交流伺服系统Ziegler-Nichols PI滑模并行复合控制*
2012-11-24吴文江郭亚军
张 营,吴文江,郭亚军
(1.济宁学院 物理与信息工程系,山东 曲阜 273155;2.中科院沈阳计算技术研究所,沈阳 110171;3.南京理工大学机械工程学院,南京 210094)
0 引言
永磁同步电机是机床传动的主要执行机构,但是由于控制模型中含有众多非线性因素,所以传统的PI控制方法对于机床这种变负载、多干扰系统只能整定出一组固定的PI参数,往往会出现超调量过大、过渡过程时间长,系统鲁棒性不强的缺点。
近年,虽然许多研究者将神经网络[1]、自适应控制[2-3]、模糊控制[4-6]、遗传算法[7-8]及专家系统等引入到PI参数整定中,克服了常规PI控制器的不足,但是由于智能及先进算法存在结构复杂、收敛速度慢和初值选定较难等[9]缺点,推广应用还存在较多问题。
国外学者 Rajani K.Mudi及 Chanchal Dey等人[10]根据误差的变化趋势,通过设定调节因子,对经典控制器的比例积分参数进行实时调节,从而达到改善系统控制特性的目的。因此本文根据伺服系统静动态指标,将这种控制策略应用到交流伺服系统的位置控制中,通过仿真实验,验证了该控制器实施的可行性。
1 并行复合控制器设计
并行复合控制主要是根据切换控制理论,通过设定误差值,使两种算法在系统中进行切换使系统达到最佳状态,由此分别设计滑模控制器和Ziegler-Nichols PI控制器,在此基础上得到并行复合控制结构。
1.1 位置环滑模控制器设计
由于速度环响应远比位置响应快,即位置环截止频率远小于速度环各时间常数的倒数。
在推导控制率时,可将速度环等效为一阶惯性环节。
令e2=,考虑位置给定为阶跃信号情况下可得状态方程为:

取位置滑模线性切换函数为:

式中,c3为正常数。
令位置环滑模变结构控制器输出为:
由滑模到达条件可得位置环滑模变结构控制器参数为:

1.2 Ziegler-Nichols PI控制器设计
Ziegler-Nichols PI控制器的基本组成为调节因子、误差函数、误差变化率函数及调节速率等,控制器结构原理如图1所示。图1中α为调节因子,ΔeN为归一化后的误差变化率,eN归一化后的误差,k为反馈系数。其中ΔeN及eN可分别表示为:

式中,ωref为给定值,ωf为反馈值,ωref-max为给定值的最大值,e(k)为误差。

图1 控制器结构框图
由式(5)~(7)可推出调节因子α为:

经典数字PI控制算式通常为:

式中,i(k)为控制输出,Kp为比例系数,Ki为积分系数。
将(8)式代入以下调节函数可得:

式中,k1为比例调节速率,k2为积分调节速率为修正后的比例系数为修正后的积分系数。
根据式(8)与式(10)可得到调节因子α在闭环系统中始终处在范围-1~1之间,由以上分析得出Ziegler-Nichols PI控制算式为:

式中,i*为控制器输出。
由以上的分析可推出复合控制简化原理图如图2所示。
2 基于电流解耦控制的永磁同步电动机线性化数学模型
假设:①不考虑饱和效应;②电动机的气隙磁场为均匀分布,且感应反电动势为正弦波状;③不计磁滞与涡流损耗;④励磁电流没有动态响应;⑤转子无励磁绕组;⑥采用转子磁极位置定向矢量控制定子电流励磁分量Id=0。
根据如上假设,可写出转子坐标系即dq坐标系下系统的线性化数学模型。

式中,ud,uq为dq坐标系上的电枢电压分量;iq,id为dq坐标系上的电枢电流分量;L为dq坐标系上的等效电枢电感(L=Ld=Lq);R,ωr为电枢绕组电阻和dq坐标系的电角速度;Ψf,pn为永久磁铁对应的转子磁链和电机极对数。
3 仿真及实验
根据数学模型分别设计滑模控制器和Ziegler-Nichols PI复合控制器。主要参数如下:电机及负载转动惯量经折算后为J=2.627×10-3kg·m2;摩擦力矩经折算后为4.86N·m;系统外部干扰力矩及未建模动态折算后为10N·m,电磁转矩系数Kt=1.11N·m/A;阻尼系数B=1.43×10-4N·m·s;定子电阻Ra=2.6Ω;绕组电感Ld=Lq=50×10-3H;额定电流Ie=6.4A;容许最大电流Imax=12.8A;磁极对数Pn=4。滑模控制器参数取:c3=47,α1=11,β1=-14,α2=0.02,β2=-0.005。Ziegler-Nichols PI控制器仿真参数取:Kp=10,Ki=1.2,k1=1.5,k2=2.4,α=0.5。复合控制器误差设定值为0.08。PI控制器位置环参数取kp1=10,kI1=0.01。

图2 并行复合控制结构
(1)常值负载干扰
假设仿真在第1s时加入一个阶跃扰动10N·m,系统在PI控制和滑模Ziegler-Nichols PI复合控制下位置输出响应曲线如图3及图4所示。从图中可以看出,采用传统PI算法具有较快的上升时间,当负载出现扰动时,位置响应出现较大的偏移,并且需要较长时间才能恢复到平稳位置。而采用滑模Ziegler-Nichols PI复合控制时,系统具有较强的抗干扰能力,受外界作用力较小,并且短时间内能达到平衡状态。

