一种高精度的步进电机控制系统设计实现
2012-12-17河南中光学集团研发中心吕瑞云
河南中光学集团研发中心 周 磊 吕瑞云
1.引言
由于超大规模集成电路技术的迅速发展,DSP(数字信号处理器)技术在电机控制领域得到广泛应用。TMS320F2812系列的DSP芯片具有高速的数字信号能力和专为电机控制而设计的结构,使得高实时性要求和复杂算法在电机控制中实现成为可能。系统通过一种模糊控制方法实现高精度的定位,采用两重补偿反馈和开环控制相结合提供较高的运行效果,失步检测功能可以进行补偿和反馈故障信息,同时提供较高的故障适用性,可获得近似于伺服电机的性能,具有较高的性价比。
2.控制系统组成
本控制系统由控制器,步进电机驱动器,步进电机、传动机构、负载、和光电码盘等组成,系统基本组成图见图1。控制器送给驱动器一定频率和个数的脉冲,驱动器接收脉冲信息和方向信号,码盘反馈位置信息给控制器,步进电机为直流五相步进电机,传动机构为蜗轮蜗杆。
系统中采用步进电机作为驱动元件,由于步进电机属于数字脉冲驱动型,一个脉冲走一步,通过脉冲的个数可以确定其位置,通过脉冲的频率可以控制转速。但如果控制做的不好,容易导致失步甚至堵转,例如当转台的速度跟不上脉冲的频率时,就会失步。当开环系统发生失步时,控制器并不知道系统已失步,此时如果有位置反馈及时纠错,同时修正系统的加减速控制,就可以使系统继续正常的工作,这样提高系统的精度,同时也避免了堵转现象的发生。
3.系统硬件设计
本控制系统中主要硬件:
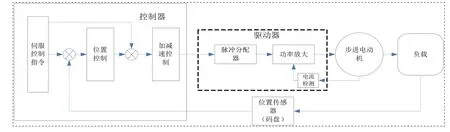
图1 系统基本组成图
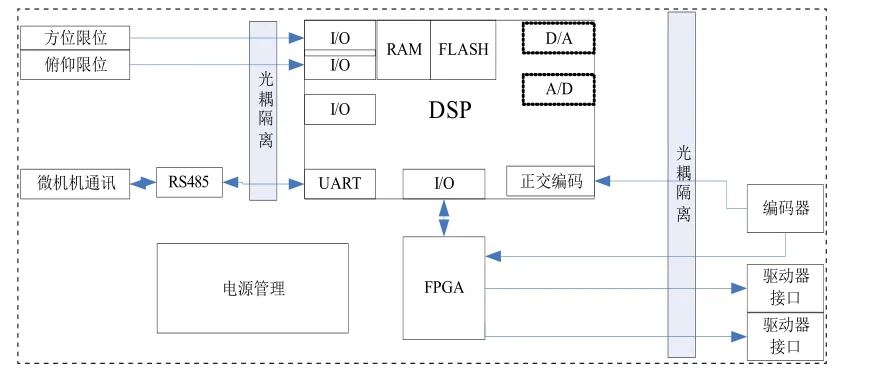
图2 控制器原理框图
方位步进电机:五相混合式步进电机,基本步距角0.72度,选配驱动器最大细分256,本系统选用10倍细分,驱动电压选24v;
俯仰步进电机:五相混合式步进电机,基本步距角0.72度,选配驱动器最大细分256,本系统选用10倍细分,驱动电压选24v;
中心处理器选:TI公司的TMS320F2812;
位置传感器选用3600线增量式光电编码器;
限位开关选用光电限位开关,俯仰和高低各两个。
控制器用于完成微机伺服命令解释,在位置反馈下实现步进电机的精确控制,主要包括:微机通讯接口、码盘接口、码盘信号处理、驱动电机接口、TMS320F2812、电源等,其中控制主板接口全部采用光电隔离措施,控制器原理框图见图2所示。
其中,DSP作为核心处理器实现各种外围功能和核心算法,FPGA配合DSP实现加减速控制,输出脉冲信号给驱动器。编码器的正交信号可以直接送给DSP的码盘接口由DSP计数,也可送给FPGA进行计数,然后由DSP取,进而减轻DSP的负担,本系统的编码器线数为3600线,4倍频后是14400,小于DSP内部编码器期寄存器的计数范围,所以本系统直接采用DSP自带编码器器接口实现码盘位置信息的采集。
4.关键技术设计实现
本控制系统为了达到较高的定位精度,还有具有较高的适用性,经济性和可靠性,在软件方面做了如下关键技术设计研究。
4.1 速度曲线
速度曲线,包含升速曲线和降速曲线,可以采取直线升速,但影响的快速性。比较来说,指数曲线是理想的速度曲线,与电机的电磁转速转矩特性相适应。指数速度曲线见图3。
假设曲线分100段,最高速为15000P/s,以伺服系统的步距角为单位。
