基于改进的速度同步控制的电液负载模拟器
2012-11-16汪成文焦宗夏罗才瑾
汪成文, 焦宗夏, 罗才瑾
北京航空航天大学 飞行器控制一体化技术重点实验室, 北京 100191
基于改进的速度同步控制的电液负载模拟器
汪成文, 焦宗夏*, 罗才瑾
北京航空航天大学 飞行器控制一体化技术重点实验室, 北京 100191
对地面半实物加载仿真实验中存在的“多余力”问题进行分析和研究。首先建立了电液加载系统的数学模型,提出“多余力干扰系数”的概念,并给出定义方法。利用多余力干扰系数对多余力“成分”进行定量分析,理论分析传统“速度同步控制”抑制多余力的机理以及存在的问题,并提出了改进方法。在传统“速度同步控制”的基础上,提出利用舵机和加载系统的速度差对“多余力”进行二次抑制。实验结果验证了改进方案的有效性。基于改进方法,电液负载模拟器取得了理想的动态加载效果,“多余力”抑制能力较传统的“速度同步控制”方法提高了25%以上。
负载模拟器; 多余力矩; 速度同步; 干扰系数; 同步马达; 半实物仿真
作为地面半实物仿真的关键设备,负载模拟器的主要功能是在实验室中复现飞行器飞行过程中舵面受到的空气动力载荷,目的是验证飞控系统的控制参数,考核舵机系统的带载性能。负载模拟器的成功应用不但可以缩短飞行器的研制周期、降低研制成本,而且可以提高飞行器研制的成功率[1-2]。根据动力源不同,负载模拟器可分为液压式、电动式和气动式3种[3]。电液负载模拟器具有功率密度大,响应速度快、电磁兼容性好等优点而得到广泛的研究和关注。因此,研究高精度的电液负载模拟器具有重要的现实和战略意义。
地面加载实验要求尽可能准确,只有这样半实物仿真的实验数据才有参考意义。然而,影响加载精度的因素有很多,比如摩擦、液压系统固有的非线性特性等[4],但制约加载精度最重要的因素是舵机运动所引起的干扰,即所谓的“多余力”问题[5]。“多余力”是由负载模拟器的工作方式决定的,加载马达与舵机轴刚性连接,加载系统要对运动中的舵机进行加载,舵机的运动对加载系统造成强烈干扰。针对如何抑制“多余力”这个课题,国内外学者开展了深入、广泛地研究。
文献[6]~文献[8]提取舵机速度作为补偿信号,基于前馈补偿思想,对多余力进行补偿。文献[9]针对方程式赛车研制了结构强度测试系统,虽然赛车本身没有主动运动,但考虑加载时赛车结构变形较大,为加载系统设计了基于扰动观测器的鲁棒控制器。控制器设计过程中也用到了加载对象的速度信号,本质上也是一种利用被加载对象速度进行补偿的方法。文献[10]和文献[11]研究了舵机系统与加载系统连接刚度对多余力的影响。文献[12]和文献[13]探讨了系统惯量对多余力的影响。文献[14]~文献[16]设计了一种结构新颖的加载马达,提出了一种新的电液加载结构,在加载马达与基座之间引入一个位置同步马达,位置同步马达的转子和加载马达的定子连接,从而使加载马达处于“悬浮”状态。位置同步马达作为角度伺服系统,接受与舵机系统相同的位置指令,和舵机系统同步运动,使原来由加载马达承担的加载和运动任务分别由加载马达和位置同步马达来承担,从而减小多余力。文献[17]利用同步马达和加载马达的速度差进行前馈,实现多余力的二次补偿。文献[18]和文献[19]研究了QFT在电液加载系统中的应用。文献[20]和文献[21]为电液加载系统设计了模糊PID控制器,但文献[20]和文献[21]仅仅考虑了电液加载系统的非线性以及参数不确定性引起的干扰,并没有针对“多余力”问题进行讨论。文献[22]提出将舵机伺服阀控制电流引入加载系统,提出了电液负载模拟器“速度同步控制”策略,取得了较为理想的多余力抑制效果。
本文以电液加载系统为研究对象,以抑制“多余力”为研究目标,在前人的基础上,研究如何进一步提高“多余力”的抑制能力。文章具体安排如下:第1节建立加载系统的数学模型。第2节提出多余力干扰系数的概念,对构成多余力的成分进行定量分析。在“速度同步控制”方案的基础上,提出利用舵机和加载系统速度差对多余力进行二次补偿。第3节实验验证,并对实验数据进行分析。第4节总结。
1 加载系统数学模型
电液负载模拟器结构如图1所示,图中左侧部分表示舵机系统,右侧代表加载系统。为便于数学推导,作如下假设:①伺服阀为理想零开口,4个节流口对称;②供油压力稳定,回油压力为零;③油液弹性模量为常值。

