国外月球探测有效载荷进展状况
2012-12-04杨生胜薛玉雄把得东曹洲
安 恒,杨生胜,薛玉雄,石 红,把得东,曹洲
(兰州空间技术物理研究所真空低温技术与物理重点实验室,甘肃兰州730000)
1 引言
在19世纪50年代末,美、苏等国开始对月球进行探测,二战后,月球探测进入相对低潮期。而进入20世纪90年代,月球探测活动开始复苏,特别是美国前总统布什于1989年提出了“重返月球”的设想,美国重启月球探测研究,分别于1994年和1997年发射了“克莱门汀”探测器与“月球勘探者”探测器。进入21世纪,月球探测更加频繁,进行月球探测发射活动的国家由美、苏两国扩展到了中国、日本、欧洲、印度等国。
美国在上世纪月球探测成功的基础上于2004年宣布了“新太空计划”,该计划中包括了较为完整的重返月球计划。欧洲于上世纪末启动了月球探测计划,2003年发射了“智慧-1号”月球探测器,成功进行了月球探测。日本于上世纪90年代开始陆续实施月球探测活动,2007年成功发射“月亮女神”探测器进行了月球探测。印度于本世纪初启动了月球探测计划,2008年成功发射“月船1号”探测器,成功进行了月球探测。我国探月工程于2004年正式启动,于2007年发射了“嫦娥一号”探月卫星,成功进行了月球探测。截止至2011年5月,人类共发射了221颗月球探测器,占到了深空探测器总数的约70%。历次月球探测都搭载了多种有效载荷,以对月球空间环境、月球元素、地形地貌等进行探测。
2 国外月球探测有效载荷发展状况
2.1 美国
