装卸机器人用永磁同步电机弱磁调速系统
2013-02-22程舒乔姜淑忠
程舒乔,姜淑忠
(上海交通大学,上海200030)
0 引 言
工业机器人是当前的研究热点,其应用日趋广泛。装卸机器人广泛应用于无线电、微电子及机械制造业,其特点是装卸移动距离长,为缩短运动时间,移动时有较高的速度。相比其他类型的工业机器人,装卸机器人在满足高控制精度和高可性的同时,还需要保证较高的速度。
永磁同步电动机(以下简称PMSM)具有体积小、可靠性高、功率因数高和效率高等诸多优点,在工业机器人方面获得了广泛研究和应用。但其转子励磁磁动势固定,运行时端电压和速度关系成正比,因而无法运行于较高的速度,在装卸机器人应用方面受到限制。采用弱磁控制可以获得宽广的调速范围,从而解决此问题。
本文针对装卸机器人要求高速度的特点,设计了一种装卸机器人用PMSM弱磁调速系统。电流调节器的输出电压受到逆变器直流侧电压的限制,电压外环调节器,通过对逆变器输出电压的控制,即控制电流调节器输出电压,直接调节电流的去磁作用,实现PMSM的弱磁控制。实验结果表明,该系统可以很好地满足装卸机器人高速运行的要求,具有很好的推广价值。
1 PMSM数学模型
为分析永磁同步电动机的稳态运行性能和瞬态性能,首先建立PMSM的数学模型。忽略定子电阻,基于旋转坐标系d-q轴的PMSM定子磁链方程:

式中:id、iq为定子电流矢量的 d、q轴电流;ud、uq为定子d、q轴电压;Ld、Lq为定子绕组的d、q轴电感;ω为转子角速度;p为电机极对数;ψf为永磁体转子产生的磁链。
本文采用转子磁路为表面凸出式的PMSM。其制造成本较低,适用于工业的广泛应用;通过弱磁调速,能使速度达到装卸用机器人的高速要求;永磁磁极易于实现最优设计,显著提高电动机的性能;交、直感基本相等,即Ld=Lq,因此式(5)可以简化:

由式(6)可知,对于已经出厂的电机,电机极对数和永磁体的励磁磁链都是固定的,控制交轴电流iq就能很好地控制电磁转矩,从而实现对直流电动机的严格模拟。
2 弱磁控制理论
2.1 弱磁区域的限制

2.2 弱磁控制策略
转速较低时,电机运行在恒转矩区域,采用最大转矩/电流比(MTPA)的控制方式,此时电机能输出最大电磁转矩。随着转速升高,定子电压受逆变器所能承受的极限电压限制,电机运行在恒功率区域,采用弱磁控制方式,有效扩大电机速度范围。
(1)恒转矩运行分析。运行于转折速度ωd以下,采用最大转矩/电流比(MTPA)的控制方式。对于表面式永磁同步电动机,由式(6)可知,即采用id=0的矢量控制方式。如图1所示,电机沿着MTPA的OA曲线、O→A方向运行。在该控制方式下,电机的铜耗最小,同时实现低速时的最大转矩输出。此时装卸机器人适用于装卸重量大、对速度要求不高的场合。其中,转折速度表达式:


图1 表面式永磁同步电动机运行过程定子电流矢量轨迹
(2)恒功率运行分析。电机转速增至转折速度ωd,电机工作于A点,此时电压和电流均达到电动机的极限值,根据式(3)和式(4),可以得到电压方程式:

