级联型多电平变换器单元电路控制器设计
2012-12-25郭殿林陈国民常国祥
郭殿林, 王 欢, 陈国民, 常国祥
(黑龙江科技学院 电气与信息工程学院,哈尔滨 150027)
级联型多电平变换器单元电路控制器设计
郭殿林, 王 欢, 陈国民, 常国祥
(黑龙江科技学院 电气与信息工程学院,哈尔滨 150027)
根据新型中大功率级联型多电平拓扑特点,设计了以双向全桥变换器单元为控制对象,FPGA为控制核心的单元电路控制器。其移相PWM驱动信号采用有限状态机方式实现;PI控制器采用离散算法结构,利用LUT设计;A/D控制器采用AD7823 A/D转换器,并通过DSP传送相关控制参数。仿真实验表明:该控制器可实现单元电路闭环控制,输出电压为7电平。该研究为高压大功率四象限变频器实验奠定了基础。
DSP;FPGA;双向直流变换器
传统级联型变频器的电压胞一方面由于其结构特点无法处理再生能量,不能应用于需四象限运行的变负荷拖动系统;另一方面,不控整流桥使输入电流含有丰富的谐波,对电网造成严重的谐波污染,上述问题限制了其在轧钢机、电力牵引等要求能量双向传递的负载场合的应用。因此,开展级联型多电平逆变器四象限运行的研究,具有理论意义和实用价值。文献[1]采用PWM整流器与传统H桥逆变器相结合的方式实现了四象限运行,但该系统仍然依靠工频变压器实现隔离,变压器数目多且体积庞大,效率较低。为此,笔者提出将双向直流变换器应用于四象限运行逆变器,拓扑采用高频变压器隔离,较好地解决了高压电机系统的四象限运行问题。
1 系统电路与控制策略
1.1 系统电路
图1为系统整体电路。图中给出A相的具体电路,原有的二极管整流及电容滤波部分采用开关管整流器,整流和逆变部分均采用级联型结构[2]。每个变换单元的双向直流变换器如图2所示。

图1 系统整体电路Fig.1 Principle frame of system

图2 双向直流变换器Fig.2 Bi-directional dc/dc converter
1.2 控制策略
双向直流变换器前级向后级传送能量时,前级逆变,后级整流工作;当后级向前级传送能量时,后级逆变,前级整流工作。逆变采用移相控制方式,一个桥臂的两个开关管的驱动信号180°互补导通且中间有死区,两个桥臂的导通角相差一个相位,即移相角。通过调节移相角的大小来调节输出电压。由图1可知,当级联数为N时,每相存在N个双向直流变换器单元需要控制,若依靠一个控制核心无法完成,所以,笔者提出以DSP为总控制器负责传送相关参数,以FPGA为单元控制器,对各个单元进行闭环控制。前级向后级传送能量时,采用PWM1~PWM4控制前级,完成闭环控制,PWM5~PWM8无信号输出;后级向前级传送能量时,PWM5~PWM8控制后级,开环工作,PWM1~PWM4无信号输出。FPGA单元控制框图如图3所示。图中 DS、AS、CS、WR、reset、former-en、back-en、clk 分别为数据线、地址线、片选线、写信号、复位信号、整流使能、回馈使能和时钟,FPGA的时钟clk与DSP同步,由DSP发出控制信号并给出CLOCKOUT时钟信号。

图3 单元控制框图Fig.3 Scheme of cell control
2 单元电路控制器设计
2.1 移相PWM 模块
双向直流变换器不管是输送能量还是回馈能量,均要求有两个四路移相PWM信号,且移相PWM驱动信号采用有限状态机方式实现。以前级驱动控制为例,将如图4所示一个周期的PWM信号分为8个状态,通过不断循环来实现[3-5],分别为 t1(Q2-off)、t2(Q1-on)、t3(Q3-off)、t4(Q4-on)、t5(Q1-off)、t6(Q2-on),t7(Q4-off)、t8(Q3-on)。其中,Q1-off、Q2-off、Q3-off、Q4-off为死区时间,持续时间用 deadtime 表示;Q1-on、Q2-on、Q3-on、Q4-on 为开关导通时间,前两者的持续时间用ratio表示,后两者持续时间用T/2-ratio-deadtime表示,T为一个开关周期。每一个时间段采用计数器方式延时,当计数与设定的赋值相等时,则清零转入下一个状态。
PWM模块启动后将四路输出均置为低电平,然后开始状态循环,输出移相控制波形。在输出控制信号过程中可以修改移相角,移相角对应于ratio的时间,所以只需修改ratio值即可。仿真波形如图5所示,其中,使能信号enable与复位信号reset均在高电平时有效,reset将输出状态复位为零状态。由仿真波形可知,模块的输入输出关系与设计相同,达到了设计要求。

图4 开关管驱动波形Fig.4 Gate drive waveforms of transistors
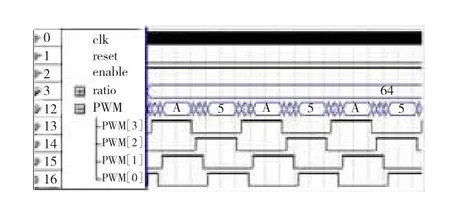
图5 FPGA仿真波形Fig.5 Waveforms of FPGA simulation
2.2 PI控制器
传统基于FPGA的控制器未关注硬件资源的优化使用问题,通常要求有大量的乘法器和加法器。为节省乘法器和加法器,提高系统运行效率,文中采用离散算法结构,利用LUT设计。
文献[6]中改进的PI传递函数,即

