结合中心投影和NSCT的图像不变特征提取
2013-01-31李康顺
吴 军,孙 涛,李康顺,2
(1.江西理工大学 信息工程学院,江西 赣州341000;2.华南农业大学 信息学院,广东 广州510642)
图像不变特征提取是图像处理、模式识别、计算机视觉等领域的热点研究问题,有着广阔的应用领域[1-2]。根据提取特征时图像信息利用程度不同,不变特征提取的算法主要包括基于轮廓的算法和基于区域的算法[3]。基于轮廓的算法最常用的方法有Fourier描述子和小波描述子[4]。基于轮廓的算法具有易于理解、计算量较小等优点,但其特征提取结果依赖于轮廓提取的结果,而且只适用于单一轮廓的物体,极大地限制了其应用范围。基于区域的算法则是利用图像上所有的点进行不变特征提取,常用的图像全局特征提取方法有Hu矩、连续正交矩[5]、小波矩[6]等。基于区域的算法具有较完善的理论基础,在很多领域得到了广泛应用。但基于区域的方法存在计算复杂度较高和对图像背景上的噪点敏感等不足。
针对目前不变特征提取方法普遍存在方法技巧性强、缺乏理论基础等不足,本文提出了一种结合中心投影和非下采样Contourlet变换(Non-subsampled Contourlet Transform,NSCT)的全局图像不变特征提取算法。算法首先利用中心投影获得图像的广义轮廓表示,其次在相位域中对广义轮廓进行离散傅里叶变换,最后对离散傅里叶系数进行NSCT变换并构造不变特征。实验结果表明本文算法构造的不变特征对相同目标图像仿射变换具有较强的稳健性,对不同目标图像具有较好的敏感性,是一种有效的仿射不变特征提取算法。
1 中心投影变换
文献[7]提出中心投影变换,成功地用于字符、二值图像等的旋转不变特征提取。利用中心投影变换,不仅能够实现数据降维,而且能将多部分组成的物体转化为一个闭合轮廓。
假设区域D上存在二值图像I(x,y),D0⊂D为待识别对象,则

将式(1)从笛卡尔坐标系转换为极坐标系,以目标区域的质心m为原点,目标区域中像素与质心的最大距离为半径R,则G(r,θ)为原始图像I(x,y)在极坐标下的表示,从而可给出中心投影变换的定义。
推论:当G(r,θ)为二值图像的极坐标表示,那么{f(θ)|θ∈[0,2π]}为原始图像I(x,y)的广义轮廓。
由推论可知:f(θ)为角度θ上图像各像素灰度值的累加和,(f(θ),θ)为极坐标系下的一条闭合曲线;同时推论给出了原始图像在笛卡尔坐标系下与极坐标系下图像灰度值和坐标之间的对应关系。
2 非采样Contourlet变换
2002年Do M N[8]提出了一种真正的非自适应图像多尺度几何表示方法——Contourlet变换,即塔形方向滤波器组(PDFB)。Contourlet变换是一种多分辨率、局域、多方向的图像表示方法。与其他变换相比,Contourlet变换能够仅使用少量系数有效地表示图像平滑轮廓,而平滑轮廓正是自然图像中的重要特征之一。但由于Contourlet变换在LP滤波和DFB滤波中均存在上采样和下采样,因此Contourlet变换不具有平移不变性。2005年Arthur Cunha[9]等人提出了一种改进的Contourlet变换——非下采样Contourlet变换。
非下采样Contourlet变换[10]结构和Contourlet变换的结构在本质上具有相似的子带分解,但是不具有上采样和下采样过程。非下采样塔形滤波器和非下采样方向性滤波器都是双通道滤波器,它们的频率响应如图1所示。非下采样Contourlet变换可以分成具有平移不变性的两个部分:非下采样塔形滤波器和非下采样方向性滤波器。非下采样塔形滤波器(NSP)确保多尺度性,非下采样方向性滤波器(NSDFB)确保多方向性。由于没有上采样和下采样,所有的子带分解都与原图大小相同。非下采样Contourlet变换是一种完善的变换,具有平移不变性、多尺度性、多方向性,并能快速实现,其构造原理图和频域示意图分别如图2、图3所示。
3 特征提取算法
3.1 广义轮廓参数化
通过中心投影变换可将图像转换为广义轮廓,同时为了能够使用基于轮廓的分析方法,需要将广义轮廓参数化,从而提取图像的不变特征。本文采用EAN(Equal Area Normalization)[11]的参数化方法,主要包括以下步骤:
1)离散的广义轮廓{(x(θk),y(θk)):k=0,1,2,…,N-1},计算广义轮廓所围的总面积为