指数曲线:EXP(-n/50)
升速曲线:R=15000*(1-EXP(-n/50))
降速曲线:R=15000*EXP(-n/50)
经过理论和试验分析,升速曲线性能可以,但降速曲线在高速时的降速加速度较大,而电机在高速时的力矩输入较小,此时速度较高时容易出现失步的现象,所以把降速曲线设计为升速曲线的逆转过程,经过试验证明效果很好。另外因从静止升速时指数曲线的的加速度较大,可以增加在低速阶段的运行时间以防止失步,同时也减小了停止时的过冲作用。
4.2 空回补偿实现
伺服传动机构采用涡轮涡杆,变速比60,具有自锁定功能,并可以大大提高电机的输出转矩,但涡轮涡杆机构的固有缺点,具有齿间隙,严重影响系统的定位精度。为消除次间隙,系统配用3600线码盘,进行位置反馈。
空回产生原理说明:效果可以参考下图,当涡轮逆时针转动时,涡轮蜗杆的咬合效果如图,其中吃力面接触,但另一面具有明显的间隙,但要反转时,首先要转动一个角度克服间隙,然后才能带动蜗轮转动。

图3 指数速度曲线

图4 过冲振荡处理程序流程

图5 二轴运动控制系统组成
空回补偿可以在运行整过程或运行开始进行或在运行结束时进行。原理是根据目标位置abc_c_dest(在运行开始时已经计算好的)与当前位置abc_c(需要根据码盘返回值实时校正的)的差值在PWM中断中实时更新Pcount,(将要运行的脉冲步数),如果不用空回补偿则此式只计算一次。
PIY.p_count=| PIY.abc_c_dest-PIY.abc_c|
下面就这三种方法进行分析:
1)运行整过程
在一个运行指令的启动到停止实时计算校正abc_c和Pcount。在低速时,小于30°/s时,没有明显问题,转台停止时仍在可接受的低速停止,没有突然停止的感觉。但高于30°/S时,就有突然停止的感觉(停止的速度仍然较高),且速度越高现象越明显。而这种现象在摇杆模式和内部的定位控制(预置位、扫描、搜索模式)相比,也不同,其中摇杆模式时的现象更明显(内部停止处理不同),定位控制时不明显。所以,目前程序的处理在内部定位控制时,采用全程实时计算,但摇杆模式和自动跟踪模式时,不进行补偿。
2)开始阶段
全程校正abc_c,当在只降速之前进行实时计算Pcount时,转台慢速停止,停止后反向运行,现象非常明显。说明在减速段已经过冲了,只是此时不根据码盘校正的abc_c计算Pcount,所以就慢速停止。后由于过冲和振荡补偿,转台再次方向运行到目标位置处。
3)结束阶段
全程校正abc_c,当在只降速之后进行实时计算Pcount时,转台在较高速度处停止。此时,Pcount是一个很大的负数,说明Pcount是突然变为一个较大负数的。
在建筑装饰装修当中,常用的清洁能源主要有地热能源、太阳能与风能等。地球表面空气流动速率的不断加快,产生动能,最终形成了风能,合理应用风能,对生态环境不会产生任何污染。太阳能资源是现阶段全球应用最广泛的自然能源之一,能够实现免费应用,不必进行运输,应用价值特别高。在建筑室内装饰装修设计过程当中,设计人员还要科学应用地热能源,减少生态污染的产生。
经过以上分析,针对各种模式都采用码盘反馈补偿空回的方案,采用了在降速的最后1/3段,实时校正计算abc_c,全程通过目标位置和但前abc_c计算Pcount,的处理方式,经过试验,在高速和低速时效果都不错。
4.3 过冲振荡处理
