基于STC12C5A60S2单片机的智能机器人设计
2012-12-08梁明亮孙逸洁
梁明亮 孙逸洁
基于STC12C5A60S2单片机的智能机器人设计
梁明亮 孙逸洁
介绍一种以STC12C5A60S2单片机为控制核心的智能机器人的总体设计思路,阐述了智能机器人的硬件设计原理和C51软件设计方法。该机器人参加全国职业院校技能大赛,运行稳定可靠,为获得优异的竞赛成绩起到了重要作用。
STC12C5A60S2;智能机器人;主控制板;C51
基于单片机及嵌入式技术的轮式智能机器人集电子技术、自动控制、嵌入式技术和机电一体化技术于一体,涉及微处理器控制、传感检测、无线网络通信等多个学科和领域。机器人技术应用竞赛是2011年教育部技能大赛设定的最具观赏性和参赛队数最多的比赛项目之一,参赛队使用51系列单片机作为微处理器为控制核心的机器人平台,在此基础上设计开发参赛队使用的机器人,使机器人在比赛场地中完成比赛任务。比赛分为第一阶段初赛和第二阶段决赛两个部分,要求机器人自动完成“建筑材料”(小篮球)识别、抓取、运输和投放。
1 智能机器人的总体设计
根据机器人比赛规程,需要参赛队选择机器人类型,我们选用并自行设计3台机器人参赛,分别为1台手动机器人和2台自动机器人。
1.1 总体结构。
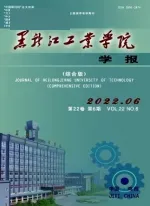
机器人总体结构如图1所示,主要由电路板(含单片机核心板、驱动板等)、主动轮、从动轮、金属框架、直流驱动电机、电池、上部机构等组成,机器人的底部安装有红外线传感器(16路),机器人金属架上用于安装建筑材料(小篮球)的存储机构和投放机构,机器人单片机核心板、驱动板等是机器人硬件电路的核心。
图1 机器人总体设计示意图
1.2 硬件电路设计。
机器人的硬件电路设计工作包括主控制板、直流电机驱动、电源驱动、巡迹传感器板、传感信号处理板、颜色识别模块、舵机、直流电机等电路的设计和制作。颜色识别电路用于对抗赛中识别桥墩内的小篮球的颜色(有红、蓝2种颜色),颜色识别模块安装在机器人运行前方位置,对抗比赛时识别桥墩内已投入的篮球是红色还是蓝色,从而确定投入的小篮球已方的还是对方的,如果经过判断分析是对方的,机器人将利用上部机构将对方的小蓝球取下,再投放己方的小蓝球。
2 硬件设计
2.1 主控制板设计。
采用STC12C5A60S2单片机作为微处理器为核心设计机器人主控制板,主控板主要电路原理如图2所示。
图2中(见下页),U1为 STC12C5A60S2单片机,STC12C5A60S2是宏晶科技生产的单时钟机器周期(1T)的单片机,指令代码完全兼容传统8051,速度比普通的8051单片机快10倍左右,其内部集成有MAX810专用复位电路,功耗低、抗干扰强,具有2路 PWM输出,8路高速10位A/D转换器,适合于电机控制及其他电磁干扰较强的应用领域。
主控制板输入信号有两类,一类是16路专用巡迹传感器信号输入,另一类超声传感器、颜色识别、光电、接近等其他传感器信号的输入。
红外巡迹传感器板有16路,安装于机器人底部,可以准确地探测到地面白色引导线及白色引导线组成的十字交叉点。红外光电传感器的基本原理是,设计红外发射电路和红外光敏接收电路,红外线在黑线和白线对光的反射系数不同,白色反射光线,黑色吸收光线,电路当检测到黑线时,检测电路向单片机发出一个高电平信号。当检测到白色时,检测电路向单片机发出一个低电平信号。巡迹输出信号发送给传感器信号处理板。P1.3、P1.4为STC12C5A60S2的两路PWM输出接口,向电机驱动板发出电机PWM脉宽调制信号和方向信号,分别控制左、右轮直流减速电机的转速。
16路巡迹信号输入到单片机的 P2口,U3、U4为74HC245,构成了总线驱动电路,使单片机P2口为复用状态,这样设计可以节省单片机I/O资源,P4.4口用于U3、U4的选择控制。当P4.4为高电平时,P2口接收的是16路传感器的高8位信号QQ8~QQ15;当P4.4为低电平时,P2口接收传感器的低8位信号QQ0~QQ7。