由式(10)可知,永磁同步电动机的励磁磁动势由永磁体产生而无法调节,如果继续增加转速,只有增加电动机直轴去磁电流分量或减小交轴电流分量。由于电动机相电流的限制,增加直轴去磁电流分量而保证电枢电流不超过电流极限值,交轴电流分量就相应减少。此电流控制方式即为弱磁控制策略。
随着直轴电流id负向增大,转速相应升高,此时根据电动机的电流极限方程(式(8))可知,此时电动机沿AB曲线,A→B方向运行,采用负id补偿法的弱磁控制,随着转速升高,保持最大可能的转矩输出。此时装卸机器人适用于装卸重量小、对速度要求高的场合。
3 基于电压外环调节器的弱磁控制方案
图2是本文提出的基于电压外环控制的弱磁控制系统的方框图。在功能上,能够实现装卸机器人全速范围的要求,可以将系统电流轨迹的控制环节分为三部分。
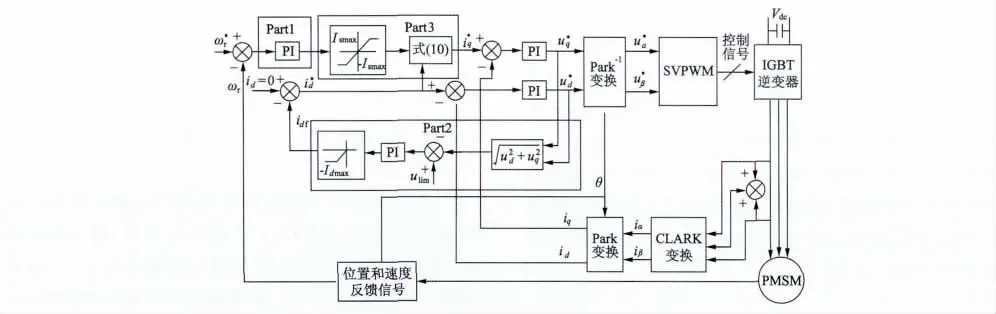
图2 表面式永磁同步电动机弱磁控制系统
Part1是转矩控制部分。速度PI控制器的输出是定子电流空间矢量指令。电机运行于低速区域时,电流调节器的输出电压<ulim,此时Part2不起作用;此时表面式永磁同步电动机采用id=0的矢量控制方式,交轴电流等于定子电流空间矢量指令,此时Part3不工作。
弱磁控制环节由Part2和Part3共同组成。在加速过程中,随着PMSM的速度逐渐升高,电流控制器,尤其是交轴电流控制器的输出逐渐增加并接近脉宽调制器的极限,随着电压余量逐渐降低,如果没有合适的控制方法,电流调节器的性能降低,趋向饱和,并最终失去其可控性。
如图2所示,Part2将电流PI调节器的输出作为电压外环控制的输入量,用来确定弱磁控制的起点,实现工作模式的切换。通过控制电压反馈的输入量,从而保证电压余量。同时为防止电流调节器饱和,Part2中的PI调节器产生直轴电流增量idf,d轴电流沿负向增加,控制直轴电流增量idf可以调节直轴去磁分量id,实际上直接控制电流的去磁作用,从而调节磁通水平,实现表面式永磁同步电动机的弱磁控制。idf的极限值由式(11)决定:

上式中,idrate由图1中最大转矩/电流比轨迹、电压极限圆和电流极限圆三者的交点(即A点处)的直轴去磁电流确定。
这套弱磁方案并不依赖于永磁同步电动机的本体模型,而是由基于永磁同步电动机的电流PI调节器输出电压值的电压外环控制实现,参数鲁棒性好,算法简单可靠,能广泛应用于工程中。
4 实验结果及结论
根据控制系统图2,采用MATLAB/Simulink实现装卸机器人用永磁同步电动机的弱磁控制仿真。0~4 s时,机器人低速运行,电动机采用最大转矩/电流控制运行的最高转速,直轴电流id=0,输出电磁扭矩最大。4~12 s时,机器人速度逐渐升高,电机进入弱磁状态,沿着恒功率曲线运行,直轴电流负向增大,交轴电流减小,转矩输出能力下降。12 s以后,转速达到设定值,系统趋向稳定。

根据以上实验结果可知,弱磁控制系统极大地扩展了电机的调速范围,能达到装卸机器人的速度要求,同时转矩大小范围能很好地满足机器人不同情况下的要求。电机能够根据电流设定值的变化在包括弱磁调速的整个速度范围内平稳运行。仿真结果与理论分析一致,同时验证了弱磁控制和仿真程序的正确性。
[1] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[2] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[3] 郭庆鼎,孙宜标,王丽梅.现代永磁电动机交流伺服系统[M].北京:中国电力出版社,2006.
[4] 章玮,肖建民,王伟颖.单相-三相矩阵变换器驱动PMSM的弱磁控制[J].电机与控制学报,2011,15(1):1-5.
[5] 冯江华,桂卫华,许峻峰.考虑参数变化的永磁同步电动机弱磁控制研究[J].微电机,2008,41(4):28-31.
[6] 唐朝晖,丁强,喻寿益,桂卫华.表面贴装式永磁同步电机的弱磁策略的研究[J].控制工程,2011,18(3):384-387.
[7] Morimoto S,Sanada M,Takeda Y.Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator[J].IEEE Transactions on Industrial Electronics,1994,30(4):920-926.
[8] Tursini M,Chiricozzi E,Petrella R.Feedforward flux-weakening control of surface-mounted permanent-magnet synchronous motors accounting for resistive voltage drop[J].IEEE Transactions on Industrial Electronics,2010,57(1):440-448.