自适应网格交互多模型不敏粒子滤波算法
2012-12-02许江湖
许江湖,刘 忠,党 玲
(1.海军工程大学 电子工程学院,湖北 武汉430033;2.海军大连舰艇学院,辽宁 大连116018)
0 引 言
多模型(MM)算法是机动目标跟踪算法中一个很受欢迎的方法。其主要思想是:设计一系列的模型来代表可能的系统行为方式或结构(称为系统模式),基于每个模型的滤波器并行地工作,系统的整体估计则是各模型滤波器所做估计的数据融合。大多数现存的MM 估计算法,包括交互多模型(IMM)算法,在所有的时刻均使用预先确定的固定模型集合,在这个意义上是具有固定结构(FS)的。固定结构多模型(FSMM)算法存在的缺陷是[1]:为了覆盖现实环境中的大范围的可能的机动,算法所选的模型集合应该尽可能大。然而,增加模型的数量不但会引起计算量的增加,而且由于在当前时刻所使用的模型之间存在不一致会引起模型之间不必要的竞争,因此未必能保证跟踪性能的提高。变结构多模型(VSMM)算法是近年来发展起来的最有效的机动目标跟踪滤波算法,该算法能克服FSMM 算法的缺陷,且具有较高的费效比(即算法达到的性能和花费的计算量之比)。因此该算法从提出到目前,其在机动目标跟踪应用方面一直倍受关注。然而,目前的MM 算法包括VSMM,各模型滤波算法通常采用卡尔曼滤波或者扩展卡尔曼滤波算法,对非线性、非高斯系统模型,其滤波性能将大大降低。
近年来,粒子滤波(PF)被应用于目标跟踪,以解决其中的非线性、非高斯问题[2]。考虑到MM 算法和PF 算法二者之间的互补性,文献[3-5]将IMM 与PF 相结合,提出了交互多模型粒子滤波算法(IMMPF)。IMMPF 由于既能跟踪目标的机动,又不受非线性、非高斯的限制,因此该算法一经提出,国内外学者对其进行了相当多的研究和改进[6-8]。
由于上述文献对IMMPF 的改进都没有涉及到IMM 算法,也就是这些算法在多模型这个意义上都是具有固定结构的,因此,FSMM 算法存在的缺陷,这些算法都不可避免地存在。另外,由于标准粒子滤波算法是用系统状态的转移概率作为重要性密度函数,没有利用最新量测信息,使得产生的粒子样本经常集中在后验概率分布的尾部,从而导致粒子选择的盲目性,降低了滤波精度。为此,本文将一种变结构多模型算法——自适应网格交互多模型(AGIMM)算法和UPF 算法相结合,提出了自适应网格交互多模型不敏粒子滤波算法(AGIMMUPF)。该算法通过自适应网格实现了模型自适应,从而以较小的模型集合覆盖了目标大范围的机动,并以此来克服固定结构IMMPF 存在的缺陷,同时各模型滤波算法采用不敏粒子滤波(UPF),使重要性密度函数融合了最新量测信息,更好地逼近真实状态的后验概率分布。通过计算机仿真证明,提出的算法可以有效提高IMMPF 的费效比。
1 跟踪模型
考虑如下的随机混合系统:

FSMM 算法(包括IMM)在每个时刻k 使用1 个预先确定的系统模型集合Mf。该模型集合要选择等于或接近所有可能的系统模式集合M。而变结构方法建议在每个时刻k 使用根据包含在量测序列中的所有可能信息来选择的一个时变模型集合Mk⊂M。其基本思想是通过使用当前起作用的模式信息来选择包含在M 中在当前时刻可能的系统模型Mk。
2 自适应网格交互多模型不敏粒子滤波算法
2.1 AGIMM 算法简介
AGIMM 算法[9]从1 个粗略的网格开始,然后在每个递归时间步根据1 个自适应逻辑对网格进行调整,从而实现模型集合自适应调整。在协同转弯机动模型的框架内,描述模型集合的网格设为转弯速率的连续间隔。AGIMM 算法无需事先确定候选模型集合,特别适合系统可能的模型集合很大的情况。
2.2 AGIMMUPF 算法步骤
AGIMMUPF 算法在k 时刻进行滤波之前,首先要进行网格自适应调整:根据k-1 时刻的模型概率和使用的网格(模型集合)Mk-1,计算k 时刻的网格Mk。由此可见,AGIMMUPF 算法和固定结构IMMUPF 算法最根本的区别是在AGIMMUPF 算法中,不同时刻使用的模型集合有可能不相同。由此也产生了如何为新模型分配粒子并确定其协方差的问题。解决方法是基于文献[1]中建立起来的系统模式集合的状态相关性的概念。简单地讲,这个概念就是给定当前系统模式,下一时刻的可能系统模式集合为由马尔可夫规律确定的整个模式集合的1 个子集。当应用到这里的粒子分配并确定其协方差时,为新的模型最优分配粒子,仅考虑那些允许从其他模型切换到这些新模型的模型的粒子及其协方差。
具体讲,新模型mj的粒子(N 为粒子数)可按如下方法得到:为得到粒子,仅使用基于模型集合Ej的粒子这里Ej为Mk-1允许切换到mj中的模型集合,其定义为:
Ej={ml:ml∈Mk-1,plj≠0}。这样,k 时刻基于模型mj的粒子可以用类似于IMMPF 的交互步骤来完成[10]:

