”以及“补余RCM”。对所有目标来说,一致RCM 都是相同的,补余RCM 表示RCM 的残余部分。补余RCM 是与距离相关的,与一致RCM 相比小得多。这样每一RCM 分量可以通过不同操作分别校正。
图6 为一致/补余RCM 的示意图。图6(a)给出了不同距离上的三个目标的能量轨迹(为简便计,数据已经过距离压缩)。垂直坐标为多普勒频率,每个目标具有相同的多普勒带宽(为简便计,多普勒中心频率假设为零)。由于上式中的二阶系数随距离增大,因而每个目标的曲率各不相同。如果参考目标选在中心,则将该点处的RCM定义为一致RCM。一致RCM 不随距离改变,也就是说,其对所有目标来说是相同的,如图6(b)所示。从每个目标中去除一致RCM 后,就得到了补余RCM,如图6(c)所示。为了表示的需要,图6 中所示的补余RCM 被夸大了,实际上它与一致RCM 相比非常小。
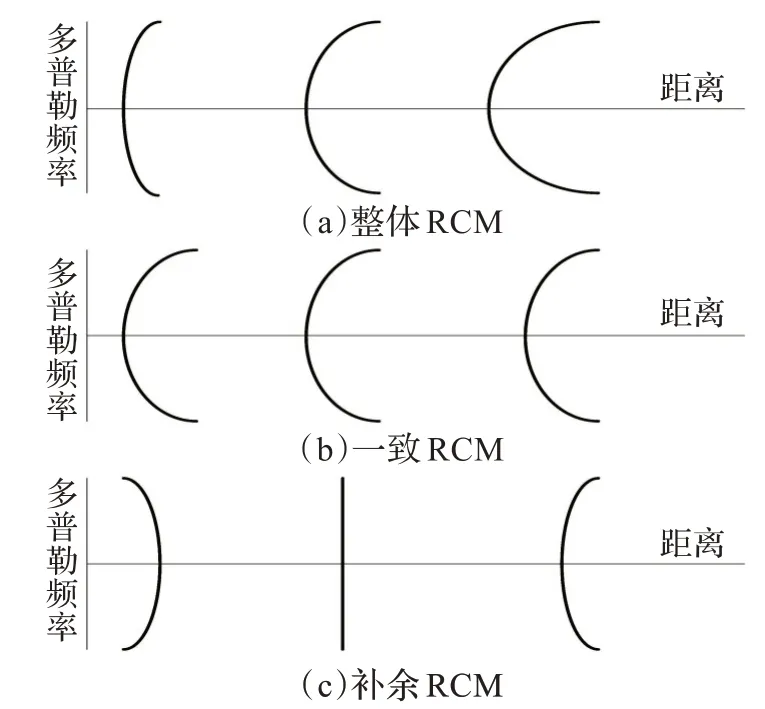
图6 整体RCM 为一致RCM 与补余RCM 之和
在进行RCMC 时,可以相对任何初始位置进行平移,为此可将参考位置选在RCMC 为零的距离和方位点上。由于主要目的之一是减少Chirp Scaling 操作引入的频谱偏移,所以参考点在选择上应尽量减小补余RCMC。
4 算法流程设计与仿真实验
4.1 算法流程设计
Chirp Scaling 操作可以高效、精确地实现距离向处理,因此非常适于RCMC。重叠子孔径算法对复信号进行分段处理,在对信号进行FFT 变换过程中,完成信号中误差项的补偿工作。考虑两种算法各自的局限性与特点,本文设计了一种综合性方案,即在对成像效果影响较小的距离向使用CS 操作,而在方位向使用OSA 原理进行误差补偿。下来对经典CS 算法和设计的综合性方案进行简单阐述和成像性能对比,图7 为经典CS 算法的处理流程图。
