纯电动汽车回馈制动的模糊算法
2012-12-23张桂凤张子建谢蓄芬王国新
张桂凤, 张子建, 谢蓄芬, 王国新
(1.黑龙江科技学院 电气与信息工程学院,哈尔滨 150027;2.哈尔滨工业大学 机电工程学院,哈尔滨 150001)
纯电动汽车回馈制动的模糊算法
张桂凤1, 张子建2, 谢蓄芬1, 王国新1
(1.黑龙江科技学院 电气与信息工程学院,哈尔滨 150027;2.哈尔滨工业大学 机电工程学院,哈尔滨 150001)
为改善电动汽车的再生制动能量回收率,设计了一种以驾驶员制动、车速、电池荷电状态(SOC)和电池组温度为输入参数,以再生制动力为输出的Sugeno型模糊算法控制器。通过改进ADVISOR中VEH_SMCAR车模型的原有制动力分配规则,电池SOC、电池电流和电机转矩得到提高。仿真结果表明:改进的模糊控制算法和制动力分配规则合理可行,在保证车辆良好制动性能的前提下,可以降低电池在一个CYC_UDDS循环工况下的耗电量,提高能量利用率,有效延长电动汽车一次充电续驶里程。该研究为纯电动汽车再生制动控制策略的制定提供了参考。
回馈制动;模糊算法;ADVISOR;制动力分配
0 引言
回馈制动是指在保证车辆制动性能的前提下,通过电动机/发电机或者高速飞轮等装置,将车辆制动过程中的动能或势能转化为其他形式的能量储存在装置中,实现能量回收再利用。对于纯电动汽车来说,能量的回收是通过电动机和发电机不断变换来实现的,能量的存储是通过蓄电池组实现[1]。回馈制动可以有效提高能量利用率,延长电动汽车的一次充电续驶里程。目前,国内外在回馈制动方面已经做了大量工作,并取得了一些成果[2-4]。Gao Yimin等提出了理想制动力分配曲线、能量最优回收和并行分配策略等来求解再生制动力[5],虽然理想制动力分配模型能最大程度的回收能量,但车辆的重量、重心位置和行驶工况不断变化,如何实现机电制动力的分配并保证车辆的良好制动性能,该算法存在一定困难。Gao Hongwei等基于神经网络算法求取再生制动力[6],但该算法计算复杂,可靠性较低。Yao Jie和Zhang Jingming等运用模糊算法计算再生制动力[7-8],但在模糊算法的实现过程中,仅考虑了影响再生制动力因素中的车速、驾驶员制动需求、电池荷电状态(SOC)中的两个因素,并未考虑影响电池最大充电电流的温度等因素。因此,文中在求取再生制动力方面,设计了一种考虑驾驶员制动需求、车速、电池SOC和电池组温度的Sugeno型模糊算法控制器,并根据已有理论,对模糊算法的隶属度函数和模糊规则进行了优化。
1 电动汽车再生制动系统
电动汽车再生制动系统如图1所示。驾驶员根据车辆行驶状况,决定踩下制动脚踏板的角度和快慢,脚踏板传感器将驾驶员的制动需求发送给模糊算法控制器,模糊控制器根据前后轮和机电制动力分配规则,分配前轮机械制动力、前轮电制动力和后轮制动力。
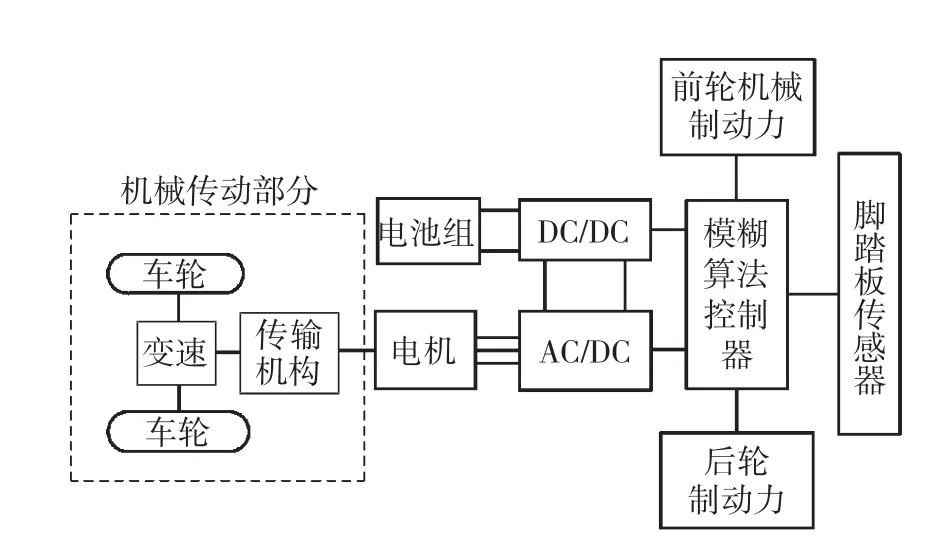
图1 电动汽车再生制动系统Fig.1 Block diagram of regenerative braking system
为了保证车辆制动过程中的安全性,前后轮制动力分配规则采用ADVISOR中车辆模型VEH_ SMCAR自带制动力分配方案;机电制动力分配采用将尽可能多的制动力分配给电制动力,只有在电制动力无法满足要求时,由机械制动力进行补充,车辆的制动力分配规则如图2所示。