式中:U(s)——PI调节信号;
K、b、Ti——控制器参数;
Ur(s)——基准信号;
Y(s)——反馈信号。
对式(1)离散化处理后得

式中:k——第k次瞬时采样次数;
T——采样周期;

式(1)、(2)虽然可以使用,但需要较多的乘法器,因此将式(2)继续变换,得到:




表1 比例运算查表值Table 1 LUTp
2.3 A/D控制器
A/D转换器采用AD7823,它是高速低压八位A/D变换器,为串行接口,需要较少的数据线,且FPGA的运行速度快足以为其提供高速的串行数据。根据该A/D转换器的时序,设计了A/D控制器,SAMPLE是启动信号上升沿启动,转换完成并传送到控制器ADIC,该控制器给出请求信号eoc和并行数据DB。控制电路与仿真波形如图6所示。由图可知,仿真波形与该转换器时序一致。

图6 FPGA控制电路与仿真波形Fig.6 FPGA control circuit and simulation waveforms
3 仿真实验
完成系统设计后,在实验室制作了1 kW样机,其输入直流电压为200 V,输出电压为100 V,级联单元数为3,高频变压器匝数比为21∶12,变压器漏感1.4 μH,选用的开关管为 SPW47N60C3,高压侧开关管并联电容10 nF/1 000 V,低压侧开关管并联电容10 nF/600 V,Lr1=12 μH,Lr2=6.5 μH,开关频率为20 kHz,选用的 FPGA 芯片为 EP1K100QC208 -3,负载为阻感负载,采用电动运行方式。图7为FPGA顶层设计图。图8a为驱动波形,横轴为时间,每格25 μs,纵轴为电压幅值,每格 2 V,死区时间为2.2 μs;图8b为高频变压器原边电压波形,横轴为时间,每格10μs,纵轴为电压幅值,每格100V;图8c是负载变化后单元电路直流母线电压波形,始终保持恒定,横轴为时间,每格5 ms,纵轴为电压幅值,每格100 V;图8d是三单元级联逆变器输出A、B相相电压。由图可知,输出电压为7电平,两相之间相差120°,说明该控制器满足设计要求。

图7 FPGA顶层设计Fig.7 FPGA top hierarchy module

图8 系统实验波形Fig.8 Systems experiment waveform
4 结束语
以FPGA为控制核心,设计了双向全桥单元变换器控制电路。实验结果表明该控制器能够与DSP正常通信并完成电压闭环控制。以该单元变换器为电压胞,级联型逆变器采用载波移相脉宽调制技术,可以输出7电平电压波形。该研究为高压大功率四象限变频器实验奠定了基础,但该控制电路数字化后的系统动态稳定性和可靠性仍需进一步完善。
[1]吴凤江,赵 克,孙 力,等.一种新型四象限级联型多电平逆变器拓扑[J].电工技术学报,2008,23(4):81-85.
[2]HIROFUMI AKAGI,SHIGENORI INOUE.Medium-voltage power conversion systems in the next generation[C]//5thInternational Power Electronics and Motion Control Conference.[S.l.]:IPEMC,2006:90-93.
[3]HUA GUICHAO,LEE F C.Soft-switching techniques in PWM converters[J].IEEE Trans on Industrial Electronics,1995,42(6):595-603.
[4]严仰光.双向直流变换器[M].南京:江苏科学技术出版社,2004:121-135.
[5]SWINGLER A D,DUNFORD W G.Development of a bi-directional DC/DC converter for inverter/charger application swith consideration paid to large signal operation and quasi-linear digitalcontrol[C]//33thAnnual IEEE Power Electronic Specialist Conference.Australia:PESC,2002:103-106.
[6]WITTENMARK B,ASTROM K J,ARZEN K E.Computer control:an overview,technical report design and implementation of modular FPGA-based PID controllers[M].Sweden:Department of Automatic Control, Lund Institute of Technology, 2003:40-50.
[7]CHAN Y R,MOALLEM M,WANG W.Efficient implementation of PID control algorithm using FPGA technology[C]//43rdIEEE Conference on Decision and Control.[S.l.]:CDC,2004:34 -36.
Design of cascade multilevel converter unit circuit controller
GUO Dianlin, WANG Huan, CHEN Guomin, CHANG Guoxiang
(College of Electric& Information Engineering,Heilongjiang Institute of Science& Technology,Harbin 150027,China)
This paper describes the design of unit circuit controller marked by bi-directional fullbridge converter unit used as control object and FPGA as control core,according to the new high power in the cascade type level topological characteristics.The steps consist of obtaining the PWM signal phase shifting driven by finite state machine way,accomplishing PI controller using discrete algorithm structure of LUT design;achieving A/D controller by AD7823 the A/D converter,and realizing transference of related control parameters through the DSP.Simulation results show that the controller can achieve unit closed-loop control circuit and the output voltage for 7 level.The study lays a foundation for high pressure high-power inverter four quadrant experiment.
DSP;FPGA;bi-directional dc/dc converter
TM46
A
1671-0118(2012)05-0526-04
2012-03-14;
2012-06-25
黑龙江省教育厅科学技术研究项目(11551425)
郭殿林(1972-),男,内蒙古自治区乌盟人,副教授,硕士,研究方向:电力电子与电力传动,E-mail:gdl-wyq@163.com。
(编辑 荀海鑫)