图1 电液负载模拟器结构示意图Fig.1 Architecture of electro-hydraulic loading simulator
加载马达两腔流量方程:
(1)
(2)
式中:Q1为流入加载马达A腔的流量;Q2为流入加载马达B腔的流量;DL为加载马达排量;V1为加载马达进油腔体积;V2为加载马达出油腔体积;P1为加载马达进油腔压力;P2为加载马达出油腔压力;βe为油液弹性模量;Ct为加载马达内泄系数;θL为加载马达角位移。
定义负载流量QL为

(3)
定义负载压力PL为
PL=P1-P2
(4)
注意到:
V1=V-V2
(5)
式中V为加载系统总的控制容腔体积。
(6)

(7)
式中:Ps为系统油源压力。
根据式(1)~式(7)可得:
(8)
加载阀流量方程为

(9)
式中:Cv为加载阀流量系数;xv为加载阀阀芯位移;ω为加载阀窗口面积梯度;ρ为油液密度。
线性化后可得伺服阀的负载流量方程为
QL=Kqxv-KpPL
(10)
式中:Kq为加载阀流量放大系数;Kp为加载阀流量-压力系数。
Kq和Kp分别为
(11)

(12)
加载轴力矩平衡方程为

(13)
式中:JL为加载马达转子惯量;BL为加载系统阻尼系数;T为加载力矩。
加载力矩的表达式为
T=Gs(θL-θR)
(14)
式中:Gs为扭矩传感器刚度;θR为舵机角位移。
对式(8)和式(10)进行Laplace变换,整理可得:
(15)
定义加载伺服阀总刚度系数Kt为
Kt=Ct+Kp
(16)
对式(13)进行Laplace变换,并考虑式(15)和式(16)可得:

(17)
式中s为微分算子。
对式(14)进行Laplace变换,

(18)
将式(18)代入式(17)可得:
(19)
式中:
A(s)=Kq·DL
(20)
(21)

(22)
2 改进的“速度同步控制”策略
2.1 多余力干扰系数
由式(19)可以看出,加载系统输出力矩由2部分构成。分子的第1部分为主动控制项,即可以通过控制阀芯位移来控制力矩输出。分子的第2项,即B(s)sθR(s)项为干扰项,表征了舵机主动运动状态对输出力矩造成的影响,即所谓的“多余力”。由式(21)可以看出,“多余力”大小和舵机的运动速度、加速度以及加速度的变化率相关。从理论上分析,要彻底抑制“多余力”干扰,应该从舵机的速度、加速度以及加速度变化率引起的干扰3个方面进行研究。但3个干扰因素究竟对“多余力”各自产生多大的“贡献”对加载系统控制方案的设计至关重要。为了定量分析舵机速度、加速度以及加速度变化率对多余力的影响,本文提出“多余力干扰系数”的概念,即,“多余力速度干扰系数λv”、“多余力加速度干扰系数λa”以及“多余力加加速度干扰系数λaa”。具体定义方法如下(设舵机作正弦运动,运动频率为hHz):
① 多余力速度干扰系数λv定义为加载系统数学模型分子干扰项中,与舵机速度相乘的多项式所决定的系数。
② 多余力加速度干扰系数λa定义为舵机运动频率乘以加载系统数学模型分子干扰项中,与舵机加速度相乘的多项式所决定的系数。
③ 多余力加加速度干扰系数λaa定义为舵机运动频率的平方乘以加载系统数学模型分子干扰项中,与舵机加速度的导数相乘的多项式所决定系数。
从以上定义可以看出,λa和λaa与舵机的运动频率相关。根据加载系统数学模型的复杂程度以及具体形式不同,3个系数的计算公式并不唯一,但利用“多余力干扰系数”概念,可以定量的分析多余力的“成分构成”,从而为加载系统控制方案的设计提供理论依据。
设3个干扰系数的和为λ,显然,3个干扰系数与λ的比值定量地描述了舵机速度、加速度以及加速度变化率对多余力的“贡献”。根据第1节建立的数学模型,加载系统数学模型分子的干扰项为B(s)sθR(s),根据前文定义,以本文建立的加载系统数学模型为例,3个干扰系数的具体计算公式如下:
多余力速度干扰系数为
(23)
多余力加速度干扰系数为
(24)
多余力加加速度干扰系数为