标准Chirp Scaling 成像算法主要包括四次傅里叶变换和三次相位相乘。CS 操作贯穿于算法处理的各个环节,包括距离向的距离徙动校正、距离匹配滤波与方位向的匹配滤波等。
综合性设计方案中,距离向使用CS 操作校正RCM,而在方位向使用OSA 原理进行方位向误差的处理。该方案流程设计图如图8。
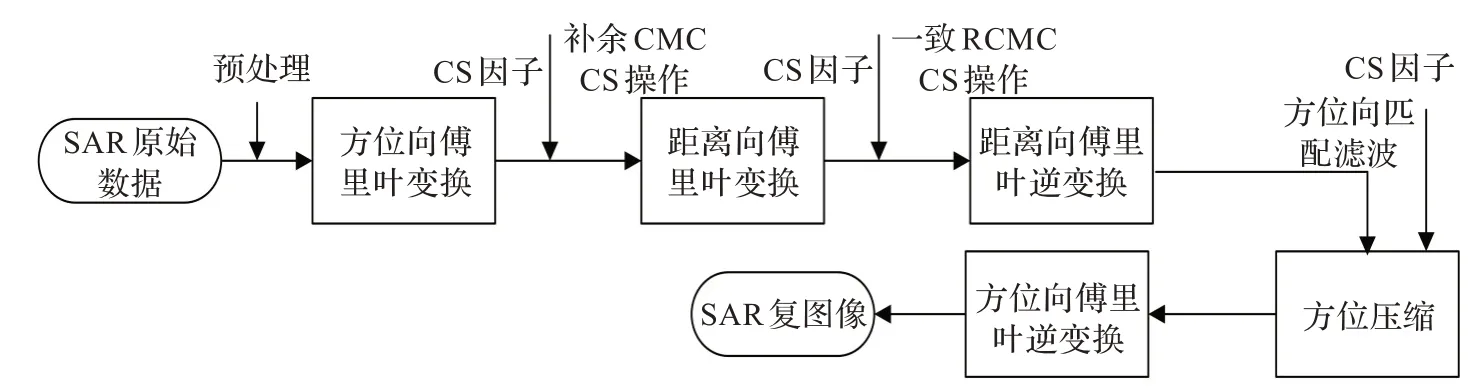
图7 经典CS 算法处理流程图
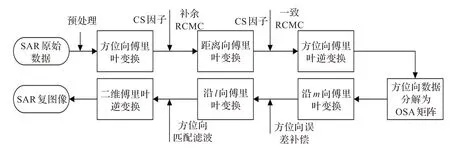
图8 算法流程设计图
算法流程说明如下:
(1)通过方位向FFT 将SAR 回波信号变换到方位频域,即距离多普勒域。
(2)通过相位相乘实现Chirp Scaling 操作,使所有目标的距离徙动轨迹一致化。
(3)通过距离向FFT 将数据变换到二维频域。
(4)通过与参考函数进行相位相乘,完成距离压缩、SRC 和一致RCMC。通过方位向IFFT 将二维频域中的数据变回到方位时域。
(5)通过在方位向构建OSA 矩阵,利用OSA 原理补偿方位向误差,同时完成方位向的傅里叶变换。
(6)通过与参考函数进行方位向匹配滤波,完成方位压缩。
(7)最后通过二维IFFT 将数据变回到二维时域,即SAR 复图像域。
需要注意的是,由于需要在数据中保留距离向Chirp信息,以实现步骤2 中的Scaling 操作,所以CSA 不能首先进行距离压缩。如果数据已经经过距离压缩(在某些情况下),则需要通过距离延拓重建数据的距离向Chirp信息。
