船用起重机恒张力系统的设计仿真研究
2012-12-21徐化文
徐 伟,徐化文
(四川工程职业技术学院,四川 德阳 618000)
船用起重机是在海洋环境中进行起吊作业的特种起重机械。起重机在海上作业的过程中,通过起重机的回转和变幅,改变起重臂的角度及位置,并通过主、副绞车的收、放绳,将货物由补给船移至目标船。
由于作业船舶会因风浪的影响,而相对上下运动,在起吊或释放的过程中,货物会与上升的船体发生二次碰撞;已放落到甲板上的货物,也可能由于船体的下沉而出现再次悬空的现象,这给海上的安全有效作业,造成了很大的困难。
为在恶劣海况条件下,将货物安全可靠地从补给船移到目标船上,起重机除需要具有较高的起吊速外,还应具有起吊钢丝绳的恒张力控制功能,这可以使起吊钢丝绳始终保持在张紧状态,以减小补给船升沉运动和波浪起伏运动对货物和船体产生的冲击。
本文对起重机液压系统的恒张力系统,进行了建模,针对恒张力控制模式进行了仿真,并通过了现场试验验证。结果表明,通过起吊绞车的液压系统控制,能够实现对起吊钢丝绳的恒张力控制,从而大大降低了起重机作业过程中海浪的运动冲击,提高了作业的安全性,进而验证了该设计是可行性的。
1 船用起重机工作原理及恒张力系统
本文研究的船用起重机的结构总成见图1。
船用起重机主要有吊臂、转台、主绞车、副绞车、大钩、小钩及动力装置和控制设备等部分组成。动力装置一般由柴油机或电动机提供动力,动力装置一般置于动力室内,控制设备主要控制起重机的各种动作,一般置于在操作室中。

图1 船用起重机的结构总成
1.1 船用起重机工作原理
船用起重机工作原理是:船用起重机主要通过电机(或柴油机)提供动力,带动整个起重机的液压系统,驱动各个液压马达,为绞车和回转马达提供动力,从而完成起重机的各个起吊和回转动作。
其中,变幅绞车,完成吊臂的上下摆动;回转马达,则完成起重机的回转;通过两者的动作,改变起吊重物的位置;主、副绞车的收放钢丝绳,完成起吊重物的高度控制。
1.2 恒张力系统工作原理
本文阐述的恒张力系统,属于起重机液压系统的一部分,与副绞车联接,构成恒张力绞车。其研究的是一种被动波浪补偿系统,这种工作模式主要用于“面操作”,即在海上两条船之间,或固定平台和供应船之间,或船舶和海面之间,或船舶和海床之间吊运货物,当货物到达支持面后(下放货物)或离开支持面前(起吊货物)使用。
恒张力系统的工作原理是:工作时,操作人员发出起升或下放指令,通过副绞车马达的转动,重物将被吊起或释放至补给船甲板。跟随时,副绞车马达带动卷筒始终向着收绳方向转动,实现快速收绳,达到张紧状态。通过恒张力液压系统的控制,当重物由波峰跌入波谷时,由船只带动卷筒反向放绳;当重物由波谷升向波峰时,钢丝绳即被张紧。
2 恒张力系统的设计与仿真
本文所设计的具有恒张力系统的船用起重机,船厂已经给定的所在海域的海况,数据显示最高海浪为4 m,并按照船厂的要求进行设计。因此,本文所研究的起重机恒张力系统,不需要再加随动吊钩系统采集数据。只需在船用起重机的副绞车,增加恒张力系统,即其副钩在起吊重物时,具有波浪补偿的性能。
2.1 恒张力液压系统
本液压系统主要有:液压电机1、比例溢流阀2、梭阀3、节流阀4、换向电磁球阀5 以及控制单元等组成。
绞车恒张力系统液压原理图如图2所示。
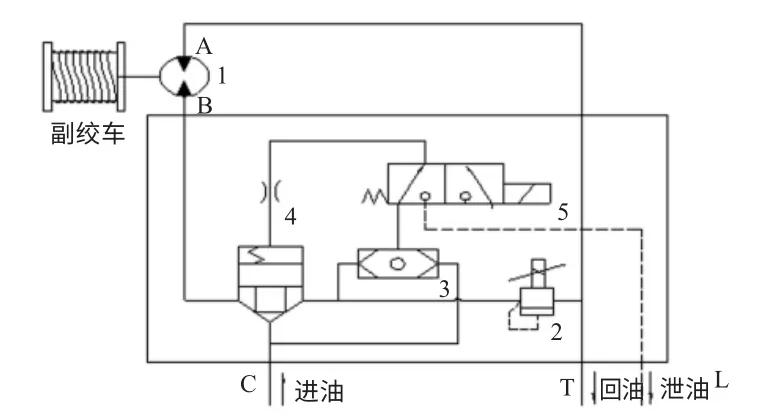
图2 绞车恒张力系统液压原理图
根据吊钩的起吊能力等,确定比例溢流阀2、梭阀3 两端的压差。当正常起吊货物时,电磁阀5 不得电,泄油管路是断开的,液压油由液压电机的B 口进,A 口出,控制绞车收放钢丝绳起吊货物;当跟随时,电磁阀5 得电,L 油路导通,根据起吊货物的总质量,A、B 口存在一定的压差,液压油除了要给液压电机供油,维持钢丝绳张紧力矩外,多余的油将通过L口管路回到油箱。
当货物由波峰到达波谷时,补给船拖动钢丝绳使得绞车旋转释放钢丝绳;当货物由波谷到达波峰的过程中,液压电机旋转收紧钢丝绳;当到达波峰的瞬间,钢丝绳张紧,绞车电机工作,将货物吊离补给船,此时恒张力系统工作完毕。
其中,比例溢流阀2 控制A、B 口两端的压力差,保证绞车的正反转,同时起到保护该部分油路的作用;梭阀3 保证梭阀两端高油压从中间油口通过,进而控制油路的压力;电磁换向球阀5 通过给定电信号,来开启恒张力系统功能。
总之,起重机从补给船上吊取货物,并将货物吊离或放到另一船上。在这个过程中,无实时的测距装置,在波浪跟随时,副绞车马达始终输出一个与重力无关、与重力方向相反的快速张紧力矩。通过对给定溢流阀的溢流压力,设定恒张力绞车的张力,使得钢丝绳始终保持一定的张紧状态,保证恒张力绞车的电机吊着重物,随波浪一起做正向或反向的旋转运动,从而保证了在重物的起吊、释放过程中的相对平稳性。
2.2 恒张力系统的仿真
被动式波浪补偿控制系统在海上作业时,海浪的运动形式为正弦波形式,故在系统仿真时,选取正弦波信号即可。
(1)恒张力系统仿真的条件。一是根据船东提供的海况,海浪浪高为4 m,波浪周期为12 s;二是设定货物距离补给船4 m,启动恒张力系统;三是重物跟随速度设定为10 m/min。
恒张力系统仿真界面如图3所示。