美国从阿波罗计划开始,已成功发射了多颗月球探测器,尤其是20世纪90年代提出“重返月球”计划后,更是发射了多颗月球探测器,此时的月球探测主要以环境探测为主,如1994年和1997年发射了“克莱门汀”探测器与“月球勘探者”(Lunar Prospector)探测器。于1998年1月7日成功发射Lunar Prospector探测器如图1所示,探测器飞行在圆形极轨道,轨道高度100km,每13.7天即可覆盖月球全表面[1]。探测器外形结构如图 2 所示[2]。
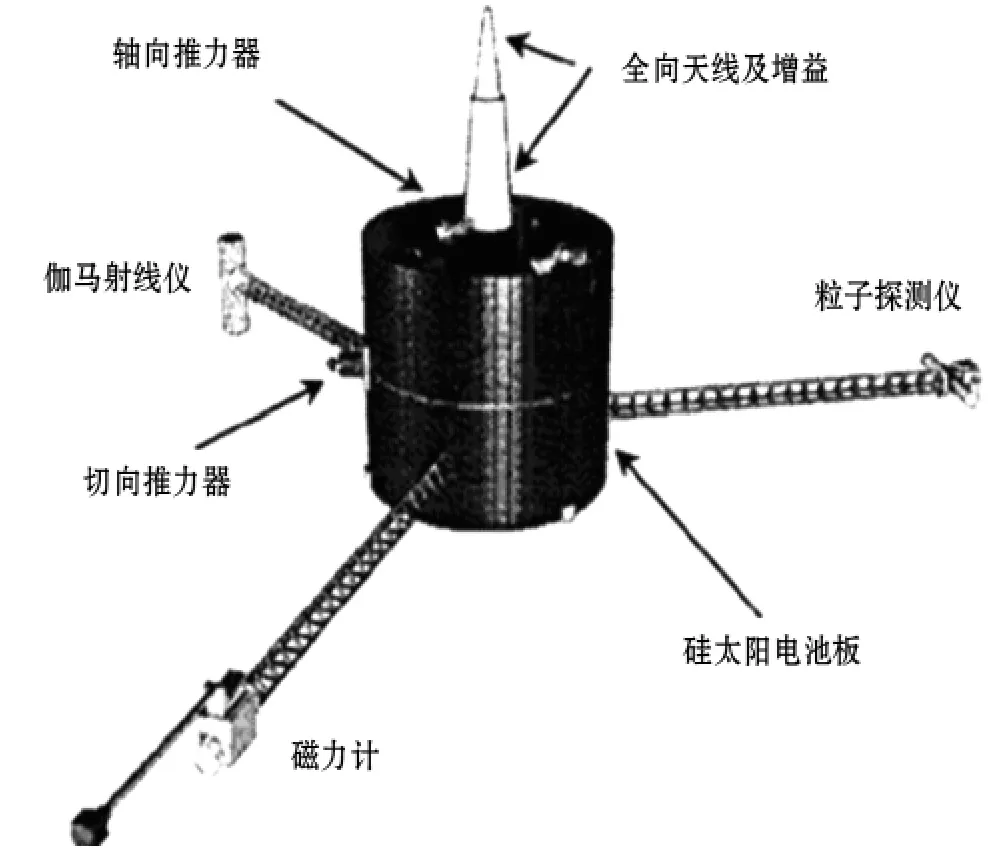
图1 Lunar Prospector外形示意图和载荷配置

图2 LRO探测器外形结构图
探测器搭载了5个有效载荷(如下表1所列),主要用于探测近月轨道的辐射环境。
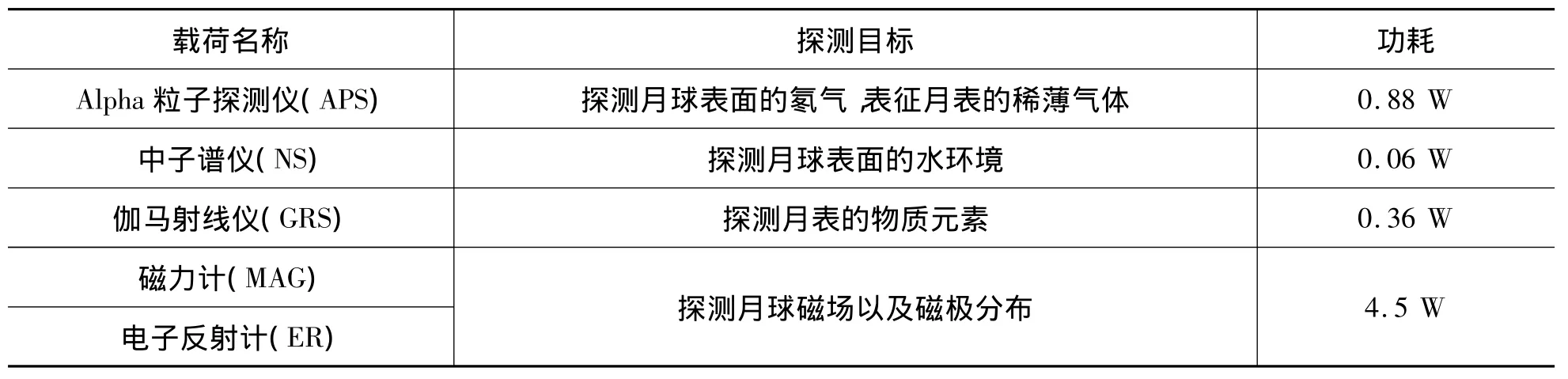
表1 LP探测器配制的环境载荷
进入21世纪,美国在之前月球探测成果的基础上于2004年宣布了“新太空计划”,该计划包括了较为完整的重返月球项目,将分阶段发射多颗月球探测器,2009年6月18日成功发射的LRO探测器就是该计划中的一个,其载荷配制如下表2所列。
2011年9月10日,美国发射了“月球重力场反演与内部实验室”(GRAIL)探测器[3]。GRAIL由A、B双星组成。通过相互间的精确测距来反演月球重力场。由于该任务采用了小能量转移轨道,因此,地月转移需要3~4个月的时间。“GRAIL”的效果图与实物如图3所示。
GRAIL探测器共配制了两类载荷:
(1)月球重力测距系统(LGRS)
LGRS主要用于精确测量GRAIL-A与GRAIL-B之间的距离变化情况,测量精度在微米量级,是本次任务的主载荷。LGRS需要A、B双星之间配合工作,因此两颗GRAIL卫星上均需配置相同的LGRS载荷[4]。LGRS的原理框图如图4所示:
(2)小型月球成像系统(MoonKAM)