转台因为惯性的存在,在停止时,会出现振荡和过冲现象。为提高系统回归和预置位精度,在一次运行停止后等待100ms,等振荡或过冲结束后系统最终静止后,再次根据码盘反馈数据和目标位置比较,如果大于一定数值则启动新的运行指令继续运行直到达到精度要求,此时一个“子运行”过程结束,才处理下一个运行指令。过冲振荡处理程序流程图见图4。
4.4 速度反馈处理
对于步进电机系统,在没有失步和堵转的情况下,可以不采用速度反馈。而这些要求在实际中往往难以保证。为提高系统的适应性,抗干扰性,防止在失步或堵转时出现的啸叫声音,同时使系统可以继续运转,可采用速度反馈。
速度反馈的实现有两种方案:码盘位置的差分处理和PWM中断中的同步检测。
1)码盘位置差分处理:采用定时器的定时采集位置数据,并取差,计算出速度。并与指令速度作比较,然后做相应的处理。
2)PWM中断中位置同步检测:中断一次,转台应走一步。计算中断次数和码盘的的位置差值,判断是否失步或堵转。在失步情况下,减速处理,在堵转情况下,马上停止。同时置故障标志,并上传。
4.5 失步补偿检测
1)在装配阶段,对机械传动机构进行研磨校正,尽可能减小空回,这需要失步检测。
2)在运行阶段,由于长期运转造成空回量增加引起失步,此时一方面要检测到失步并上传故障信息,同时对失步量进行检测补偿,保证系统依然能够正常运行,不影响运行效果。
3)当系统出现异常咔滞,无法转动时,系统严重失步,此时上传故障信息。具体失步检测流程如附图4所示。电机每转N步,即根据码盘反馈数值计算等效电机步数N1并判断一次,如果偏差过大,大于K,则认为电机失步,此时即根据失步程度采取降速处理,使其不至于出现脉冲速度与负载速度不匹配引起继发性失步,同时把失步次数计数器T加1,并上传失步故障,判断T值是否大于3,即是否连续3次失步,如果是既认为出现咔滞堵转,停止运行并上报故障信息,如果|N-N1|值偏差小于参量K,则认为没有失步,各标志N,N1,T清零并重新进行下一次判断。
5.具体实例应用效果
根据上述技术方案,设计二轴摄像转台步进电机控制系统,系统的所有算法都由DSP实现,一块运动控制卡实现对方位轴和俯仰轴的控制功能,实现各种运动控制模式,摇杆控制模式、预置位模式、扫描、搜索模式以及自动跟踪模式等,其中摇杆模式不需要很高的定位精度,所以采用开环控制,速度曲线采用指数加减速曲线,可以达到较高的运行效果,预置位模式需要很高的定位精度,所以采用模糊控制,加上空回补偿、停止过冲补偿以及码盘反馈,各种模式下都采用失步检测功能。系统成本低,定位精度高,适应性好,性价比高。二轴运动控制系统组成见图5。
本系统最终实现指标:
最大方位回转速度 ≥ 60°/s
最小方位回转速度 ≤ 0.1°/s
最大俯仰回转速度 ≥ 60°
最小俯仰回转速度 ≤ 0.1°/s
最大工作角加速度 ≥ 60°/s2
回归与预置位精度 ≤ 0.06°
功能上全部实现系统所要求的功能,并且控制方式更加灵活,可靠性更高。
6.结束语
本文介绍的步进电机控制系统,控制灵活性好,可以实现复杂的控制算法。本系统已广泛应用于多种视频监控系统中,实践表明,按照此方案进行的步进电机控制系统,成本低,精度高,自适应能力强,可靠性高,具有在相关领域推广的价值。
[1]苏奎峰,吕强,陈圣俭.TMS320F2812原理与开发[M].电子工业出版社,2005,4.
[2]史敬灼.步进电动机伺服控制技术[M].科学出版社,2006,7.