空间碎片现状与清理
2012-12-29林来兴
林来兴
(北京控制工程研究所,北京 100190)
1 引言
空间碎片是指人类在空间活动过程中遗留在空间的废弃物。2003 年机构间空间碎片委员会(IDAC)提交给联合国外层空间委员会的《空间碎片减缓指南》、2006年2月外空科技小组空间碎片工作组提交的《空间碎片减缓指南修订草案》以及联合国外空委2007年通过的《空间碎片减缓准则》对空间碎片作出了以下基本一致的定义:“空间碎片是指位于地球轨道上或者再入大气层的非功能性的人造物体,包括其碎片和部件。”美国战略司令部下属的空间监视网(SSN)监视到空间碎片数量近十年来、特别是近五年来数量急剧增加,例如直径大于10cm以上的空间碎片,2006年共监测到9 949个,到2010年监测到160 914个,上升了1.6倍之多;至于直径小于10cm 以下的空间碎片,上升速度更快。这说明空间碎片的数量对空间安全的危害已经发展到严峻的程度,特别是在近地轨道,若其数量达到饱和状态,则意味着碎片与卫星相碰概率增大,甚至有可能由于碰撞而发生连锁反应,使得轨道资源成为废墟。为此,当今全世界应同心协力采取有效措施来解决这一问题。
本文将对空间碎片的现状、来源和观测方法进行分析与研究;根据空间碎片特点、大小和所处轨道状态,提出具有针对性的各种清理碎片的要求和清理方法。
2 空间碎片的现状
至今人类的空间活动已有55 年历史,根据统计,在这半个多世纪里,全世界总共有4 765次成功发射,将6 351 个航天器送入轨道(统计截至2010年12月底),进入轨道的质量为6 700多吨。据美国空间监视网络(SSN)观测(截至2011年7月):直径大于10cm(包含地球同步轨道直径大于1m)的空间碎片约1.9万多个;直径在1~10cm 之间的空间碎片有20万个左右;直径在1cm~1mm的空间碎片约有3~4千万个。直径大于10cm的空间碎片其逐年累积数据如图1所示[1](截至2011年3月)。
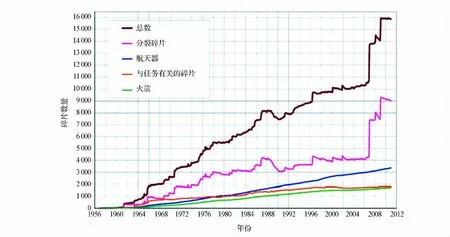
图1 直径大于10cm 的空间碎片逐年累积数据Fig.1 Yearly data of cumulative space debris(>10cm)
直径大于10cm 的1.9万多个空间碎片在轨道分布如下:
1)近地轨道(轨道高度低于2 000km)
空间碎片约15 500个,占总数的80%;工作航天器约600个,非工作航天器(废弃和故障)约2 500个,与任务有关碎片约1 700个,火箭残骸约1 700个,分裂碎片约9 000个。
2)地球中高轨道(轨道高度2 000~10 000km)
空间碎片约2 500个,占总数13%。
3)在地球同步轨道(轨道高度36 000km)
空间碎片约1 250个,占总数7%。
从空间碎片质量的分布来看,直径大于10cm的空间碎片质量约占全部质量的99%以上,约3 000t,人类在半个多世纪内发射入轨航天器有6 000多吨,而目前留在轨道的上的碎片质量将近其一半;这3 000t空间碎片中分布在近地轨道约为2 500t。空间碎片质量在近地轨道的逐年分布如图2所示[2]。2001年和平号空间站解体脱离轨道,坠入大气层烧毁和降落地表面,从图2可以明显看到该年碎片质量明显下降。