图2 NSCT结构图
图3 NSCT频域示意图
2)选择广义轮廓的起始点作为参数化曲线的起始点P0(x'(θ0),y'(θ0))。从P0开始,寻找点P1(x'(θ1),y'(θ1)),使曲线P0GP1围成的面积等于Spart,G为物体质心。
3)类似地,从P1(x'(θ1),y'(θ1))开始沿着广义轮廓计算所有点Pi(x'(θi),y'(θi)),i∈{2,3,…,N-1}。图4为广义轮廓EAN参数化的示例。

图4 EAN参数化示例
3.2 特征提取
本文利用图像广义轮廓的概念构造了NSCT域图像目标的不变特征。该特征不仅具有中心投影变换所具有的旋转不变特性,同时还具有NSCT变换所具备的平移不变、多尺度、多方向特性,二者的结合提高了对相近目标的区分能力。
本文设计的仿射不变特征提取算法主要包含以下步骤:1)将图像I(x,y)从笛卡尔坐标系转换到极坐标系I(r,θ),极坐标系以质心)为圆心,径向r分量的取值范围为提取图像I(r,θ)的广义轮廓∂I,利用原始图像在笛卡尔坐标系下与极坐标系下图像灰度值和坐标之间的对应关系,对广义轮廓∂I闭合曲线区域内元素赋值,得到IS(r,θ);3)相位域中对IS(r,θ)进行一维离散傅里叶变换,得到ISR(r,θ);4)对ISR(r,θ)进行NSCT变换,得到NSCT域仿射不变特征向量。
假设原始图像I(x,y)大小为N×N,根据特征提取算法步骤可分析其计算复杂度如下:坐标系转换复杂度为O(N2),广义轮廓复杂度为O(N),一维离散傅里叶复杂度为O(N2logN),NSCT复杂度为O(N2)。因此整个算法的计算复杂度为O(N2logN)。
4 实验结果
4.1 稳健性分析
为了验证本文算法的有效性,选用图5所示的飞机图像作为原始测试图像,对图4中的图像分别进行平移(平移量为0,±5,±10)、比例缩放(比例因子为0.75,0.85,0.95,1.05,1.15,1.25)、旋转(旋转角为0°,30°,60°,90°,120°,150°)变换,得到测试图像集。选用分离度D(i,K)=1-作为衡量指标,部分结果分别如表1和表2所示。

图5 原始测试图像

表1 不同位置和方向图像与原图像间分离度
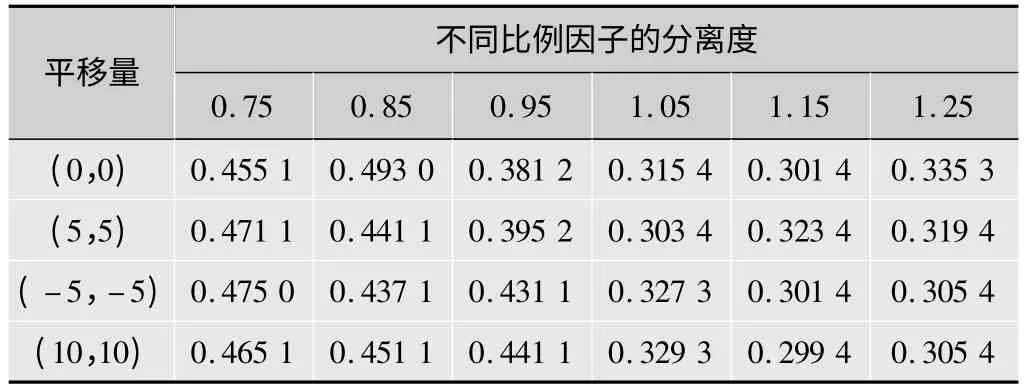
表2 不同位置和尺寸图像与原图像间分离度
表1和表2的实验结果分别显示了原始图像仿射变换前后间的分离度值。从表1可以看出本文算法提取的不变特征对平移变换具有很好的稳健性,对两种组合变换引入的最大误差为0.067 9。从表2的实验结果可以看出本文算法在比例缩放攻击下引入的最大误差为0.059 9,最小为0.002。因此本文算法抗比例缩放变换性能略优于文献[12]。
4.2 敏感性分析
图像仿射不变特征除了3对图像的各种几何变形具有较好的鲁棒性外,还必须能够区分内容很接近的目标图像,即提取的特征既具稳健性又具敏感性。通过对NSCT变换系数的分析,考虑到子带系数的统计特性,选用类间区分度d(Ii,Ij)衡量特征的敏感性,定义为