图2 前后轮车速和制动力分配比例关系Fig.2 Relationship between vehicle speed and force distribution
2 再生制动力的求解
2.1 再生制动力的影响因素
再生制动力的值主要受以下几个因素的影响:
(1)制动需求。当驾驶员踩下制动脚踏板的角度比较大时,说明车辆的制动需求力比较大,车辆需要尽快停下来,此时,应尽量增加机械制动力所占的比例;当驾驶员踩下制动脚踏板的角度比较小时,说明车辆的制动需求力比较小,车辆可以在很长的距离内减速行驶,此时,可以适当增加电制动力所占比例。
(2)车速。电制动力的大小还受车速的影响。当车速较高时,电机处于较高的转速,电机回收能量的效率比较高,此时应尽可能提高电制动力的比例;当车速较低时,电机转速也较低,电机回收能量的效率很低,此时,应减小电制动力所占比例。
(3)电池SOC。电池的SOC决定了电池是否允许充电,因此,也影响了电制动力的大小。当电池SOC比较低时,证明电池处于比较适合充电状态,因此,此时电制动力所占比例可以大些;当电池SOC比较高时,电池不适合充电,此时,应减小电制动力所占比例。
(4)电池组温度。电池组温度影响了电池的最大允许充电电流,由于电机的转速越高,反馈电流越大,因此,电制动力值的大小也受电池组温度的制约。当温度比较高或比较低时,电池的最大允许充电电流比较小,为了保证电池的充电安全性,电制动力所占比例要相应的减小;当温度适中时,电池的最大允许充电电流比较大,为了提高能量的回收效率,电制动力的比例可以相应的增大。
2.2 模糊算法控制器设计
基于上述分析,文中,模糊算法控制器输入包括制动力需求B、车速v、电池SOCQ和电池组温度θ 4个变量,以再生制动力F作为输出,采用Sugeno型模糊算法。为了提高系统的精度,各输入参数的隶属度函数A(x)采用S型。
2.2.1 输入
制动力需求的隶属度函数如图3a所示。模糊子集LB表示驾驶员的制动需求比较小,车辆可以在很长的距离内实现制动即可;模糊子集MB表示在一般制动需求情况下;模糊子集HB表示驾驶员制动需求比较大,车辆需要在短时间和短距离内实现制动。
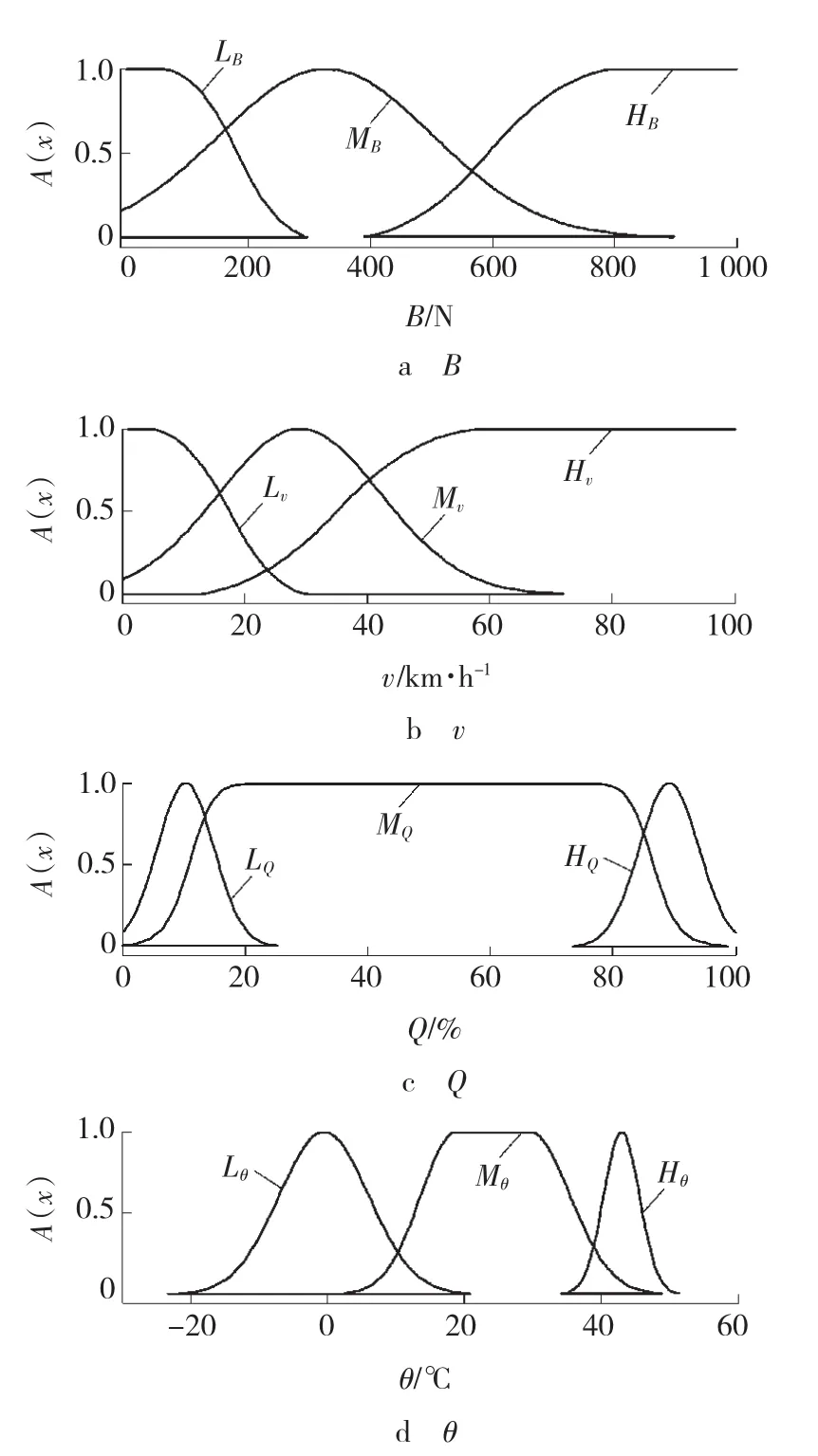
图3 输入变量隶属度函数Fig.3 Membership function of input variables
车速隶属度函数如图3b所示。模糊子集Lv表示车速较低,如车辆刚起步或者即将停车的时候;模糊子集Mv表示车辆速度适中的时候,如在城市工况下;模糊子集Hv表示车辆行驶速度较高,如在高速公路或直线行驶时。
电池SOC隶属度函数如图3c所示。当电池SOC在LQ阶段(小于10%)时,电池的内阻较大,电池不适合大电流充电;当电池SOC在MQ(10%~90%)阶段时,电池的可充电电流增加,电池可以以较大的电流充电;当电池SOC在HQ阶段(大于90%)时,为防止锂的沉积,电池可接受的充电电流下降[9]。
电池组温度隶属度函数如图3d所示。电池组温度在-20~20℃时,电池组允许的充电电流在逐渐升高,充电电流不宜过大;当温度在20~45℃时,电池允许的最大充电电流比较大,因此,此时可采用大电流充电;当温度在45~50℃时,电池允许的最大充电电流明显减小;当温度低于-20℃或者高于45℃时,为防止对电池的伤害,该两种情况下,禁止对电池充电[8]。