把雷达原始数据变换到频域的目的是因为CS 操作在频域中比较容易实现。在距离向处理过程中,首先对参考轨迹(测绘区域中心)进行RCM 校正,然后在Chirp Scaling操作时,仅校正每条轨迹与参考轨迹之间的差量。这样,Chirp Scaling 所需的偏移量将会很小,从而大大降低了带宽增幅。
在方位向处理过程中,首先,将经过距离向处理的雷达数据在方位向构造成OSA 矩阵,然后依据索引m进行傅里叶变换,得到方位瞬时距离的粗略估计值,其次根据高阶误差函数得到它们的粗略估计值,并用这个估计值进行误差补偿,部分消除高阶误差函数的影响,然后根据索引l进行傅里叶变换,得到相对精确的方位距离;而后进行方位向匹配滤波进行方位压缩,最后利用二维傅里叶变换得到雷达图像。
4.2 仿真实验
基于表1 提供的系统仿真参数,在MATLAB 仿真平台中进行仿真验证,将方案中设计的成像算法的仿真结果和CS 算法的仿真结果做比对参考设置,如表1。
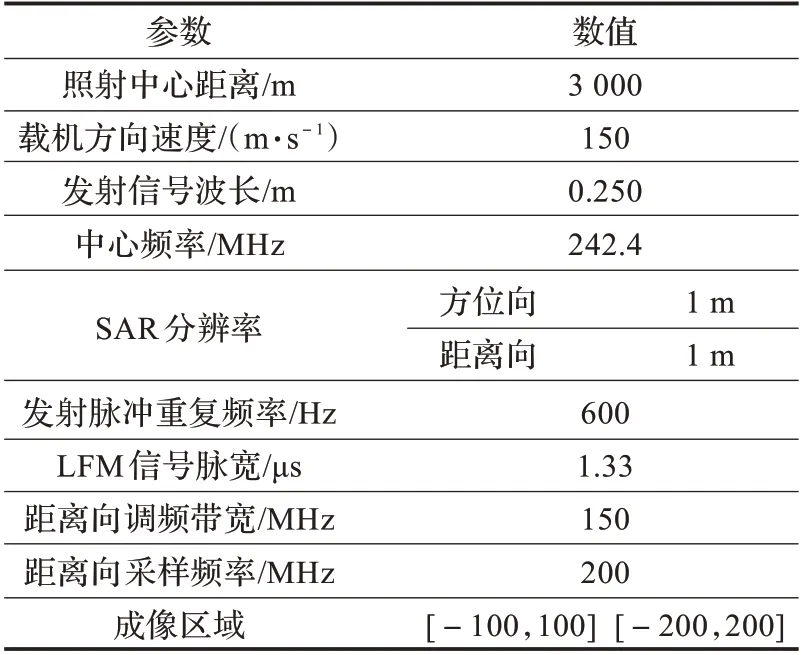
表1 仿真参数设置
根据表1 的系统仿真参数,方位向采样数为400,采取如下参数划分子孔径:M=128,Δ=64,L=14。仿真时在成像区域设置10 个点目标:构建一个简单的飞机模型。图9为MATLAB 仿真平台下的两种成像算法成像效果图。
由成像效果图可以看出,CS 算法作为一种经典的成像算法,在距离向和方位向利用Chirp Scaling 处理完成了对插值的近似,是一种高效率的成像算法。CS 算法与方案算法都能够在正侧视条件下较好地完成成像,而基于OSA 与CS 原理的成像算法聚焦度更高。