除了月球重力场测量与反演的主任务外,GRAIL还配制了一套数字成像系统,主要用于月表图形成像。MoonKAM系统有四个摄像头,拍摄不同方向的月球影像,包括一个窄视场镜头(视场角5.4°)和三个宽视场镜头(视场角44°)。

表2 LRO的载荷配制及性能指标
综上所述,从美国月球探测器搭载的有效载荷发展状况可以看出,早期的月球探测以科学探测为主,主要用于科学研究且载荷功能单一,后期的月球探测,除了科学探测以外,还对月球辐射环境以及相应的辐射效应进行了探测,并且单个探测器搭载的载荷数量也相对增多,载荷的功能也越来越复杂,逐步向综合化、多功能化趋势发展。
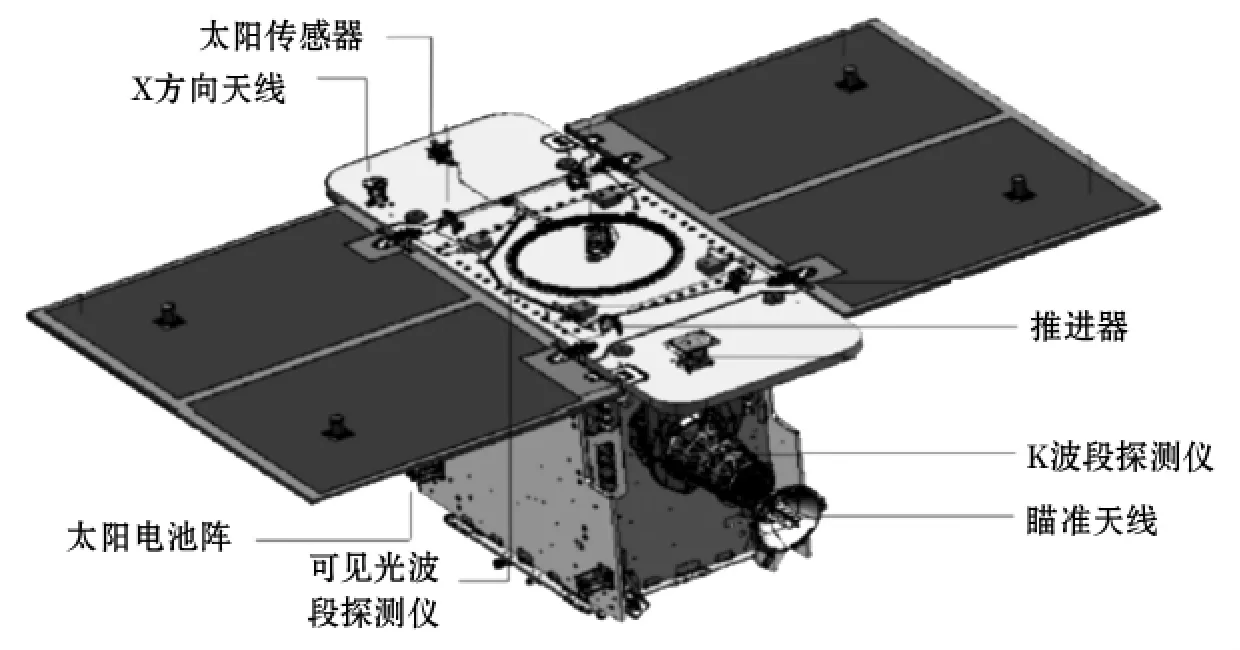
图3 GRAIL探测器的效果图

图4 LGRS载荷的原理框图
2.2 日本
日本自上世纪90年代开展月球探测活动,迄今已成功发射了多颗探测器。如1990年1月,日本发射了首个月球探测器 HITEN。如图5所示。

图5 HITEN探测器实物图
日本首颗月球探测器,HITEN以技术试验为主,唯一的科学目标为地月环境的尘埃测量与研究。携带的唯一一台有效载荷为西德尘埃计数器(MDC),用来记录撞向探测器的尘埃颗粒的重量、速度和方向,获取地月转移过程以及环月轨道附近的空间尘埃环境数据。
2007年9月14日,日本发射了“月亮女神”月球卫星[5]。“月亮女神”号由主环绕器和两枚子卫星组成,日本航天界称为“继Apollo工程之后最大规模的月球探测任务”。“月亮女神”的外形效果图与实物如图6所示。
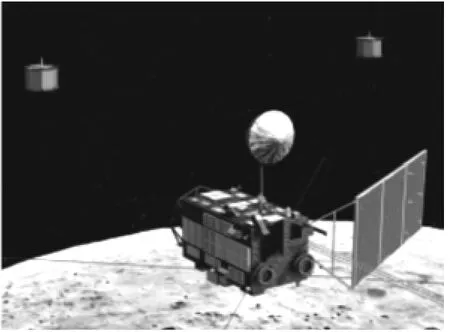
图6 “月亮女神”探测器图