2.2.2 输出
文中,模糊控制器的输出是再生制动力。再生制动力的模糊集和论域为:(F0,F1,F2,F3,F4,F5,F6,F7,F8,F9,F10)={0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1.0}。
2.2.3 模糊规则
根据各种因素对再生制动力的影响情况,制定的模糊规则如表1所示。受篇幅限制,文中仅给出部分数据。
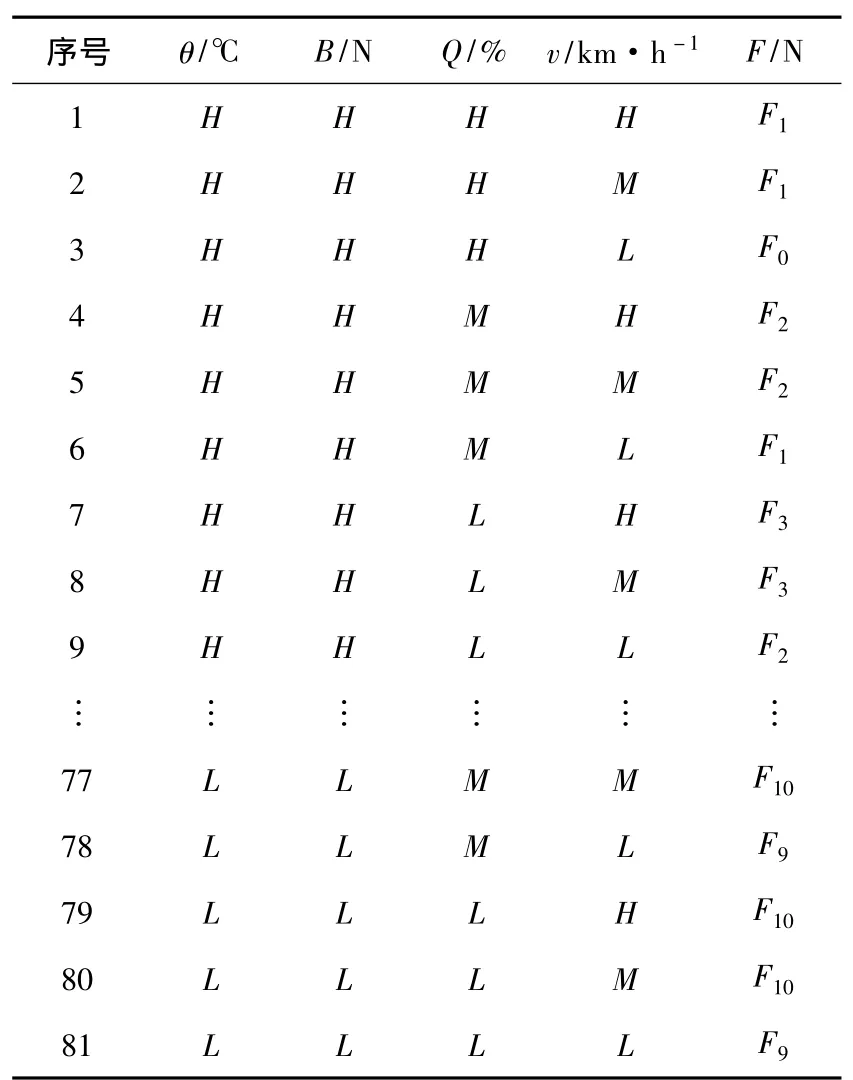
表1 模糊规则Table 1 Fuzzy rules
3 仿真分析
3.1 控制算法
根据驾驶员的制动需求,按照ADVISOR软件中自带车辆模型VEH_SMCAR前后轮制动力分配规则,分配前后轮制动力,根据图2中求得的再生制动力,合理分配前轮中机电制动力的分配比例,提高能量回收率,其算法流程如图4所示。

图4 制动力分配算法流程Fig.4 Structure of braking force distribution algorithm
3.2 相关数据
文中选用美国可再生能源实验室NREL(National Renewable Energy Laboratory)开发的车辆仿真软件ADVISOR(Advanced Vehicle Simulator,高级车辆仿真器)进行仿真,选择的车辆模型和路况参数为:车辆质量为592 kg,货物质量为136 kg,车轴距为2.6 m,前面空气接触面积为2.0 m2,重心高度为0.5 m,车辆静止时,前轮重力分配比例为0.6,储能装置为Hawker Genesis 12V26Ah10EP VRLA蓄电池;电机选MC_AC75;循环工况选择CYC_UDDS。
根据以上信息和分析,用SIMULINK工具箱修改、替换ADVISOR自带车辆模型VEH_SMCAR的相关模块和文件,得到如图5所示的再生制动仿真模型。

图5 再生制动仿真模型Fig.5 Regenerative braking simulation model
3.3 仿真结果
将修改后的再生制动力求取和制动力分配模型导入ADVISOR软件中,得出仿真结果,其与原有模型仿真结果的比较如图6所示。

图6 仿真结果Fig.6 Simulation results
由图6a可以看出,改进模型在车速方面与原有模型一致,表明改进模型能够保证车辆的制动安全性。图6b表明,在电池充电方面,改进模型优于原模型,即改进模型可以实现更多的能量回收到电池,在一个CYC_UDDS循环工况下,电池SOC大约提高了10%,提高了能量利用率。从图6c可以看出,车辆的回馈电流在改进模型中也得到了提高,表明电池的荷电状态得到提高,有更多的能量储存到电池中。通过图6d可以看出,车辆实际达到的正转矩曲线在修改前后重合,即车辆的制动效能没有改变;但是修改后,模型的负转矩明显增加,这说明在制动过程中,有更多的能量实现回馈。从图6e可见,改进模型的电池温度升高小于原有模型的电池温度,所以,不会造成电池过充现象,可以有效保证电池的安全。
4 结束语
文中根据电动汽车再生制动的特点和约束条件,设计了一种以制动、车速、电池SOC和电池组温度4个对再生制动力有显著影响的因素为输入、以再生制动力为输出的Sugeno型模糊控制器。根据该控制器求取再生制动力值,并对ADVISOR中原有电动汽车模型VEH_SMCAR制动力分配规则进行了修改。仿真结果表明,文中提出的控制算法和制动力分配方案可以有效提高电池的充电量,提高能量的利用率,延长了电动汽车一次充电续驶里程。