图中前两幅仿真所示为正侧视条件下的成像效果图,但是通常在对目标的成像事实会存在一定得斜视角的,随着斜视角的增大,经典CS 算法由于未考虑SRC 的空变特性,忽略了与距离向的依赖关系,因此会引起较大误差[7-8]。这个时候应用OSA 原理的算法的优势就突显出来了,重叠子孔径算法原理在方位向对高阶误差的补偿弥补了这种误差,提高了斜视条件下的SAR 成像效果,图中后两幅仿真所示为照射波束偏转8°条件下的成像效果图。随着采样点数的增加,成像效果会更好。图10 给出了两种算法点目标成像的方位向剖面图。
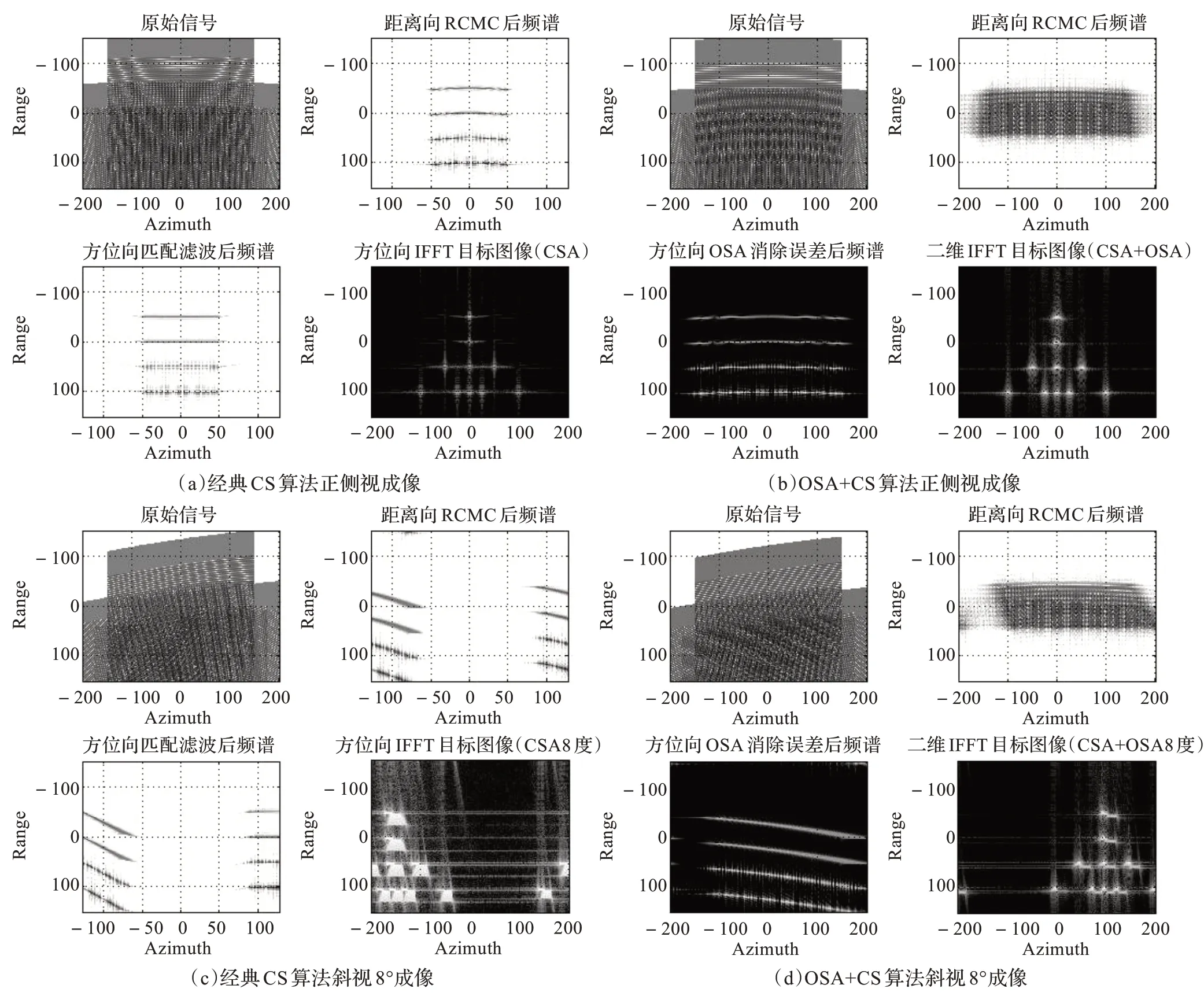
图9 算法成像效果图
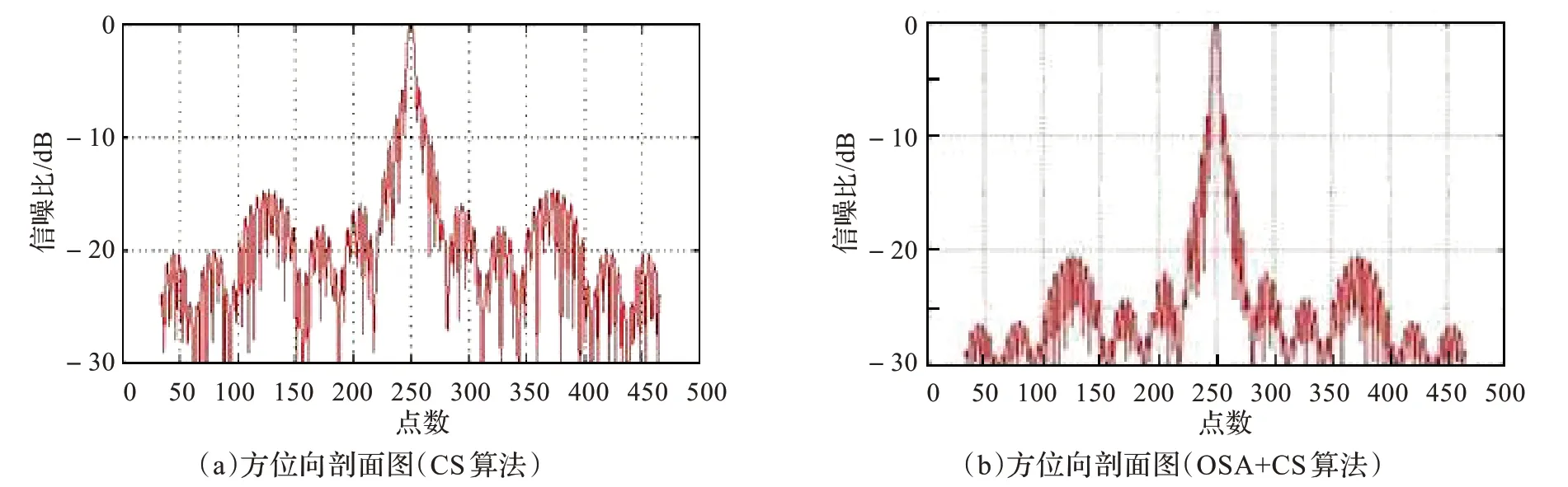
图10 方位向剖面图
由图10 可以看出,OSA 算法的应用确实提高了信号的频率分辨率,主旁瓣信号比明显提高,复信号包络宽度也相应地减小了。基于OSA 和CS 原理的成像算法补偿了二次相位误差,但是未能补偿更高次距离偏移引起的相位误差。当斜视角增大且分辨率要求较高时,方位向聚焦效果不理想,主要表现为旁瓣太高。在仿真中使用常规的CS算法和基于OSA+CS 算法都很难达到非常理想的效果。基于OSA 和CS 原理的成像算法在雷达信号方位向数据处理时,对每一点都构造适当的补偿函数去补偿误差,完成OSA 矩阵聚焦处理,突出了SAR 信号处理方位向数据的重要性,使得成像结果比常规的CS 算法稍有优势。同时也要看到基于OSA 和CS 原理的成像算法由于方位向数据的处理提高了成像精度,但是相对于常规的CS 算法,其运算量也明显增大。在相同环境测试下,常规CS 算法的运算时间为4.05 s,而基于OSA 和CS 原理的成像算法为6.28 s。若将三次或者更高次的相位误差引入处理,则运算量会更高,影响算法的实用性。