(25)
结合本文所用实验台主要参数(见表1),首先计算3个干扰系数,然后求出3个干扰系数与λ的比值。考虑测试舵机工作频率小于30 Hz,舵机运动频率分别取1、10、20、30 Hz。计算结果见表2。从表2计算结果可以看出,对本实验台而言,即便是在舵机运动频率高达30 Hz的情况下,舵机加速度和加速度变化率引起的多余力也只占其整体的3 %左右,完全可以忽略。
可以看出,对于本文研究的加载系统而言,在舵机正常的工作频宽范围内,舵机速度引起的多余力占据绝对的主导地位,因此,只需关注舵机运动速度引起的多余力即可。

表1 电液负载模拟器参数Table 1 Parameters of EHLS

表2 计算结果Table 2 Calculation results
2.2 基于舵机和加载系统速度差的多余力二次补偿策略
根据2.1节对3个干扰系数的计算、分析,式(19)可简化为
(26)
式中sθR(s)代表舵机的运动速度。根据式(26),如果能使加载马达和舵机系统同步运动,多余力就能够被较彻底的抑制。液压系统的运动速度主要由负载流量决定,而阀控系统的负载流量和阀开口密切相关,阀开口是由伺服阀输入电流控制。因此,舵机伺服阀的控制信号包含了丰富的舵机速度信息。从舵机系统的数学模型角度出发,也可以得到类似的结论。因为阀控位置伺服系统的数学模型在低频段近似为一个积分环节[22],伺服阀控制指令作为积分环节的输入,实际上就是舵机系统的速度指令,这也是文献[22]提出“速度同步控制”方案的出发点之一。基于文献[22]提出的“速度同步控制”方法,文献[23]和文献[24]中取得了较为理想的多余力抑制效果。
根据前面的分析,多余力抑制的关键在于速度同步,从多余力抑制角度出发,传统“速度同步控制”是一种开环补偿,如果能将舵机和加载系统的速度差进行反馈,必定可以进一步提高加载系统和舵机系统二者的速度同步精度,进而进一步减小“多余力”。
综上所述,“基于舵机和加载系统速度差的多余力二次补偿方案”控制原理如图2所示。本方案利用舵机和加载系统的速度差信号提高二者的速度同步精度,实现多余力的二次补偿。

图2 基于速度差的多余力二次补偿原理Fig.2 Block diagram of secondary compensation for surplus torque based on velocity difference
3 实验验证
3.1 实验台
本文所用实验台如图3所示,试验台的结构示意图见图4。

图3 试验台Fig.3 Test rig
整个实验系统主要可以分成4部分:油源系统,台体,加载通道和舵机模拟通道。加载通道主要由液压摆动马达,马达支架,伺服阀,油路块,力矩传感器,光电编码器构成。油源溢流阀的溢流开启压力设定为31 MPa,通过调节比例减压阀的控制电压,系统压力在0~21 MPa范围内可调。试验台主要部件的参数型号见表3。

1—Pump; 2—Relief valve; 3—Pressure reducing valve; 4—Loading motor; 9—Actuator hydraulic swing motor; 5 and 8—Angular encoder; 6 and 7—Servo valve; 10—Inertia disc to simulate moment inertia of the control surface; 11—Torque sensor图4 电液负载模拟器结构示意图Fig.4 Schematic diagram of EHLS