混合权重为


AGIMMUPF 算法的详细步骤如下:
1)初始化,k=0
∀mj∈M1,抽取符合先验概率密度的N个粒子及其协方差。
2)交互运算
由于k 时刻使用的模型集合和k-1 时刻的模型有可能不同,对于新模型可以利用式(3)为其分配粒子,并利用式(4)确定协方差,而对于原有的旧模型则仍用文献[10]中的交互步骤进行粒子的输入交互。
3)UKF 滤波,k=1,2,…
∀mj∈Mk,首先计算Sigma 点:

式中:na=nx+nv+nw,λ=α2(na+κ)-na,α 为正值的比例缩放因子,κ 为一个比例参数。并令:

时间更新:

式中:

量测更新:

采样粒子:

式中:N(·)表示高斯函数。
计算权重:
重采样:
输出融合结果:

4)模型概率更新
模型mj∈Mk预测量测的均值和协方差分别为:

粒子的残差为

模型mj的似然函数
各模型概率更新:
5)融合输出
3 仿真结果与分析
为了比较本文提出的AGIMMUPF 算法和固定结构IMMUPF 算法的性能,考虑3 种固定结构IMMUPF算法:FGIMM3UPF,FGIMM5UPF 和FGIMM7UPF。这里FGIMMn(n=3,5,7)表示使用由n 个固定模型组成的模型集合的固定网格IMM 算法。
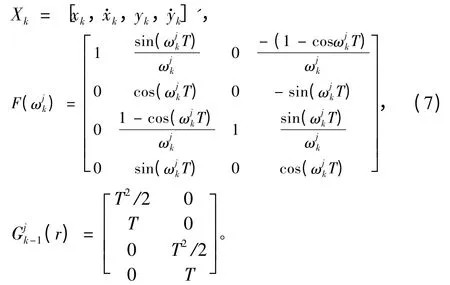
这里的仿真情况考虑对一个强机动目标的跟踪。仿真中采用的机动模型为协同转弯模型[11]。系统状态方程和量测方程如下:

式中:
目标初始状态为[50000,-72,55000,-46]′;机动想定为:在1 ~60 s,156 ~200 s,265 ~310 s,343 ~374 s,414 ~450 s 目标1 做匀速直线运动;在61 ~155 s,201 ~264,311 ~342 s,375 ~413 s,目标1 分别做了4 个180°转弯,转弯速率分别为1.87%,-2.8%,5.6%,-4.68°/s。
FGIMM3UPF 使用的固定网格为{-1.87°/s,0°/s,1.87°/s},FGIMM5UPF 使用的固定网格为{-3.74°/s,-1.87°/s,0°/s,1.87°/s,3.74°/s},FGIMM7UPF 使用的固定网格为{-5.6°/s,-3.74°/s,-1.87°/s,0°/s,1.87°/s,3.74°/s,5.6°/s}。AGIMMUPF 算法的初始网格为{-1.87°/s,0°/s,1.87°/s}。系统过程噪声和量测噪声均为零均值0,方差分别为Q=diag{[3,3]}和R=diag{[200,0.005]}的加性高斯白噪声。采样周期T=1 s。蒙特卡罗仿真次数为50 次。粒子数目为800。
图1 和图2 分别为AGIMMUPF,FGIMM3UPF,FGIMM5UPF 和FGIMM7UPF 算法对目标滤波的位置均方根误差(RMSE)。表1 给出了4 种滤波算法对目标的滤波平均RMSE。平均RMSE 定义为[12]

式中:MC 为仿真次数;L 为仿真长度;x(k)为真实值;为估计值。算法1 ~4 分别代表AGIMMUPF,FGIMM3UPF,FGIMM5UPF 和FGIMM7UPF。表2 为50 次Monte Carlo 各算法所用的时间。

表1 4 种滤波算法的位置平均均方根误差/mTab.1 The mean comparison of RMSE in position for different algorithms size/m