在地球同步轨道分布的空间碎片近十几年来一直在增加。虽然有的空间碎片会离开轨道(例如卫星寿命终止或者发生故障),但是每年进入该轨道的空间碎片数量比离开的多大约1倍。
图3表示空间碎片数量在这半个多世纪的增加速度[3]。从图3分析得到:在空间活动开始后的前45年(1957—2003年)空间碎片平均每年增加250个左右(蓝线表示)。从2003年到2010年猛增为每年1 475个左右(红线表示)。其主要原因是空间碰撞产生数量巨大的碎片;次要原因是近几年卫星发射数量和空间碎片累积数量增加,导致一般性碰撞或载荷老化产生碎片的概率也增加;此外还要考虑近十几年来,小卫星、微小卫星、纳星、立方体星等发射数量增加因素的影响。

图2 空间碎片质量在近地轨道逐年分布Fig.2 Mass of space debris in low earth orbit vs.year
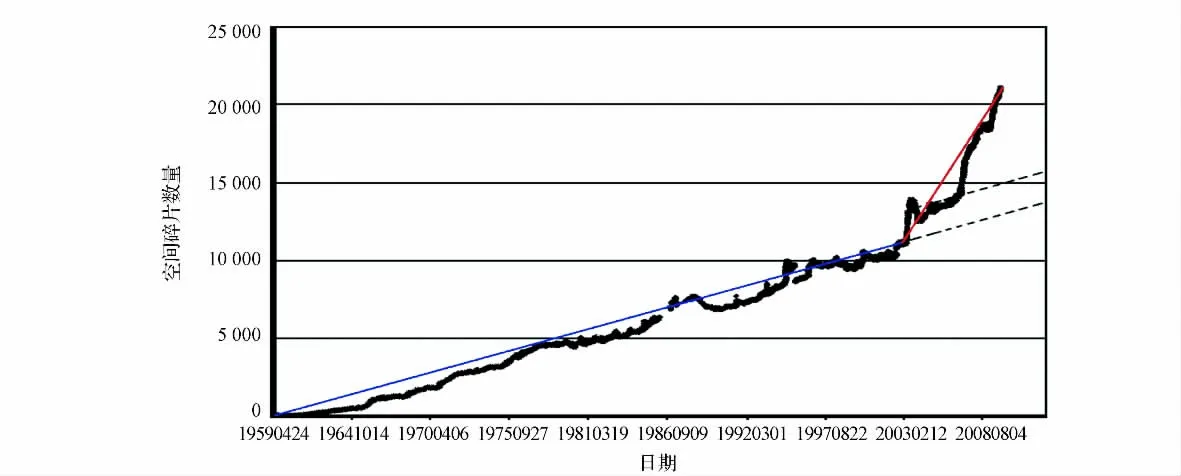
图3 空间碎片增加速率Fig.3 Rate of increase of space debris
空间碎片的在轨寿命与其轨道高度有关。
(1)轨道高度>2 000km,需要几百到上千年才会降落到大气层烧毁;
(2)轨道高度2 000~1 000km,碎片会停留在轨道100年或更长时间;
(3)轨道高度1 000~800km,碎片在轨寿命有数十年;
(4)轨道高度800~600km,碎片在轨寿命为十几年。
由于空间碎片数量随时间推移一直在增加,若不及时采取措施,对人类的空间探索和利用会造成难以接受的不利影响。
3 空间碎片来源与观测
3.1 空间碎片来源
具体分析产生空间碎片的来源,可以概括如下:
(1)在轨道发生碰撞所产生的碎片。这是目前占空间碎片比例最大部分。
例如:在2009年美国铱星33号与俄罗斯失控宇宙2251号卫星相碰,产生碎片2 100个,其中“铱星”碎片900多个,宇宙2251号产生碎片1 200多个。
(2)入轨后火箭剩余燃料、卫星高压气瓶剩余气体、未用完的电池等,都可能因偶然因素爆炸,产生难以估量的碎片。
(3)固体火箭燃料中添加铝粉,燃烧产生的氧化铝向空间喷射,形成空间“沙尘暴”。
(4)飞船和空间站的航天员产生的生活垃圾(如和平号空间站曾经向空间抛出大小垃圾约有200多包)。
(5)受空间碎片的影响,航天器表面材料加速剥落成为新的空间碎片。
(6)航天员在空间行走时遗弃的东西(例如扳手、各种工具、手套、摄像机灯器等物品也成为空间碎片)。
(7)寿命终止后的卫星或者发生故障的卫星均成为大型空间碎片。
(8)携带卫星入轨后的末级火箭,留在空间变成碎片。
(9)核动力卫星及其产生的放射性碎片。
空间碎片来源中有一种使人最担心的,就是俄罗斯和美国先后发射的核动力卫星及其产生的放射性碎片。在2000年统计表明这种碎片大约有3t。这些碎片若落入大气层或最终坠入地球表面,其放射性物质对人类将是一个巨大危害。
(10)还有其他一些碎片来源,目前暂时难以确定。
3.2 空间碎片的观测[4]
全世界对空间碎片监视和观测的系统有许多,下面仅列出典型的几种。
(1)美国空间监视网(SSN)。SSN 从20 世纪60年代初开始组建,是最早且最大的观测系统。可以观测到近地轨道上直径大于10cm 和地球同步轨道上直径大于1m 的空间碎片。
为了达到连续跟踪空间碎片运行轨迹,SSN 在全世界分别组建了25个观测站,可以连续跟踪观测在轨道高度600km 以上的空间碎片。