表3 试验台主要元件Table 3 Main components of test rig
3.2 实验
多余力抑制能力和动态加载精度是评价负载模拟器性能优劣的关键指标。为了验证改进方案的有效性,共进行4组实验,其中3组多余力矩测试,1组动态加载实验。多余力矩测试是指在舵机主动运动同时,负载模拟器跟踪0加载指令。
实验1舵机作1°,5Hz正弦运动。基于传统速度同步方案的多余力矩实验曲线如图5(a)所示,此时的多余力矩为16 N·m。基于改进方案的多余力矩实验曲线如图5(b)所示,多余力矩减小到12 N·m,和传统的速度同步方案比较,多余力矩降低了25 %。
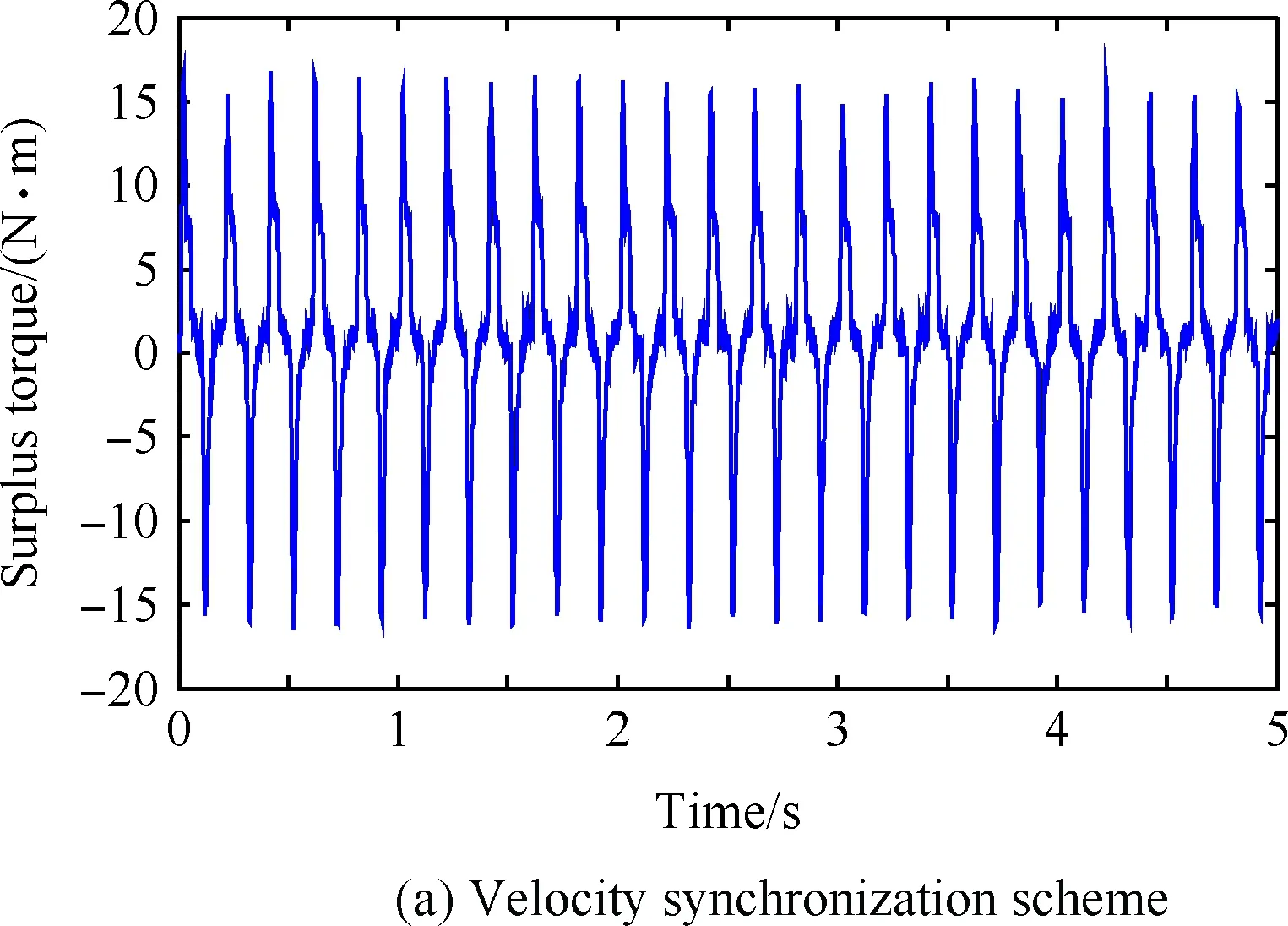
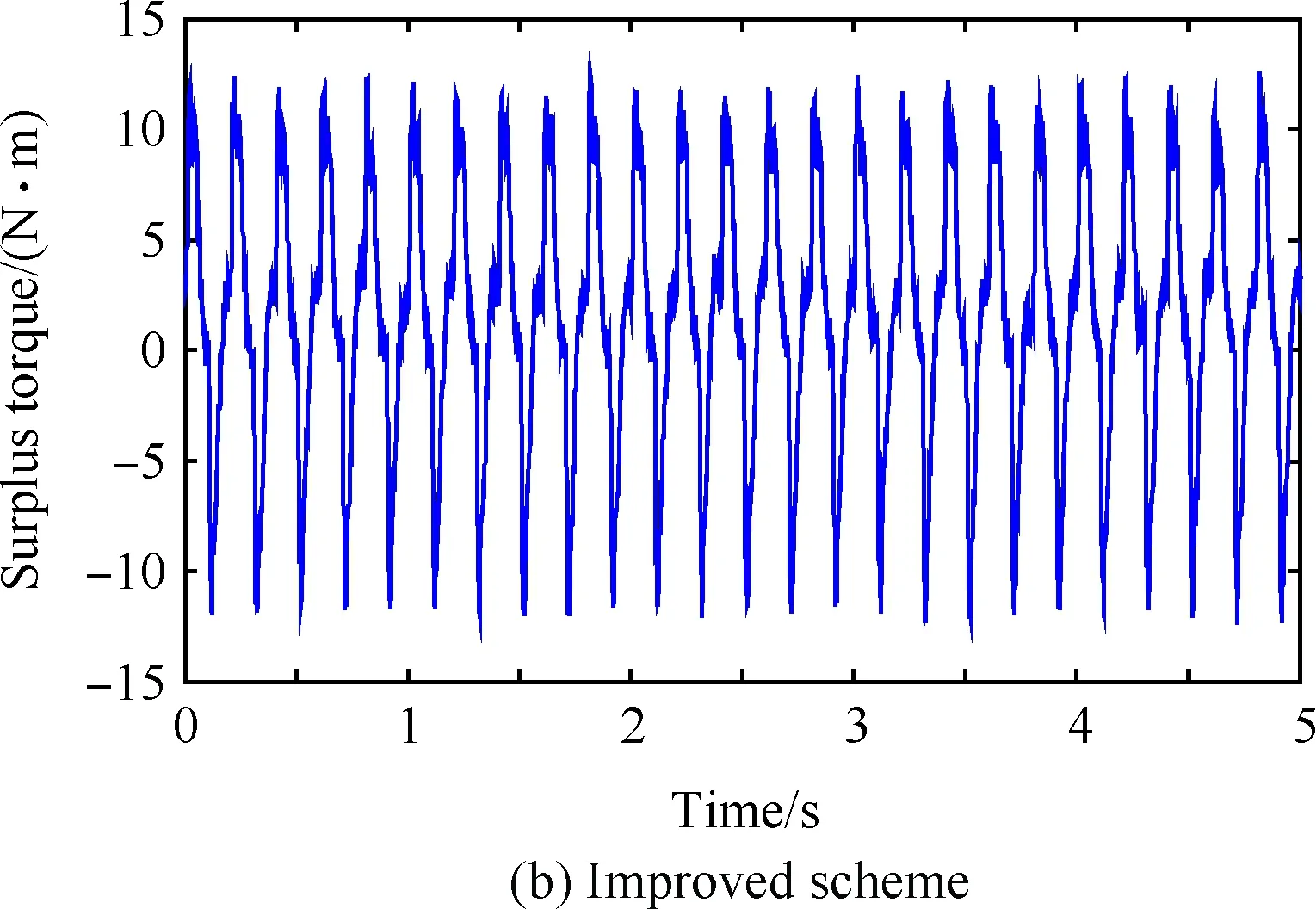
图5 舵机作1°,5 Hz正弦运动时的多余力矩Fig.5 Surplus torque with rudder tracking sinusoid 1°, 5 Hz
实验2舵机作3°,8Hz正弦运动。基于传统速度同步方案的多余力矩实验曲线如图6(a)所示。多余力矩为15 N·m。基于改进方案的多余力矩实验曲线如图6(b)所示,多余力矩减小到11 N·m,较改进前的方案多余力矩降低了27 %。