图3 施加负载扰动时的传统控制响应曲线

图4 施加负载扰动时的复合控制响应曲线
(2)系统参数摄动
为了验证伺服系统参数发生摄动时的控制效果,假设系统转动惯量由J=2.627×10-3kg·m2变为J=5.254×10-3kg·m2,分别对系统采用以上两种控制方案,得到位置响应曲线如图5及图6所示。从图中可以看出,采用PI控制时,系统出现了较大超调,之后又趋于平稳。而采用滑模Ziegler-Nichols PI复合控制时,系统响应超调较小,调节时间短。
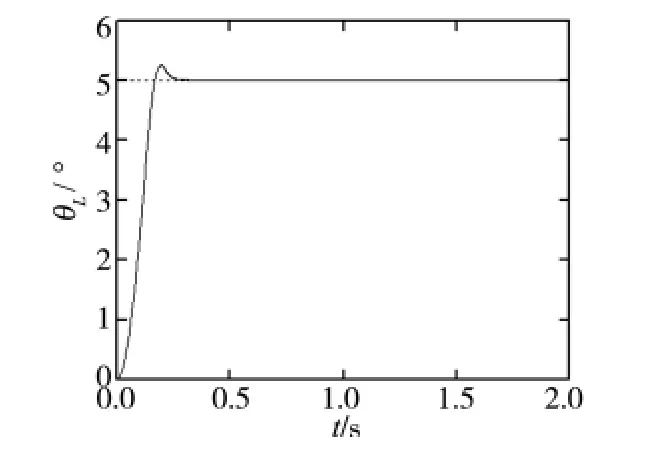
图5 转动惯量变化时的经典控制响应曲线
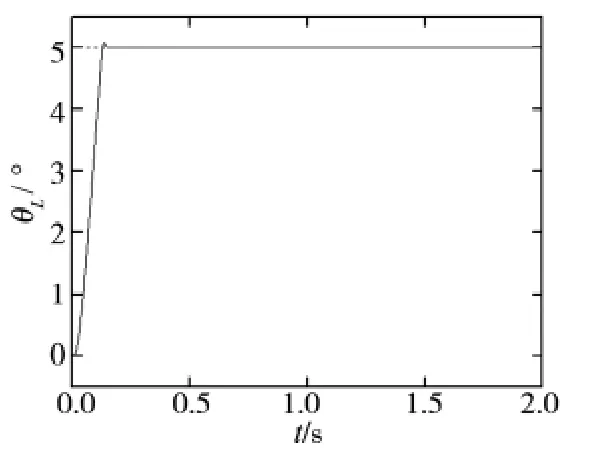
图6 转动惯量变化时的复合控制响应曲线
(3)正弦跟踪实验
系统的跟踪目标函数为:65sin(0.7166t),其跟踪误差曲线如图7和图8所示。从图中可以看出,复合控制相对于传统PI控制有好的跟踪特性,误差较小。

图7 传统控制误差曲线

图8 复合控制误差曲线
4 结束语
本文针对交流伺服系统的位置控制,结合滑模变结构控制理论和Ziegler-Nichols PI控制理论的优点,提出了一种并行复合控制策略。通过对系统位置环的分析,建立了滑模变结构位置环控制器和Ziegler-Nichols PI控制器。仿真结果表明,当系统的参数摄动及受外部扰动时,该控制方案能实现系统的鲁棒控制。滑模控制在较强鲁棒性的前提下,保证了系统跟踪的位置误差。Ziegler-Nichols PI控制实时调节系统控制器参数,减少了控制效果对人为因素的依赖。同时可以看出,算法的推导较为简单,曲线响应满足系统要求,初值选定只需要简单调节既能使动态响应符合要求。
[1]赵希梅,郭庆鼎.PMSM伺服系统的转动惯量辨识和控制器参数优化[J].组合机床与自动化加工技术,2009(11):75-77.
[2]Yu Jinpeng,Chen Bing,Yu Haisheng.Adaptive fuzzy tracking control for the chaotic permanent magnet synchronous motor drive system via backstepping[J].Nonlinear A-nalysis:Real World Applications,2011,12(1):671-681.
[3]Jun Lu,Hai Xin Zou,Lie Shen,et al.Application of Adaptive Fuzzy-PID Control in Servo Spindle Rigid Tapping[J].Advanced materials Research,2011,301-303:1477-1481.
[4]Kong Xiaohong,Zhang Baojian,Mao Xinhua.Design and Application of Self-Tuning PI Controller[J].Applied Mechanics and Materials,2010,43:160-164.
[5]叶汉民,朱伟.基于滑模变结构及模糊控制的异步电机调速系统的研究[J].组合机床与自动化加工技术,2011(6):74-77.
[6]孙夏娜,俞群明,周兵,等.主动悬架单神经元模糊PID控制策略与仿真[J].系统仿真学报,2009,21(8):2165-2168.
[7]Jan Rong-Maw,Tseng Chung-Shi,Liu Ren-Jun.Robust PID control design for permanent magnet synchronous motor:A genetic approach [J].Electric power systems research,2008,78:1161-1168.
[8]郝齐,关立文,王立平.基于遗传算法并联机床电机伺服系统控制参数整定[J].清华大学学报,2011,50(11):1801-1806.
[9]彭继慎,王强,刘栋良,等.永磁同步电动机的速度自适应反推控制[J]. 煤炭学报,2006,31(4):540-544.
[10]Rajani K.Mudi,Chanchal Dey,Tsu-Tian Lee.An improved auto-tuning scheme for PID controllers[J].ISATransactions,2009,48:396-409.