SSN 观测设备采用陆基跟踪无线电雷达。雷达可观测碎片直径大小与采用的无线电频率有关。频率越高,观测碎片直径越小(分辨率越高)。雷达频率与可观测碎片直径的关系如表1所示。

表1 雷达频率与可观测到碎片的关系Table 1 Radar frequency and the observable debris
SSN 早期采用雷达频段为UHF,只能观测到直径大于10cm 的碎片。美国空军从2009年开始计划研制新的空间碎片观测系统,称为“空间篱笆”(Space Fence)[5],准备用来代替SSN,计划在2015年建成,费用约为35亿美元,采用S频段,预计可提高观测精度半个数量级,即可以观测到直径2cm 以上的碎片。
除此以外,还有两种观测雷达:①“干草堆”(Hay Stack)雷达;②“金石”(Gold Stone)雷达可以观测碎片直径为2cm,但是只能跟踪局部区域。
(2)德国“跟踪和成像雷达系统”(Tracking and Imaging Rader,TIRA),现已开始工作,可观测直径大于2cm 的碎片,为区域性观测。
(3)法国国防部格雷夫斯(GRAVES)双基地雷达。2009年投入工作,可观测直径大于1 m 的碎片,为区域性观测。
4 清理空间碎片的原则和要求
清理空间碎片的原则和要求可分为两个阶段:第一阶段是对现有空间碎片进行清理;第二阶段则对以后要发射入轨的新卫星提出要求。同时在这两阶段期间还需要设置一段过渡时期(例如,设过渡时期为几年时间,最终规定发射要求从××年×月×日开始执行)。
4.1 清理现有空间碎片的原则和要求
1)根据空间碎片现状分别采用不同的原则和要求
(1)尽快清理近地轨道碎片。这些碎片直径大于10cm,数量为1.5万多个,且拥挤在某些轨道段上,对空间安全的影响最为严重。
(2)在一定时间内清理地球同步轨道碎片。在这一区域,碎片与航天器碰撞仅有一定的概率,清理时间可适当放宽。
(3)中轨道(轨道高度为2 000~25 000km)区域碎片暂可不清理。因为工作卫星与碎片的总和数量到目前为止还处在安全状态。
2)近地轨道碎片的清理要求及方法
(1)碎片直径大于1m,质量约在几百千克到1t之间的碎片,在近地轨道估计占该区域碎片总数量10%以上,这个数值是变化的,当发生卫星碰撞时,其比例会增加,必须尽快采用主动清理碎片的方法。
(2)碎片直径在0.1~1m 之间,可以被实时观测,数量约10 000~12 000个,目前处在比较危险程度。应在规定时间内采用主、被动清理方法。紧急情况下,可以暂时采用规避轨道机动方法,但是需要耗费航天器的燃料。
(3)碎片直径在1~10cm 之间,这是目前最难处理的碎片,质量一般小于几千克,有的仅有几十克。由于无法跟踪观测,数量又很大(约十几万个),其危害程度不尽相同。可分别采用可展开/贮存金属网捕获碎片方法或被动清理碎片的方法;对直径在10cm 左右的碎片,采用喷射方法清理也是一个较好的措施。
新的观测系统(例如“空间篱笆”)开始使用,则可以根据观测结果,采用更有效的清理方法。
(4)碎片直径小于1cm,质量低于十几克,其数量极大,但相对危害性较小,一般可以忽略。在必要时,对卫星关键部位和易损表面加装防撞设备。也可以在必要时,喷射出一些物质附着在碎片上面,使其变成较大球状,以加大气动阻力,使碎片提早离轨。