外接的位置传感器信号、颜色识别模块的输出信号、光电传感信号、接近传感器信号均输入到STC12C5A60S2单片机的P0口,各类传感信号通过TL521光电耦合器隔离、74HC14整形后送给单片机。光电开关用于探测机器人运行前方是否有标志物,在比赛中,其用途是探测机器人运行前方桥墩内的建筑材料(小篮球)是否装满或前方是否有障碍物。
单片机根据巡迹信号对机器人位置进行分析计算后,输出PWM脉宽调制信号给电机驱动板,电机驱动板用于驱动机器人平台上的左、右轮直流减速电机。利用PWM信号占空比的不同,来控制电机的不同转速;利用方向信号控制电机的正反转(直流24V供电),实现机器人平台的前进、后退和转弯。2台主动轮电机选用直流减速电机,主要参数:额定电压24VDC,转速150转/分,功率70W。P3口为控制输出口,通过驱动板驱动并控制机器人上部机构的舵机、对抗机构的直流电机进行相关动作。

图2 主控制板电路原理
2.2 驱动电路设计。
电机驱动电路采用专用芯片L298N作为电机驱动芯片。用该芯片作为电机驱动,稳定性好,驱动能力大,电路简单,大大地简化了驱动电路。L298N是SGS公司的产品,内部包含2个H桥的高电压大电流桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2 A以下的电机,工作温度范围在-25℃~130℃之间。机器人设计中,使用74HC245进行信号放大和缓冲,L298进行电流放大,单片机通过调节PWM信号的占空比实现对电机的调速与转向。L298的第1和15脚单独引出,接到电流采样电阻,从而形成电流传感信号,通过LM358运算放大器放大后产生ADM1、ADM2模拟电压信号,送到单片机中进行电流的测量和分析,便于更好控制电机的电流及速度。
2.3 机械部件设计。
2.3.1 设计原则。
(1)机构要巧妙,重量要尽可能轻。在机器人竞赛中,参赛机器人有总质量的限制,首先是3台参赛机器人总重不能超过50KG,另外是在规定时间内,如果投球分数相同,则总重越轻的机器人参赛队为胜出。所以在保证功能实现的前提下,结构越简单越好。
(2)在对抗赛中可能会有机器人相互间的冲撞,机器人机械部件要有必要的强度、刚度和较好的可靠性。
(3)机构材料要选择易加工的材料,还要方便赛前的简单调试和维护。
(4)充分考虑与电路控制的可控制性,降低对控制系统的严格要求。
2.3.2 行走机构的设计。
机器人移动方式通常有轮式、履带式和步行式等方式。我们采用轮式行走方式,轮式移动机构是最常用的一种移动机构,其优点为移动速度较高且较稳定,机构和控制都相对简单。
轮式行走机构包括动轮和底部平台。机器人底部平台采用铝合金型材,上部设计的投球机构安装在机器人平台的框架上,机器人底部框架要有一定的承受力。由于受比赛场地启动区域面积限制,机器人底盘框架大小约为600mm×500mm。机器人上部机构固定安装在底部平台上。动轮包括主动轮2个,从动轮1个,主动轮采用金属铝芯、橡胶外胎,用于完成向前、向后直走,向左、向右转向等技术动作。从动轮设计在运行前方,实际上为万向轮,和两只主动轮形成三角支撑着机器人的结构。从动轮无动力驱动,随着主动轮的方向改变自己的方向。主动轮、从动轮形成了三点支撑的结构,平衡性和稳定性好。
2.3.3 上部机构的设计。
上部机构主要包括存储建筑物(篮球)机绝、投球机构和抓取机构。采用串行螺旋储存的方式储存小篮球,空间利用率较高。投球机构为直落式,在舵机的控制下,篮球垂直向下,运动速度稳定,投球方式可靠。抓取机构可分为气动手爪和机械式手爪两种,气动手爪相对比较简单,但需在机器人上附载一个储气罐,重量较重,我们采用的是机械式手爪。
3 软件设计
竞赛机器人软件编程主要包括主程序、PID电机控制程序等部分,按照参赛方案编写参赛机器人程序,采用单片机Keil C51语言进行机器人的软件设计。每次比赛前应根据场地上实际情况调整策略、更改程序。