式中:Ci和Cj分别表示第i类目标图像和第j类目标图像的仿射不变特征;WKLD(Ii,Ij)是目标图像间自带系数分布的Kullback-Leibler[13]距离;|Ci-Cj|是特征值的欧氏距离。类间分离度d(Ii,Ij)取值越大,则表示目标图像间区分越大。
表3所示为目标图像与对比图像在某些仿射变换下的区分度值,从表3可见不同目标图像间的区分度最大值为0.967 1,最小值为0.801 4,远大于相同目标图像间的分离度值。因此本文设计算法具有较好的类间区分度。

表3 测试图像的类间区分度
4.3 与类似算法的比较
文献[14]提出了一种基于轮廓追踪的稳健特征识别和提取方法,本文算法采用与文献[14]相同的实验数据进行特征提取,实验结果如表4所示。从表4可见,本文算法在字符A、H、己、已之间的区分度从文献[14]的0.185 2和0.178 0分别提高到本文算法下的0.815 5和0.921 2。因此在相同实验数据下,本文算法的区分度优于对比文献[14]。

表4 字符A、H、己、已的区分度
5 结论
本文设计了一种新的全局不变特征提取算法,该特征结合中心投影和NSCT变换,充分利用了两种技术的优势,使得提取的图像特征具有良好的仿射不变性。实验结果证明本文算法设计的特征对相同目标图像具有较高的稳健性,对不同目标图像具有很好的敏感性,是一种有效的仿射不变特征提取算法。接下来的工作将集中在结合局部仿射不变特征和全局仿射不变特征二者的优势,在有效控制算法复杂度的前提下,设计出性能更加优异的仿射不变特征提取算法。
[1]索增强,卓东风.基于非下采样Contourlet变换多描述图像编码方法[J].电视技术,2012,36(17):23-25.
[2]王昕,李影昉,王影.基于分块和Contourlet变换相结合的多聚焦图像融合算法[J].电视技术,2011,35(23):22-24.
[3]ZHANG D S,LU G J.Review of shape representation and description techniques[J].Pattern Recognition,2004(37):1-19.
[4]MA F,CHANG C Q,HUNG Y S.A subsapce approach for matching 2D shapes under affine distortions[J].Pattern Recognition,2011(44):210-221.
[5]ZHANG H,SHU H Z,HAIGRON P,et al.Construction of a complete set of orthogonal fourier-mellin moment invariants for pattern recognition applications[J].Image and Vision Computing,2010(28):38-44.
[6]ZHANG F,LIU S Q,WANG D B,et al.Aircraft recognition in infrared image using wavelet moment invariants[J].Image and Vision Computing,2009(27):313-318.
[7]TANG Y Y,TAO T,LAM E C M.New method for extraction based on fractal behavior[J].Pattern Recognition,2002(35):1071-1081.
[8]DO M N,VETTERLI M.The contourlet transform:an efficient directional multiresolution image representation[J].IEEE Trans.Image Processing,2005,14(12):2091-2106.
[9]CUNHA A L,ZHOU Jianpin,DO M N.The nonsubsampled contourlet transform:theory,design,and applications[J].IEEE Trans.Image Processing,2006,15(10):3089-3101.
[10]CANDES E J,DONOHO D L.Curvelets:a surprisingly effective non-adaptive representation for objects with edges[EB/OL].[2012-09-02].http://www-stat.stanford.edu/~candes/papers/Curvelet-SMStyle.pdf.
[11]YANG M Q,KPALMA K,RONSIN J.Affine invariance contour descriptou based on the equal area normalization[J].LAENG International Journal of Applied Mathematics,2007(36):2-7.
[12]梅雪,夏良正.Contourlet域目标不变特征提取[J].计算机工程,2010,37(11):275-277.
[13]梅雪,李久贤,夏良正.基于contourlet变换的加权小波特征抽取算法[J].数据采集与处理,2008,23(1):23-27.
[14]杨明,刘强,尹忠科,等.基于轮廓追踪的字符识别特征提取[J].计算机工程与应用,2007,43(20):207-209.