“月亮女神”号探测器主要是为了探索月球和地球的起源,研究月球的形成和演化过程;观测月球地表与空间环境;同时精确测量月球重力场。为此,搭载的有效载荷主要有多波段成像仪、地形测绘相机、测月雷达、月球磁强计、高清电视摄像机等[6],如表3所列。

表3 “月亮女神”载荷配制
2.3 欧空局
近年来欧空局的典型月球探测器是2003年9月27日成功发射升空的SMART-1探测器。SMART-1是欧洲的首颗月球探测器,也是人类第一个采用霍尔电推进系统月球探测器。如图7所示。

科学目标 有效载荷 科学任务探测月球表层和次表层结构地形测绘相机 获取月球表面高分辨地形数据测月雷达 利用高功率雷达脉冲,探测表面至数千米深度的月壳分层结构和构造特征激光高度计 利用高功率激光脉冲,精确测定月面地形高程,建立月球数字高程模型研究地球等离子体的行为结构带电粒子谱仪 测量月球轨道处宇宙射线粒子的丰度,以及氡(Rn)、钋(Po)等放射性元素月球磁强计 测量月球及其附近由岩石剩余磁性形成的微弱磁场,反演月球剩余磁场衰变产生的阿尔法射线探测月球环境上层大气和等离子体成像仪 在月球轨道处对地球磁层和电离层进行成像,探测月球电离层探测月球重力场分布等离子体分析仪 测量月球轨道上低能电子的三维空间分布和低能离子的质量分布无线电掩星观测 测量VLBI射电源子探测器(V星)发出的无线电频率信号的相位偏差,开展掩星观测,空间四路多普勒测量 精确测定主探测器的轨道扰动,反演月球重力场高清晰电视画面 高清电视摄像机 拍摄月球和地球的电视画面,反演月球背面局部地区的重力场差分VLBI射电源 测定中继子探测器(R星)和V星的轨道,特别是地球从月球地平线上升起的画面