3)地球同步轨道碎片的清理原则和要求
目前在该区域碎片估计在几百个以上,但直径较大,地面上能观测到,目前发生碰撞概率较小。但是地球同步轨道,倾角为零,在这条狭带内,一旦发生碰撞,经济损失会很大,同时对全球军用和民用通信影响更为严重。为此应该在规定时间内逐步清理。清理碎片采用主动方式比较合适,特别是采用自主式有控推力的方法。若不能采用自主式时,可用机器人抓捕,然后把碎片推至弃置轨道。在轨航天器可采用规避轨道机动方法。
4.2 对将来发射卫星的碎片清理原则和要求
在条件成熟时,应规定所有发射入轨的卫星必须具备清理自身碎片的能力,或者由他人帮助清理(例如“轨道服务公司”),清理费用由卫星所有者支付。“轨道服务公司”必须要有严格的组织和完善的国际监督,例如在联合国有关组织管理监督下经营。根据卫星大小和轨道高低,对其自备清理碎片能力分别有如下要求:
1)近地轨道
(1)大、中型卫星(>1 000kg),要有自备离轨(进入大气层)能力,采用推力主动离轨方法,最理想的是具备固体小火箭,其次为预留液体燃料;
(2)小卫星(<1 000kg),采用被动系留离轨、机器抓捕等主动清理方法;
(3)微卫星和纳卫星(<100kg),卫星应装有微型/轻型离轨终端器或冲气设备(加大气动阻力等),采用被动离轨方法。
2)地球同步轨道
由于这里大部分都是大、中型卫星。可采用自备推力离轨方法,把碎片推至弃置轨道。还可采用机器人抓捕,集中一定碎片数量后,送入弃置轨道。废弃卫星和故障卫星在规定时间内不能离轨时,可由“轨道服务公司”清理。
3)其他地球轨道(<36 000km)
均应具备“碎片轨道清理服务”功能,清理发生故障或碰撞所产生有危害的碎片。
采取以上清理措施之后,现有空间碎片数量经过若干年,会逐渐减少,最后处在一个安全水平。同时新发射卫星又有自备清理碎片能力。这样,在达到上述两项要求以后,就可保持一个安全清洁的空间环境,宝贵的空间资源得以长久被使用。
5 清理空间碎片方法
清理空间碎片方法比较多,下面讨论的各种空间碎片清理方法都是针对第4节所述情况,根据轨道高低,碎片大小和数量等不同的因素,分别采用不同方法。清理空间碎片的方法可分为3种:(1)被动清理方法。不消耗能源,仅依靠外界自然因素来清理碎片,使碎片提早离轨。(2)主动清理方法。需要消耗能源。(3)混合清理方法。主、被动两者相结合。这些清理方法,有一部分还处在研究设计阶段,离实际应用有一定距离,随着技术发展,今后将有较大应用价值。
每种清理方法还包括自主和非自主方式。自主方式是指依靠碎片对象本身具备的能力来清理,非自主方式是通过外力施加碎片对象,达到清理目的。为此主动或被动清理方法都有自主和非自主方式。
5.1 被动清理空间碎片方法
被动清理空间碎片有多种方法,这里仅讨论针对本文第4节所需要的几种。
1)电动系绳离轨终端器[6]
空间系绳早在1970年由意大利人发明。美国的TUI系绳公司经过十几年研制,最后提出了称为“电动系绳”的离轨终端器,其结构原理如图4所示。图4中下端有一个小盒,存放导电带,长度根据需求来决定,一般几十米到几千米。卫星工作时导电带储存在小盒里,卫星寿命终止后,小盒自动(或地面站指令)打开,伸出的导电带有电流产生,与地磁力相互作用产生电动阻力,导电带与卫星形成重力梯度稳定姿态结构,同时也产生气动阻力,迫使卫星提早离轨,最终进入大气层烧毁。该公司根据卫星质量大小和轨道高低(一般都在近地轨道),可生产多种电动系绳离轨终端器。