5 结束语
SAR 成像过程中常常会出现系统误差项,本文详细介绍了一种OSA 误差补偿算法,并给出了算法具体的实现流程和仿真图形;将OSA 原理与CS 原理相结合,提出了一种设计方案,并对其性能和计算量进行了分析,既提高了成像的效果,又考虑到了方案的运算量问题。
实验结果表明,重叠子孔径算法能在很大程度上提高复信号的频率分辨率,而且该成像处理方法不过分依赖雷达系统对信号处理和运动补偿的作用,单个子孔径成像算法简单可靠,为在一定条件下实现机载SAR 系统的大斜视、高分辨成像提供了一种可行的方法,具有一定应用价值。
[1] 张格子.机载聚束式合成孔径雷达成像算法研究[D].上海:上海交通大学,2007:42-47.
[2] 谢冬冬,禹卫东,徐峰.利用OSA 算法处理条带SAR 数据[J].系统工程与电子技术,2005(6).
[3] 谢冬冬,禹卫东.OSA 在基于去斜率技术的SAR 成像算法中的应用[J].现代雷达,2004(9).
[4] 谢冬冬.OSA 在高分辨率SAR 成像算法中的应用[D].北京:中国科学院电子学研究所,2005.
[5] 李勇,朱岱寅,朱兆达.机载合成孔径雷达大斜视高分辨率重叠子孔径成像算法研究[J].电子与信息学报,2006,28(9):1577-1581.
[6] 李勇,朱岱寅,朱兆达.机载合成孔径雷达高分辨率孔径成像算法研究[J].电子与信息学报,2004,26:91-96.
[7] 丁岚,一种改进的Chirp Scaling 成像算法[J].电脑知识与技术,2009(4):2760-2763.
[8] 保铮.雷达成像技术[M].北京:电子工业出版社,2005.