图3 恒张力系统仿真界面
在波浪模拟模块中,根据仿真条件设定波浪情况;在波浪跟随模块中,通过操纵杆使重物缓缓下降至与补给船距离差为4 m,同时通过操作室中手柄,或者通过触摸屏,设定重物跟随速度;左侧为仿真模块,显示在给定的条件下,重物随着时间的推移与补给船之间的距离,及跟随的时间检测。
(2)恒张力系统仿真过程与结束。当点击波浪模拟模块START,系统进行波浪检测,所检测到的波浪为正弦波,浪高为4 m,周期为12 s;当控制操作杆使重物与补给船距离为4 m 时,启动波浪跟随模块,重物将按设定好的速度跟随波浪运动,跟随距离差逐渐变小,直至重物与补给船接触,仿真停止。
恒张力系统仿真的过程与结束如图4,图5所示。
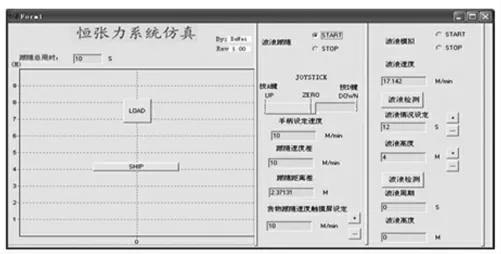
图4 恒张力系统仿真某时刻过程

图5 恒张力系统仿真结束时刻
(3)仿真界面结果分析。由图4、图5结果显示,随着时间的推移,跟随的距离差逐渐变小,当重物与补给船接触时即着陆,波浪跟随结束,总时间为24.2 s。
正弦波结果输出如图6所示。
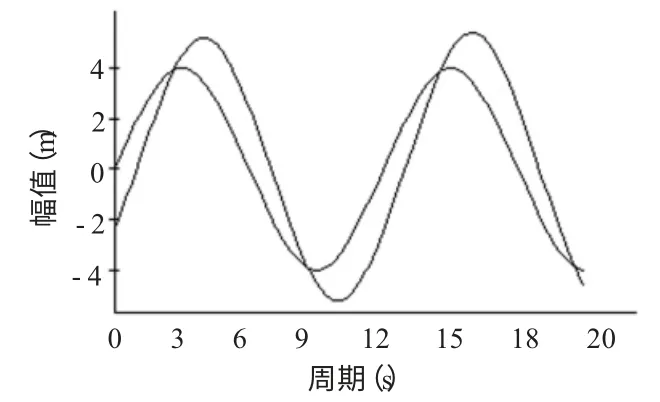
图6 系统正弦波仿真结果
仿真结果显示,海浪的周期为12 s,幅值为4 m。该系统对正弦波的响应与正弦波基本保持一致;基本达到了恒张力波浪补偿控制系统的响应要求。
3 结束语
本文针对船用起重机的工作状况,以及起重机的特殊要求,对其绞车进行了功能上的改进。通过恒张力液压系统的设计,满足其海浪跟随的功能;并通过模拟仿真界面,验证了系统的可行性;最终通过工厂的现场试验,证明了该系统的设计是成功的,满足了船东的要求。通过本文的理论探讨,希望能为今后恒张力系统的设计提供理论借鉴与参考。
[1]鄢华林,姜飞龙.海洋平台吊机波浪补偿系统研究[J].液压与气动,2011,(2):22-25.
[2]邵曼华,寇 雄,赵鹏程.几种船用起重机波浪补偿装置[J].机械工程师,2004,(4):14-16.
[3]平建涛,李海明,宋立忠.船用起重机波浪补偿控制技术研究[J].计算技术与自动化,2009,28(4):42-44.