例1:轻型离轨终端器[7],导电带长30 m、宽8cm,收存体积为100mm×83mm×5mm,质量约80g。这种轻型离轨终端器用于微卫星和纳卫星。
例2:适用于近地轨道大、中型卫星的离轨器,采用铝制导电带,长7.5km、质量15kg,同时附有15kg末端质量(可增加重力梯度稳定度和气动阻力)。其离轨时间与近地点高度和轨道倾角有关,如图5所示。如1 500kg卫星,轨道近地点高度600km、倾角75°,由图5可知大约在80d后会下降到200km 高度,然后很快下降,最后烧毁在大气层中。若没有安装此设备,卫星在轨停留时间至少也要20年。
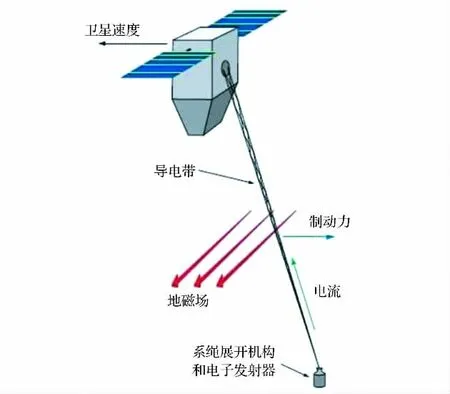
图4 电动系绳离轨终端Fig.4 Electric tether de-orbit terminal
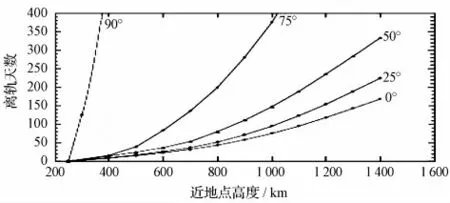
图5 离轨天数和轨道近地点高度与倾角关系Fig.5 Relationship between deorbit time and orbital altitude and inclination
2)气动阻力离轨装置[8]
使用冲气装置形成气球或抛物面形状,提高气动阻力,迫使卫星提早离轨。图6表示美国贝尔公司在2004 年研制的“冲气加固拖曳结构”(Towed Rigidizable Inflatable Structure,TRIS)。图6中有3条支架(由系绳构成)连接一个大面积的抛物面天线,平时收缩在小盒里。当卫星工作寿命终止后,打开伸展支架,冲气成为抛物面。近地轨道质量在500~1 500kg 的卫星,所需TRIS 离轨装置的质量、体积和成本如表2所示。离轨装置一般约占卫星总质量的1%~1.5%。对500~600km 圆轨道卫星来说,其离轨时间大约在0.5~1年之间。
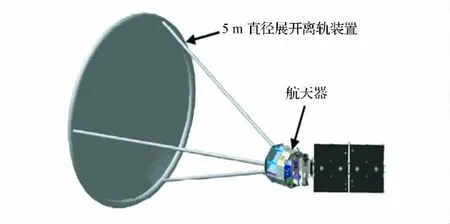
图6 冲气加固拖曳结构Fig.6 Towed rigidizable inflatable structure(TRIS)
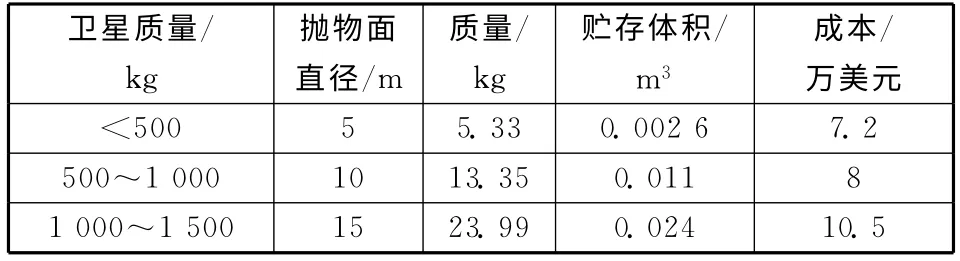
表2 TRIS离轨装置的质量、体积和成本Table 2 TRIS mass,volume and cost of de-orbiting device
另一种结构为冲气气球的气动阻力离轨装置,如图7(a)所示。卫星工作寿命终止后,释放出压缩氦气形成气球。如卫星质量1 200kg、轨道高度为830km,冲气成气球直径为37m,1年时间离轨,进入大气层烧毁。若没有此装置,卫星将在轨道上停留30~40年。气动阻力离轨装置还有一种四方形结构,如图7(b)所示。

图7 气动阻力离轨装置示意图Fig.7 Aerodynamic drag de-orbiting device schematic
3)太阳辐射压力离轨方法[9]
在地球同步轨道利用大型太阳帆指向太阳,产生辐射压力,经过连续不断工作,卫星轨道高度将产生变化,最终迫使卫星离开地球同步轨道。这种操作一般都由地面站执行,产生足够辐射压力需要较长操作时间。由于在地球同步轨道上太阳辐射压力是卫星的最主要摄动力,因此该方法适用于地球同步轨道,特别是当卫星推力器发生故障时,使用这方法作备份,非常有效。