STC12C5A60S2是整个主控制器的核心,它主要负责接收各类传感信号并发出执行命令。自动机器人主程序运行后,选手按下启动按钮,机器人根据巡迹信号进行分析,控制机器人车体转弯、停止,并实现桥墩的识别、球的抓取投放等动作。主程序运行时首先要对STC单片机定时器、两路 PWM信号输出的PCA模块进行初始化。PWM即脉冲宽度调制控制,PWM信号通过L298放大后直接控制直流电机驱动两个主动轮,PWM程序段如下:
void PWM(int motor1,int motor2)
{CCON=0X00;
CMOD=0X84;
CL=0X00;
CH=0X00;
CCAPM1=0X42;//右电机PWM控制
CCAP1L=motor2;
CCAP1H=0xf0;
PCA_PWM1=0;
CCAPM0=0X42;//左电机PWM控制
CCAP0L=motor1;
CCAP0H=0xf0;
PCA_PWM0=0;
CR=1;}//启动PCA计数器
在机器人的控制程序中,STC12C5A60S2微处理器的主要任务要完成电机闭环控制,实现对机器人的位置、速度等调节,采用PID算法实现对直流电机转速的精确控制。单片机将电机编码器发送来的反馈值与输出的PWM指令值进行比较,再按PID算法计算电机下一步的位置速度,较好地解决了运动过程中的位置偏差问题。
4 结束语
通过对手动机器人和自动机器人的测试,机器人运行稳定,能实现工件的自动识别、抓取、运输。在本次全国竞赛的决赛中,作者所指导参赛队机器人运行稳定,反应迅速,自动机器人3次将对方已经投入的建筑材料(小蓝球)从桥墩取下,决赛对抗中获得了全国一等奖的好成绩,验证了所设计的智能机器人软、硬件设计的可行性。
[1]2011年全国职业院校技能大赛大赛组委会.高职组机器人技术应用竞赛指南[Z].2011:1-16.
[2]FIERRO R,L EWIS F L,“Control of nonholonomic mobile robot using neural networks,”IEEE Transactions on Neural Networks,vol.9,pp.589-600,1998.
[3]董宗祥,石红瑞,杨杰.嵌入式智能小车测控系统的设计与实现[J].计算机测量与控制,2010(2):357-362.
Design of the Intelligent Robot Based on the STC12C5A60S2 MCU
Liang Mingliang Sun Yijie
The paper explains the general design of an I telligent robot that the key part of the control system is based on Type STC12C5A60S2Single Chip Micyoco and the design principle and methods of the type of robot.It is the higher liability of the robot that it won the technical skill competition for higher vocational colleges all over China.The robot has contribute a lot to the excellent competition result.
STC12C5A60S2;intelligent robot;main control board;C51
TP24
A
1672-6758(2012)05-0041-2
梁明亮,硕士,讲师,郑州铁路职业技术学院,河南·郑州。研究方向:单片机及机器人技术。邮政编码:450052
孙逸洁,硕士,郑州铁路职业技术学院,河南·郑州。研究方向:单片机应用技术。邮政编码:450052
河南省教育厅科技攻关资助项目(2011C510003)
Class No.:TP24Document Mark:A
(责任编辑:郑英玲)