探测器主要用于对月球表面进行X射线和红外线遥感采样绘制地图,从不同的角度拍摄插图并建立月球表面地图的三维模型;同时探测月球的化学成分组成,使用红外线搜寻月球南极固态水的存在。因此,SMART-1共配置了7类载荷,具体如表4所列。
SMART-1在轨飞行中,成功获得了一些科学成果,如X射线谱仪获得了高分辨率元素分布图;对月球远地面进行了首次光谱探测;在Mare Crisium地区探测到钙元素;获得了月球南极光照较差地区的环形山光学图像。

图7 SMART-1探测器图
2.4 印度
2008年10月22日,印度的首颗月球探测器“月船1号”在斯利哈里柯塔岛发射。“月船1号”是印度的第一次月球探测。探测器包括一个月球环绕器和一个硬着陆器,如图8所示。“月船1号”于2008年11月14日成功释放硬着陆器,着陆于月球南极附近[8]。
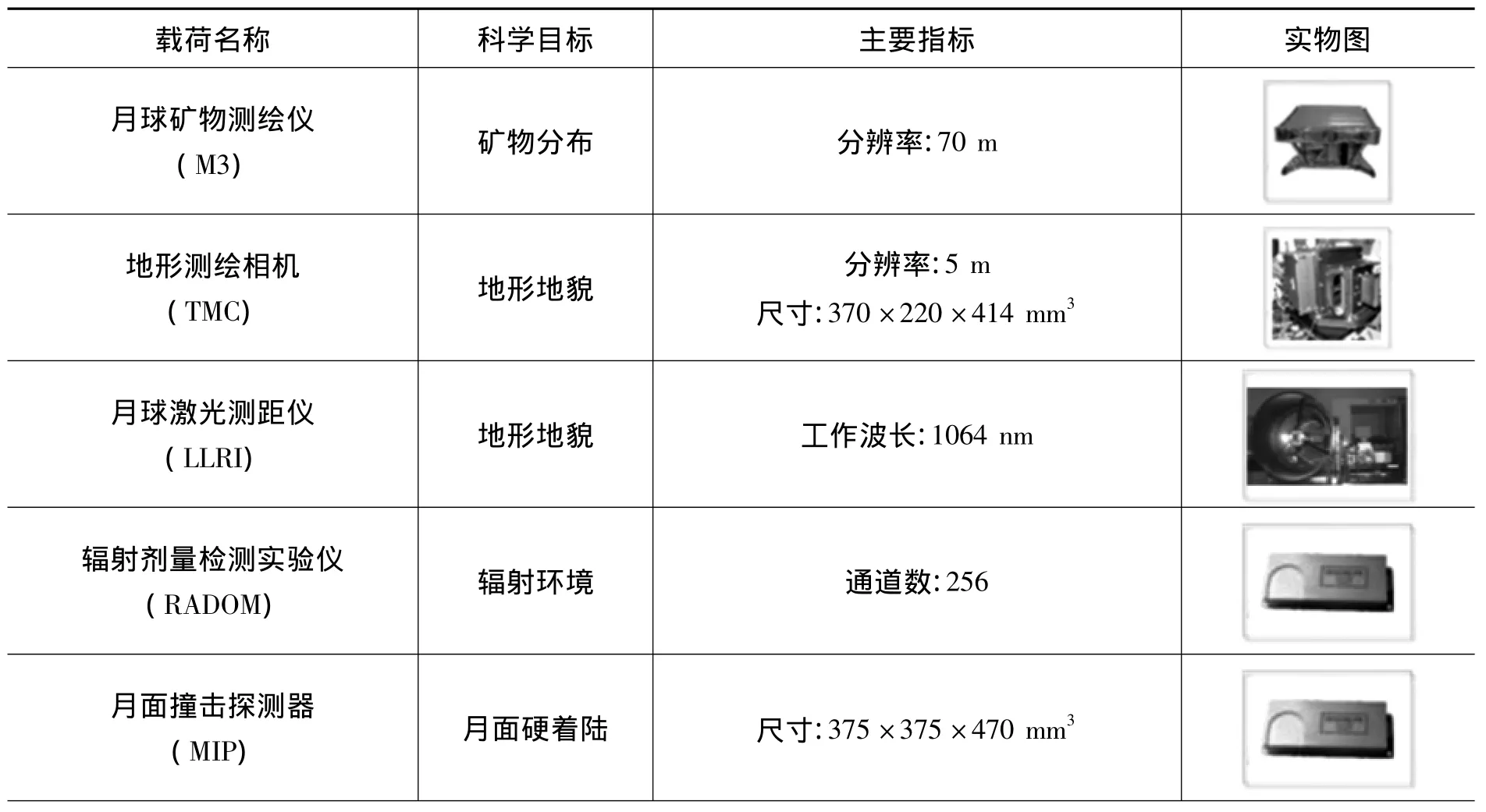
“月船1号”主要是用于生成月球正面和背面的三维图像(空间和高度分辨率为5~10 m),对全月面进行化学和矿物学测绘,约25 km的空间分辨率获取镁、铝、硅、钙、铁和钦等元素的分布资料,约20 km的空间分辨率获取氛、铀和牡等大原子序数元素的分布情况,以推断月球的早期演化史。因此,“月船1号”探测器共携带11台有效载荷[9],其主要科学目标和相应有效载荷见表5所列。

图8 “月船1号”探测器图
3 月球探测有效载荷配制建议
随着月球探测技术的发展,一些新技术、新型电子器件在探测器上的应用范围越来越广,导致有效载荷的性能越来越高,功能越来越多样化。通过分析以上国外月球探测载荷配制的分析,建议月球探测载荷配制考虑以下几个方面:
(1)加强对月球环境的探测,尽量减小空间环境对探测器的影响
要加强月球辐射环境引起的充放电效应、单粒子效应的研究,着重考虑辐射敏感器件的抗辐射优化设计,提高抗辐射能力。