4)制动帆离轨方法
在卫星上通过支架伸展薄膜形成各种形状的帆,从而产生制动阻力,迫使卫星提早离轨。可为各种卫星研制大小不同的制动帆,一般帆面积为几平方米到几十平方米,如图8所示。这种装置质量轻、结构简单、成本低,特别适用于近地轨道的微小卫星。

图8 轻型制动帆离轨装置Fig.8 Light braking panels de-orbit device
5.2 主动清理空间碎片方法
1)推力离轨方法[10]
采用各种推力器,迫使卫星离轨,这种方法特点是作用效果明显、离轨时间短、燃耗较大、成本高。2002年欧洲航天局研究对比了不同种类卫星采用的推力离轨方法,表3列出比较结果,表中使用阿拉伯数字1~6,分别表示其效果从最佳到最差的6个等级(此指表3中具体轨道比较结果,若改变轨道,比较结果可作参考,可能会有一些小变化)。
由表3可知,固体推进器适用于各种卫星,其次广泛适用的是单组元推进器,电推力器对微卫星和纳卫星均不适用,冷气推力器对一般卫星不太适合,可考虑用于纳卫星和微卫星。

表3 各种推力器对不同卫星离轨比较结果Table 3 De-orbit results of various thrusters on different satellites
采用推力离轨方法不仅需要耗费较多燃料,而且控制精度的要求较高,若只有推力但无精确控制的能力,则离轨时间会比较长。
2)空间机器人方法
采用具有轨道机动能力的空间机器人,对选定的空间碎片进行抓捕,并集中起来处理。采用和发展这种方法往往与军事用途有关。该技术有2个难点,一是如何把抓捕到的碎片集中起来;二是如何清理这些碎片,又不影响到空间环境。还有一种方法是在具有机动能力的微小卫星上安装机械臂,作用效果和空间机器人类似[11]。图9 表示这两种空间机器人抓捕碎片的外观图。
3)膨胀泡沫方法[12]
利用卫星向空间碎片喷射泡沫,从而增加碎片的面积质量比,提高其气动阻力,最终导致碎片提早离轨,坠入大气层烧毁。这种方法比较适用于近地轨道的各种碎片。碎片经过泡沫包装后,质量密度一般为0.5~1kg/m3。喷射泡沫过程如图10所示。

图9 空间机器人抓捕碎片Fig.9 Space robots capture debris

图10 向空间碎片喷射泡沫过程Fig.10 Spray foam to space debris
碎片离轨时间和泡沫直径大小有关,可根据所选定空间碎片的大小和质量,确定应该喷射泡沫的程度(直径)。
喷射泡沫装置可安装在近地轨道的卫星或飞船上,“喷射泡沫机构”由泡沫贮存箱、可控机械手和喷管等组成;地面的空间碎片观测系统选定具体碎片目标,设定喷射条件,针对性强,不会产生其它负作用。
5.3 混合清理空间碎片方法
该方法同时具有主动和被动相结合的清理碎片功能。以下介绍两个实例。
1)制动帆和电动系绳混合方法[13]
立方体卫星由欧洲航天局出资组织,英国萨瑞卫星技术公司承担研制。2011 年上半年已经完成初步研制工作。立方体卫星帆的存贮和展开结构如图11所示。
柔性制动帆贮存在双立方体单元上端部件中,下端部件为控制电子设备。当需要时展开成正方形帆,一般面积为4~25m2,然后展开的帆和一定长度系绳连接在一起,成为一套完整的混合清理碎片装置,最后通过空间对接,把混合装置固连在碎片卫星上,其结构原理如图12所示。