[1]余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
[2]ZHANG ZIJIAN,XU GUOQING,LI WEIMIN,et al.The application of fuzzy logic in regenerative braking of EV[C]//2010 2nd International Conference on Intelligent Human-Machine Systems and Cybernetics(IHMSC 2010).Nanjing,Jiangsu:IEEE,2010: 124-128.
[3]周 磊,罗禹贡,李克强,等.电动汽车回馈制动与防抱死制动集成控制[J].清华大学学报:自然科学版,2009,49(05): 728-792.
[4]全 力,张德望,朱孝勇,等.基于矢量控制的永磁同步电动机回馈制动的仿真与研究[J].微特电机,2011(03):45-51.
[5]GAO YIMIN,CHEN LIPING,EHSANI M.Investigation of the effectiveness of regenerative braking for EV and HEV[J].SAE International,1999,108(6):3184-3190.
[6]GAO HONGWEI,GAO YIMIN,EHSANI M.A neural network based SRM drive control strategy for regenerative braking in EV and HEV[C]//Proceedings of Electric Machines and Drives Conference(IEMDC 2001).Cambridge:IEEE,2001:571-575.
[7]YAO JIE,ZHONG ZAIMIN,SUN ZECHANG.A fuzzy logic based regenerative braking regulation for a fuel cell bus[C]//IEEE International Conference on Vehicular Electronics and Safety.Beijing: IEEE,2007:22-25.
[8]ZHANG JINGMING,SONG BAOYU,CUI SHUMEI,et al.Fuzzy logic approach to regenerative braking system[C]//International Conference on Intelligent Human-Machine Systems and Cybernetics.Hangzhou:IEEE,2009:451-454.
[9]文 锋,姜久春,张维戈,等.电动汽车用锂离子电池组充电方法[J].汽车工程,2008,30(9):792-795.
Fuzzy logic in regenerative braking of EV
ZHANG Guifeng1,ZHANG Zijian2,XIE Xufen1,WANG Guoxin1