图1 X 轴方向位置RMSE 曲线Fig.1 RMSE in position on X axis
从图1 和图2 可以看出,在对目标的跟踪过程中,FGIMM3UPF 在第3、4 转弯处(转弯率分别为5.6°/s 和-4.68°/s)出现了非常大的误差,这是由于这2 处的转弯率已经大大超出FGIMM3UPF 所使用网格的覆盖范围;FGIMM5UPF 在上述2 处也出现了较大的误差,因为FGIMM5UPF 使用网格的覆盖范围虽然比FGIMM3UPF 大1 倍,但相比于上述2 处的转弯率仍有较大的差距;而 AGIMMUPF 和FGIMM7UPF 的性能明显优于 FGIMM3UPF 和FGIMM5UPF。这是由于FGIMM7UPF 的模型集合完全覆盖了目标的机动方式,而AGIMMUPF 通过自适应网格实现了模型集合自适应调整,也可以完全覆盖目标的机动方式。从表1 可看出,AGIMMUPF 算法的性能稍优于FGIMM7UPF,这说明对于固定结构IMMUPF 而言,使用过多的模型会导致在当前时刻所使用的模型之间存在不一致,从而引起模型之间不必要的竞争,因此未必能保证跟踪性能的提高。从表2还可看出,AGIMMUPF 计算量比FGIMM3UPF 高约12%,只有FGIMM7UPF 的40%。综合上面分析可知,AGIMMUPF 可以提高IMMPF 算法的费效比。
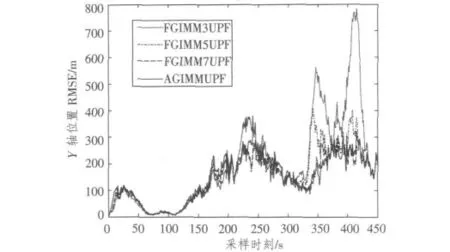
图2 Y 轴方向位置RMSE 曲线Fig.2 RMSE in position on Y axis

表2 50 次Monte Carlo 仿真各算法所用时间Tab.2 Computation time of 50 Monte Carlo simulation used by the algorithms
4 结 语
本文将一种变结构多模型算法——自适应网格交互多模型(AGIMM)算法和UPF 算法相结合,提出了自适应网格交互多模型不敏粒子滤波算法(AGIMMUPF)。该算法通过自适应网格实现了模型自适应,从而以较小的模型集合覆盖了目标大范围的机动,并以此来克服固定结构IMMPF 存在的缺陷,同时各模型滤波算法采用不敏粒子滤波(UPF),使重要性密度函数融合了最新量测信息,更好地逼近真实状态的后验概率分布。通过计算机仿真证明,提出的算法可以有效提高IMMPF 的费效比。
[1]LI X R,BAR-SHALOM Y.Multiple-model estimation with variable structure[J].IEEE transactions on automatic control,1996,41(4):478-493.
[2]CAPPE O,GODSILL S J,et al.An overview of existing methods and recent advances in sequential Monte Carlo[J].Proceedings of the IEEE,2007,95(5):899-924.
[3]BOERS Y,DRIESSEN J N.Interacting multiple model particle filter[J].IEE Proceedings-Radar Sonar Navigation,2003,150(5):344-349.
[4]DRIESSEN H,BOERS Y.Efficient particle filter for jump Markov nonlinear systems[J].IEE Proceedings-Radar Sonar Navigation,2005,152(5):323-326.
[5]MORELANDE M R,CHALLA S.Maneuvering target tracking in clutter using particle filters[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(1):252-270.
[6]刘贵喜,等.改进的交互式多模型粒子滤波跟踪算法[J].电子与信息学报,2007,29(12):2810-2813.
LIU Gui-xi,et al.Tracking algorithms based on improved interacting multiple model particle filter[J].Journal of Electronics & Information Technology,2007,29(12):2810-2813.
[7]张俊根,等.IMM 迭代扩展卡尔曼粒子滤波跟踪算法[J].电子与信息学报,2010,32(5):1116-1120.
ZHANG Jun-gen,et al.IMM iterated extended Kalman particle filter based target tracking[J].Journal of Electronics & Information Technology,2010,32(5):1116-1120.
[8]FOO P H,et al.Combining the interacting multiple model method with particle filters for manoeuvring target tracking[J].IET Radar Sonar Navig.,2011,5(3):234-255.
[9]党玲,许江湖,王永斌.自适应网格交互多模型算法[J].火力与指挥控制,2004,29(4):51-54.
DANG Ling,XU Jiang-hu,WANG Yong-bin.Adaptive grid interacting multiple model algorithm[J].Fire Control and Command Control,2004,29(4):51-54.
[10]朱志宇.粒子滤波算法及其应用[M].北京:科学出版社,2010.
[11]LI X R,et al.Design of an interacting multiple model algorithm for tracking in air traffic control systems.IEEE Transactions on Control Systems Technology,1993,1(3):186-194.
[12]胡士强,敬忠良.粒子滤波原理及其应用[M].北京:科学出版社,2010.