这种混合清理碎片装置同时具有帆制动和电动系绳两种作用的离轨功能,离轨时间更短。此方法特别适用于不具备离轨功能的卫星。目前的技术难点,是如何把混合装置可靠地与碎片卫星对接与固连,虽然空间交会对接技术目前发展比较成熟,但是对非合作目标(例如空间碎片)的对接,仍然存在一定的技术难度。
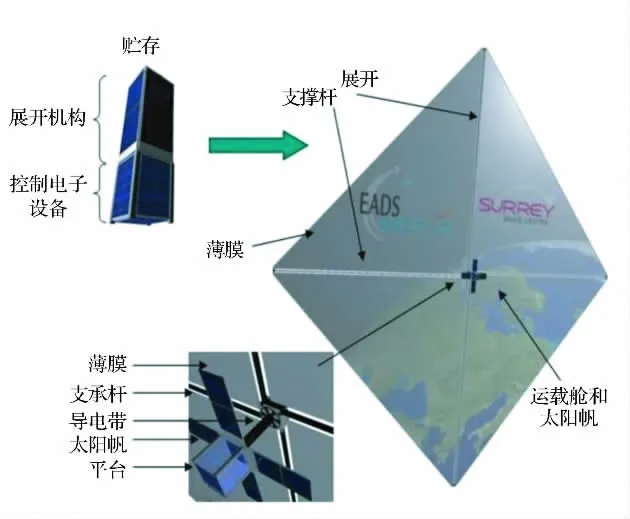
图11 立方体卫星帆贮存和展开结构图Fig.11 Cubesat panels storage and expansion structure
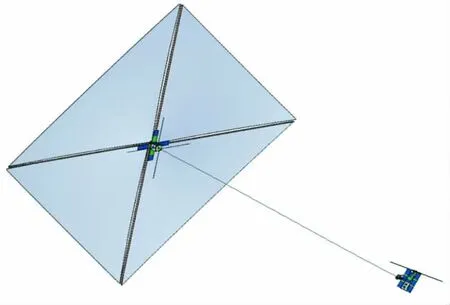
图12 制动帆和电动系绳混合系统展开结构图Fig.12 Hybrid system of brake panels and electric tether to expand the structure
2)可展开/贮存金属网捕获碎片方法
用金属丝制成巨型捕获网,直径可达几百米到几千米,当卫星飞行任务完成后,根据地面站指令打开卫星上的金属网,开始捕获碎片。该方法较适合捕获近地轨道上直径小于10cm 的碎片。完成碎片捕获任务后,卫星向金属网通电,从而与地磁场相互作用,产生制动力,使卫星离轨。该方法在地面站控制下,一般不会捕获不该捕获的物体。可展开/贮存金属网,已经由日本宇宙航空研究开发机构(JAXA)和日东制鱼网公司联合研制成功,但尚未进行空间飞行验证,其结构示意如图13所示。

图13 可展开/贮存金属网捕获碎片示意图Fig.13 Expand/storage structure schematic of metal mesh to capture debris
6 结束语
空间碎片已成为人类非常关注的问题。目前空间碎片数量急增,处于危险阶段。除了制定具有国际法律效力的空间碎片管理法规以外,同时也必须积极开展研究有效适用的清理空间碎片方法。
(References)
[1]The NASA Orbital Debirs Program Office.Orbital debris quarterly news[DB].Washington:NASA.Volum 15,Issue 21,2011
[2]Johnson T P.Orbital debris:the growing threat to space operations,AAS10-012[C]//33rd Annual AAS Guidance &Control conf.San Diego:AAS,2010
[3]Payne T P,Morris P R.The Space Surveillance Network(SSN)and orbital debris,AAS10-012[C].33rd Annual AAS Guidance & Control conf.San Diego:AAS,2010
[4]Stuttard M.Space debris—will it get better or worse?[EB/OL].[2012-01-28].http://kn.theiet.org/communities/satellite/resources/matthew-stuttard.cfm?tpye=.pdf