(1.College of Electric&Information Engineering,Heilongjiang Institute of Science&Technology,Harbin 150027,China; 2.School of Mechanical&Electrical Engineering,Harbin Institute of Technology,Harbin 150001,China)
To improve the efficiency of recycling the regenerative brake energy for electrical vehicles,we design a Sugeno’s fuzzy logic controller which has four inputs including driver’s requirement of braking force,vehicle speed,batteries’state of charger(SOC)and batteries’temperature and one output which is the regenerative braking force.We do some improvement on the force distribution of the original model of VEH_SMCAR in ADVISOR,so batteries’SOC,batteries’current and motor’s torque can be increased.The simulation results show the fuzzy control logic and the force distribution regulation are reasonable and feasible,under the conditions of ensuring braking quality,which can decrease the consumption of electrical quantity in a driving cycle of CYC_UDDS,improve the energy usage efficiency and prolong the driving distance of EV per charge.The study can provide reference for the control strategy of the regenerative brake energy for electrical vehicles.
regenerative braking;fuzzy logic;ADVISOR;braking force distribution
U469.72;TP273
A
1671-0118(2012)02-0177-05
2012-02-24
黑龙江省教育厅科学技术研究项目(12521480);中国煤炭工业协会科学技术研究指导性计划项目(MTKJ2011-427)
张桂凤(1976-),女,内蒙古自治区牙克石人,讲师,硕士,研究方向:电气工程与智能控制,E-mail:zgfzgf99@126.com。
(编辑王 冬)
