六足步行机器人腿机构绳传动系统设计与仿真
2012-11-24杨若霁
杨若霁,陈 峰
(上海海事大学物流工程学院,上海 200135)
0 引言
步行机器人是采用腿式结构来完成多种移动功能的一种移动式机器人。与同属于移动机器人的轮式、履带式机器人相比,步行机器人在不平或松软的地面上运动时,有机动性好、能耗小等特点。因此,步行机器人技术一直是国内外研究热点之一。而步行机器人类别中的六足步行机器人具有三足立地稳定裕度大、步行速度快等特点。可以说,对六足步行机器人的研究,具有更加特殊的重要性。
腿机构是六足步行机器人的主要执行部件,它一方面要支承机器人躯体的重量,另一方面要实现机器人的步行运动。六足步行机器人腿部传动系统决定了腿的形式、重量、转动惯量、运动空间、运动精度、动力特性和能承受载荷的大小等机械性能,也决定着所配计算机控制系统的控制性能。因此,对六足步行机器人腿部传动系统的设计是相当关键的。
六足步行机器人腿部传动系统有很多种,如齿轮传动、连杆传动、绳传动等。与其他传动方式相比,绳传动系统以结构简单、惯性小和运动速度快等优点,受到了国内外研究者的高度重视。典型的六足步行机器人腿部绳传动系统有两种。一种是带有单槽轮的钢丝绳摩擦传动[1-2],这种绳传动方式类似于带传动,通过钢丝绳与滑轮之间的摩擦力实现传动,其主要缺点是:①传动效率较低,②运行一段时间后绳与滑轮会出现磨损而发生打滑,③机器人腿部不能承受较大负载。另一种是带有螺旋槽轮的钢丝绳摩擦传动[3-4],该传动方式是一种绳及卷筒传动,螺旋槽轮旋转时将钢丝绳带入绳槽,借助楔形的作用产生较大的摩擦力实现传动,其主要缺点是:①螺旋槽轮加工困难,②钢丝绳的安装布置不方便,③螺旋槽轮轴向尺寸较大,不适合安装在要求结构小、运动灵活的机器人腿机构上。
本文针对典型绳传动系统的缺点,设计了一种六足步行机器人腿机构绳传动系统。
1 新型绳传动系统的设计
在设计机械传动系统时,传动系统应满足机器生产过程和工艺动作的要求;而且应力求简单可靠,方便控制,并尽可能采用最合理的传动级数,以减小传动装置的外廓尺寸和提高传动系统的运动精度及效率。
典型的六足步行机器人腿部绳传动系统之所以存在诸多缺点,最主要的原因是它们都依靠钢丝绳与滑轮之间的摩擦力来进行传动。据此,我们设计了一种如图1所示的依靠钢丝绳拉力进行传动的绳传动系统。

图1 新型绳传动系统结构图
图1中,主动杆是与驱动器输出轴相连的杆,从动杆则是与腿部关节相连的杆。主动杆与从动杆布置在同一平面上,相互平行,且它们的杆长相等。钢丝绳a、钢丝绳b分别布置在主动杆和从动杆的两端,并与两杆形成转动副。两根钢丝绳相互平行且长度相等。主动杆与从动杆的旋转中心位于各自杆长的中点。
由于绳受拉传力而受压不传力,故绳传动系统的工作原理为:当主动杆逆时针旋转时,钢丝绳a受压不传力,而钢丝绳b产生拉力使从动杆作逆时针旋转;当主动杆顺时针旋转时,钢丝绳b受压不传力,而钢丝绳a产生拉力使从动杆作顺时针旋转。
因钢丝绳受拉时弹性伸长量极小,可忽略不计,根据绳传动系统的几何关系我们可以推出:无论主动杆作逆时针旋转还是顺时针旋转,绳传动系统的运动方式都与平行四边形机构相同,即作同向等角速度运动。
与典型的步行机器人腿部绳传动系统相比,这种新型的绳传动系统有以下几个优点:①刚性杆件容易加工,②钢丝绳安装起来极为方便,③结构更简单、小巧且质量更轻,④不存在打滑的问题,传动效率更高,⑤由于该系统采用了同向等角速度传动,控制与测算腿部位移较为方便。
2 绳传动腿机构的设计
自然界中,许多昆虫的腿部结构[5]大致如图2所示,基节、股节和胫节三部分分别绕着跟关节、髋关节和膝关节做单自由度旋转运动,属于一个三自由度开式链结构。本文利用新型绳传动系统的优点,设计了一种如图3所示的仿昆虫绳传动腿机构。