[5]Global Security org.Space Fence(AFSSS)[EB/OL].[2011-05].http://www.globalsecurity.org/space/systems/space-fence.htm
[6]Hoyt R,Forward R.The terminator tether TM:autonomous de orbit of LEO spacecraft for space debris mitigation,AIAA 00-0329[C]//Proceedings of the 38th AIAA Aerospace Sciences Meeting & Exhibit.Washington:AIAA,2000
[7]林来兴.现代小卫星的发展及轨道垃圾问题[J].航天器环境工程,2011,28(4):307-312
Lin Laixing.The development of modern small satellite and orbital debris[J].Spacecraft Enviroment Engineering,2011,28(4):307-312(in Chinese)
[8]Beckett D,Cassapakis C.Rapid de-orbit of LEO space vehicles using Towed Rigidizable Inflatable Structure(TRIS)technology:concept and feasibility assessment,SSC04-IV-3[C]//Proceedings of the AIAA Small Satellite Conference.Washington:AIAA,2004
[9]Borja A J,Tun D.De-orbiting process using solar radiation force[J].AIAA Journal of Spacecraft and Rockets,2006,43(3):685-687
[10]Janovsky R.De-orbit Strategies,excutive summary,EOL-OHB-ES-001[R/OL].Bremen:OHB-System,2002[2011-12-09].http://esamultimedia.esa.int/docs/gsp/completed/comp
[11]Nishida S.Space debris removal system using a small satellite[J].Acta Astronautics,2009,65:95-102
[12]Andrenucci M,Pergola P,Ruggiero A.Active removal of space debris-expanding foam application for active debris removal,ACT-10-641[R].Paris:ESA,2011
[13]Visagie L,Theodorou T.Hybrid solar sails for active de orbit removal,ACT-10-6411b[R].Paris:ESA,2011