(2)加强探测器异常预警能力
通过实时监测大范围的高能太阳质子事件,及时发出预警信息,指导探测器的在轨管理和故障处理,尽可能最大程度的减小太阳质子事件对探测器的辐射损伤。
(3)加强集成化载荷的研制
随着电子器件集成度的不断提高,研制小型化、多功能的载荷,实现辐射环境与效应的综合监测,提高工程应用能力。
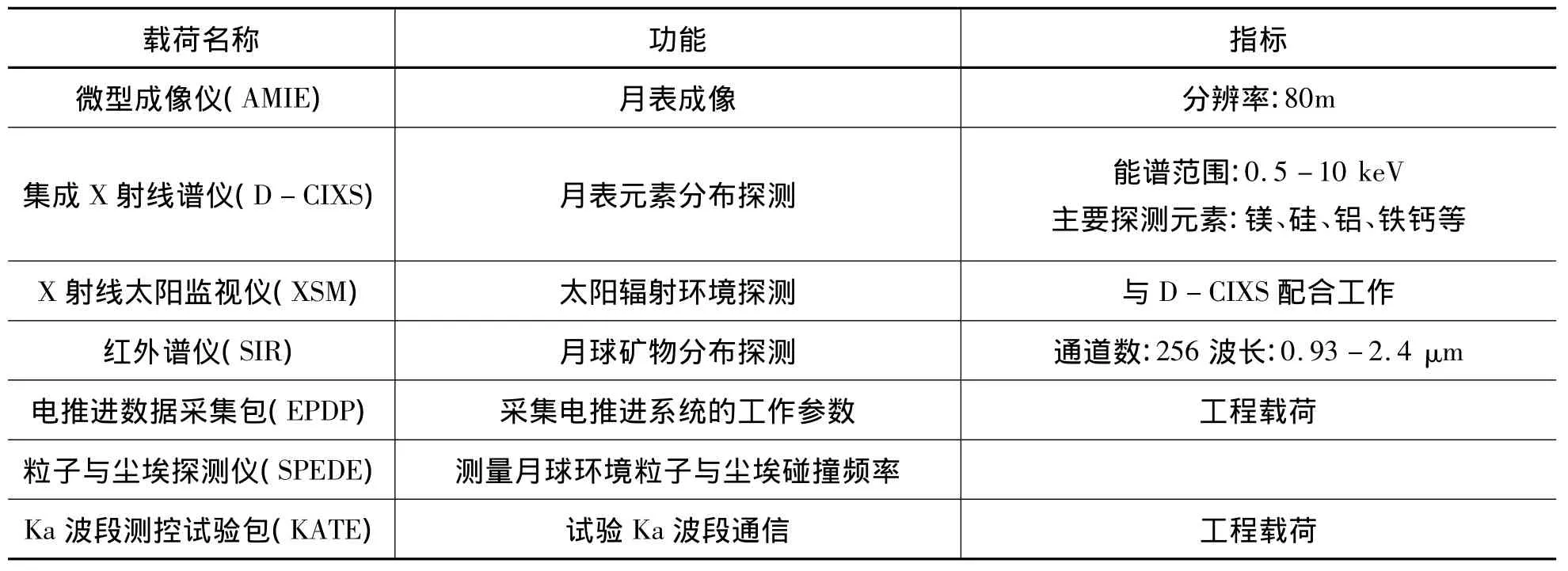
表4 SMART-1载荷配制
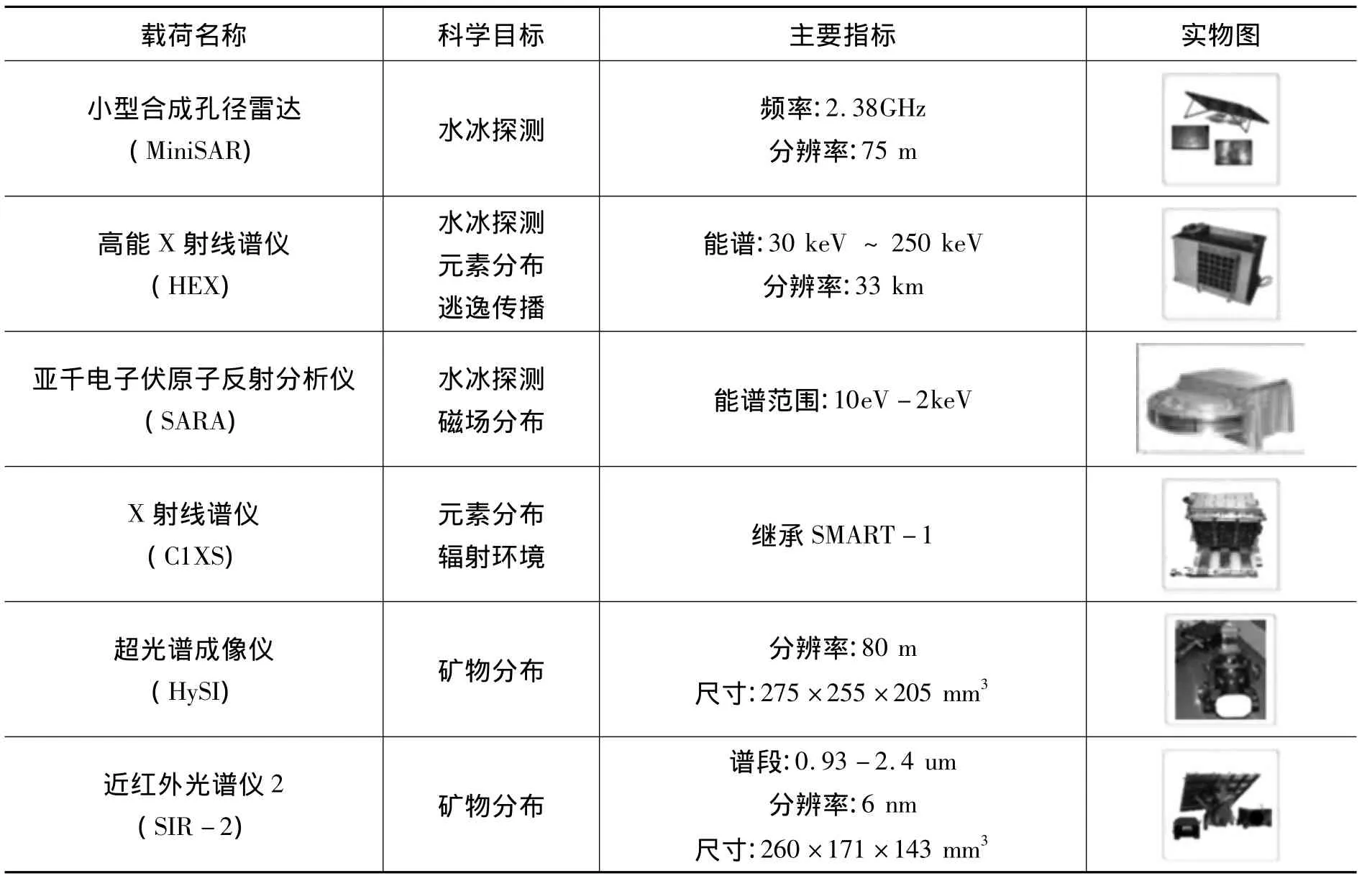
表5 “月船1号”载荷配制
?
4 结语
从国外月球探测中看出,早期的月球探测以探测月球环境科学为目的,而后期月球探测器的载荷配制越来越全面,尤其是近些年来,国外的月球探测器对辐射效应进行了相应的探测研究,研制了一些辐射效应监测器,与辐射环境监测器配合,进一步全面了解月球辐射环境的危害性,为月球探测器的设计提供技术支撑。同时,探测器配制的载荷呈现出小型化、多功能化、模块化的发展趋势。
[1]Francisco J.Andolz.LUNAR PROSPECTOR MISSION HANDBOOK[M].Ames Research Center.April 10,1998.
[2]Richard Vondrak ,John Keller,Gordon Chin.Lunar Reconnaissance Orbiter(LRO):Observations for Lunar Exploration and Science[J].Space Sci Rev.2010(150):7 ~22.
[3]NASA's Exploration Systems Architecture Study,Final Report,NASA-tm-2005-214062.
[4]The Robotic Lunar Exploration Program(RLEP)-An Introduction to the Goals[J].Approach,and Architecture,AIAA.2005 ~2548.
[5]Kato M,sasaki s,Tanaka K,et al.The Japanese luIlar mission SELENE:Science goals and present status[J].Advances in Space Research.2008(42):294 ~300.
[6]郑永春,邹永廖,付晓辉.月亮女神探月计划的有效载荷与科学探测综述[J].航天器工程.2011(3):108~119.
[7]Bernard Foing.Smart-1 Instrument Technology[J].Planetary Science & Exploration.2003(12):118 ~126.
[8]Goswami J.N.,Annadurai M.Chandrayaan-1:India's First Planetary Science Mission To The Moon[J].Curr.Sci.96(4):486~491.
[9]Goswami J.N,Thyagarajan K,Annadurai M.Chandrayaan-1:Indian Mission To Moon[J].Lunar and Planetary Science .2006:1567~1577.