图2 昆虫腿部结构示意图

图3 绳传动腿机构图
图3中,轴1分别与固定架、连接架、摆动杆形成转动副,从而组成跟关节;基节挡板1、基节挡板2和两台驱动器组成基节;轴2分别与基节、股节形成转动副,从而组成髋关节;轴3分别与股节、胫节形成转动副,从而组成膝关节。两台驱动器安装在基节挡板2上;固定架与机器人躯干固结在一起;连接架通过连接孔,用螺栓与基节挡板1、2相连接;摆动杆与连接架固结在一起,摆动杆的外形轮廓与图1中的从动杆相似,且其旋转中心与轴1同心,它的作用是使跟关节绕轴1来回摆动。这样,当摆动杆两端用钢丝绳连接后,依靠主动杆的旋转就能控制腿机构完成跨步动作(见图5)。
图4为绳传动腿机构内部结构图。杆1和杆2是主动杆,它们分别与图3中两台驱动器的输出轴相连。杆3、杆4是从动杆,它们分别与股节和胫节的一端固结在一起,并分别与轴2、轴3形成转动副。过渡杆由两根杆固结而成,过渡杆上杆所在平面与过渡杆下杆所在平面平行,两杆互成一定角度。杆1和杆3处在同一平面上;杆2和过渡杆下杆处在同一平面上;过渡杆上杆和杆4处在同一平面上。过渡杆与轴2形成转动副;股节的另一端与轴3形成转动副。杆1和杆3两端用一对钢丝绳连接;杆2和过渡杆下杆两端用一对钢丝绳连接;过渡杆上杆和杆4两端用一对钢丝绳连接。

图4 腿机构内部结构图
当杆1作逆时针旋转时,与杆3相固结的股节,在钢丝绳的传动下,也作逆时针旋转。当杆2作逆时针旋转时,过渡杆下杆在钢丝绳的传动下,也作逆时针旋转;由于过渡杆下杆与过渡杆上杆固结在一起,过渡杆下杆在作逆时针旋转的同时,过渡杆上杆也在作逆时针旋转,且上下两杆转角一致,从而使与杆4相固结的胫节,在钢丝绳的传动下,也作逆时针旋转。这样,当杆1、杆2同时同向旋转相同角度后,股节和胫节也同时同向旋转相同的角度,从而实现腿机构的抬放腿动作。
3 六足绳传动步行机器人的整体布局
六足绳传动步行机器人的整体结构如图5所示,它由躯干、驱动器和六条腿构成。所有驱动器均采用舵机。躯干部分布置六台舵机通过钢丝绳连接分别驱动六条腿机构上的跟关节实现正反转。
4 仿真实验与样机制作
4.1 建立仿真模型
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件是集建模、计算、后处理于一体的虚拟样机仿真分析软件[6]。在ADAMS软件中进行运动仿真,首先要建立三维模型。模型建立一般有两种方法:一种方法是在Adams/View模块中直接建模;另一种方法是在其他三维软件中建好模型后导入Adams软件中。此处采用的是第二种方法,建模时运用的是SolidWorks软件。
关于钢丝绳的建模,虽然ADAMS软件中没有提供直接的建模方法,但我们可以利用Adams/View提供的快速创建柔性连杆的(discrete flexible link)建模方法,即把钢丝绳看作由若干个刚体组成,通过定义柔性连杆的材料、实体的段数、梁单元的衰减率和两端点的连接方式近似地模拟钢丝绳[7]。
六足绳传动步行机器人仿真模型的各构件(除舵机外)材料均定义为钢材。腿机构的初始位置设定为:股节与胫节的夹角为60度,股节与基节的夹角为40度。图6为六足绳传动步行机器人仿真模型图,其中黄色部分为地面。
4.2 步态选择
六足步行机器人的步态是多样的。其中“3+3”步态,即三角步态,是六足步行机器人实现步行的典型步态,它可以保证一半足抬离地面时还能提供三角支撑,并可以在保持静态稳定性条件下允许较快的行走速度。文献[8]详细说明了这种步态的规划,图7、图8为直行、转弯三角步态示意图。我们采用该三角步态对所设计的六足绳传动步行机器人进行运动仿真。

图6 六足绳传动步行机器人仿真模型图

图7 直行三角步态示意图

图8 转弯三角步态示意图
4.3 运动仿真
仿真模型建立以后,我们依此给各个部件加入材料密度、重心和转动惯量等物理参数。根据机器人的总体设计和所采用的步态,在腿、躯干以及各杆件之间分别添加转动副和固定副约束,在与舵机相连的主动杆转动副上添加step阶跃驱动函数,并且在各腿和地面之间利用实体和实体接触形式创建六个接触力和摩擦力。仿真时间设定为10.5秒,步数设定为250步,在重力环境下进行运动仿真。
图9为机器人按所采用的直行步态进行仿真运动的实验图,其中,(1)代表图7中a~b的步态,(2)代表图7中c的步态,(3)代表图7中d~e的步态。图10为机器人按所采用的转弯步态进行仿真运动的实验图。其中,(1);(2);(3)分别代表图8中a~b;c;d~e的步态。由此,我们得出:所设计的步行机器人可按给定步态进行运动。
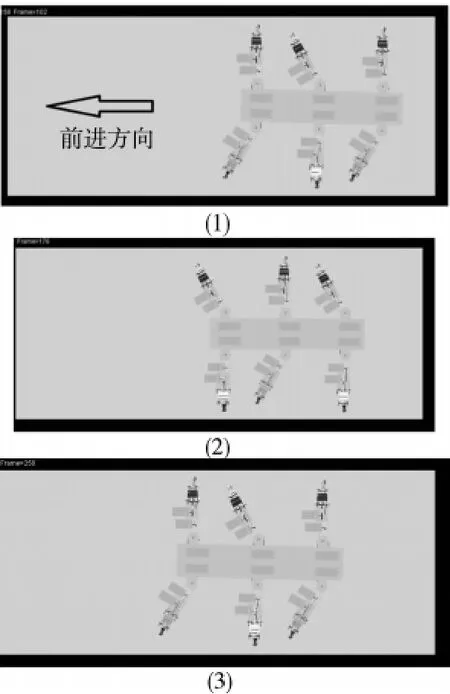
图9 机器人直行步态仿真图

图10 机器人转弯步态仿真图
4.4 样机制作
我们根据本文所设计的绳传动系统及仿真结果,制作了六足绳传动步行机器人的真实样机。整个机体的外形尺寸为:长 300mm,宽 300mm,高165mm。它由机械系统(躯干和腿机构钢板、传动杆件、钢丝绳)、驱动系统(18台舵机)、控制系统(单片机)和电源组成。主要部件的参数见表1。为方便控制,所有舵机均采用MG995全金属齿轮13公斤大扭力舵机;钢丝绳采用直径为1mm的24丝钢丝绳,它能承受120kg的力;采用AT89S51型单片机;主电源为6.5V。所有部件安装好后,总质量约为4kg。按所采用的步态,编写好相应程序,程序框图如图11所示。

表1 主要部件参数

图11 程序框图
由于依靠钢丝绳拉力的绳传动系统消除了典型绳传动系统中绳与轮打滑和摩擦力对于机器人承载能力的影响[9];而且只要钢丝绳的破断拉力[10]和舵机扭矩足够,采用新型绳传动系统的机器人在承载能力方面比典型绳传动机器人更具有优势。在进行样机步行和承载能力实验后,我们得出:该机器人结构紧凑小巧、布局合理,传动系统简单可靠,部件加工安装方便,承载能力强,约为机器人自身重量的1倍左右,且步行时机体平稳,速度平均可达15mm/s。图12为该六足绳传动步行机器人样机照片。通过进一步的环境适应能力实验,我们还发现该机器人能够在凹坑、沙地、废墟、草地等各种复杂地形中行走,在狭小缝隙间穿行,在装有摄像头、生命探测仪、经纬度定位器、通讯设备等后可以用于地质勘探和灾区救援。

图12 六足绳传动步行机器人样机照片
5 结束语
国内对于六足步行机器人腿机构绳传动系统的研究并不多,本文针对典型绳传动系统的缺点,设计了一种简单、小巧、实用的新型绳传动系统,并将其应用到六足步行机器人腿机构上,由此完成了六足绳传动步行机器人整机的设计。采用ADAMS软件建立了绳传动步行机器人的虚拟样机,通过仿真,验证了设计的可行性。在此基础上,制作了真实样机,为进一步研究六足绳传动步行机器人奠定了基础,从而具有现实的参考意义。
[1]Xiaolei Yin,Alan P.Bowling.Dynamic Performance Limitation Due to Yielding in Cable-Driven Robotic Manipulators[J].Journal of Mechanical Design,Jan.2006,Vol.128,pp.1-11,Notre Dame,USA.
[2]K.Arikawa,S.Hirose.Mechanical design of walking machines[J].Philosophical Transactions of The Royal Society A,2007,365:171-183.
[3]Yanto Go,Alan Bowling.A Design Study of a Cable-Driven Hexapod[J].IEEE,2006:394-399.
[4]郭鸿勋,陈学东.六足步行机器人机械系统[J].组合机床与自动化加工技术,2008(4):71-75.
[5]J.T.Watson,R.E.Ritzmann.Leg kinematics and muscle activity during treadmill running in the cockroach[J].Springer-Verlag,1998,182:11-22.
[6]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2009.
[7]李海军,杨兆建.Adams中钢丝绳索类物体建模方法研究[J].机械管理开发,2007(4):4-7.
[8]苏军.多足步行机器人步态规划及控制的研究[D].华中科技大学,2004.
[9]金忠庆.钢丝绳精密传动机构的分析与实验研究[D].国防科学技术大学,2006.
[10]王奎生.钢丝绳生产工艺与设备[M].北京:冶金工业出版社,1993.