图6 舵机作3°,8 Hz正弦运动时的多余力矩Fig.6 Surplus torque with rudder tracking sinusoid 3°, 8 Hz
实验3舵机作20°,2 Hz正弦运动。基于速度同步方案的多余力矩实验曲线如图7(a)所示,多余力矩为14.8 N·m。基于改进方案的多余力矩实验曲线如图7(b)所示,多余力矩为10 N·m,较改进前的方案多余力矩降低了32 %。

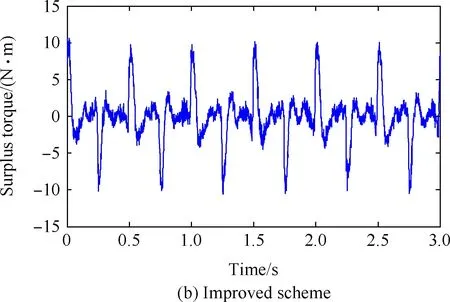
图7 舵机作20°,2 Hz正弦运动时的多余力矩Fig.7 Surplus torque with rudder tracking sinusoid 20°, 2 Hz
实验4动态加载实验。舵机作1°,1 Hz正弦运动,载荷谱指令为幅值50 N·m,频率1 Hz的正弦加载指令。图8是基于改进方案的动态加载曲线,图9是跟踪误差曲线。

图8 舵机1°,1 Hz,加载指令50 N·m,1 Hz动态加载曲线Fig.8 Curves of dynamic loading with rudder tracking 1°, 5 Hz and loading command 50 N·m, 1 Hz
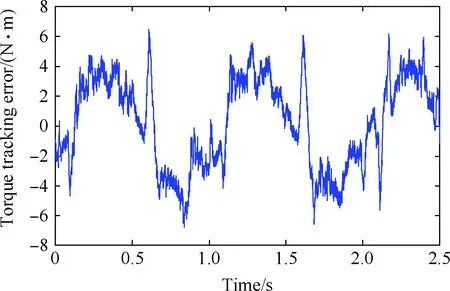
图9 动态加载实验力矩跟踪误差曲线Fig.9 Torque tracking error curves of dynamic loading test
基于改进方案和传统速度同步方案的3组多余力矩实验数据对比结果如图10所示。从实验数据可以看出,随着舵机运动速度的增加,基于改进方案的多余力抑制能力比改进前分别提高了25 %,27 %和32 %。随着舵机运动速度加快,基于改进方案的多余力抑制能力改善愈加显著。实验结果表明:基于改进方案的多余力抑制水平得到显著提高,动态加载精度较理想。
改进的速度同步方案利用舵机和加载系统的速度差进行二次补偿,从物理意义角度出发,改进方案进一步减小了舵机和加载系统二者的速度差。从数学模型角度分析(结合式(26)),舵机和加载系统速度差的减小意味着干扰项λvsθR(s)“强度”的降低,因此基于改进方案取得了更为理想的效果。

图10 多余力矩比较Fig.10 Comparison of surplus torque
4 结 论
1) 多余力速度干扰系数、加速度干扰系数以及加加速度干扰系数可定量分析多余力的“成分”构成。
2) 影响多余力大小的3个因素是舵机速度、加速度、以及加速度变化率。其中舵机速度引起的多余力占主导地位。
3) 加载系统多余力抑制的关键在于速度同步。基于改进的速度同步方法进一步提高了舵机和加载系统的速度同步精度,和传统的速度同步方案比较,加载系统的多余力抑制能力提高25 %以上。
[1] Jiao Z X, Gao J X, Hua Q, et al. The velocity synchronizing control on the electro-hydraulic load simulator. Chinese Journal of Aeronautics, 2004, 17(2): 39-46.
[2] Hua Q. Studies on the key technology of electro-hydraulic load simulator. School of Automation Science and Electric Engineering, Beihang University, 2001. (in Chinese)
华清. 电液负载模拟器关键技术研究. 北京:北京航空航天大学自动化与电气工程学院, 2001.
[3] Li Y H, Development of hybrid control of electro-hydraulic torque load simulator. Journal of Dynamic Systems, Measurement and Control, 2002, 124(3): 415-419.
[4] Yao B, Bu F P, Reedy J, et al. Adaptive robust motion control of signal-rod hydraulic actuators: theory and experiments. IEEE/ASME Transactions on Mechatronics, 2000, 5(1):79-92.
[5] Liu C N. Optimized design theory of hydraulic servo system. Beijing: China Metallurgical Industrial Press, 1989:131-143. (in Chinese)
刘长年. 液压伺服系统优化设计理论. 北京:冶金工业出版社, 1989: 131-143.
[6] Wang J F, Ye Z M, Li H R. Study on eliminating the superfluous force of marine electrohydraulic load simulator applied with dual-valve parallel connected control. Chinese Journal of Mechanical Engineering, 2005, 41(4):229-234. (in Chinese)
王经甫, 叶正茂, 李洪人. 双阀并联控制在船舶舵机电液负载模拟器多余力抑制中的研究. 机械工程学报, 2005,41(4):229-234.
[7] Hao J J, Zhao K D, Xu H G. Application of dual valve in electro hydraulic simulator. China Mechanical Engineering, 2002,13(10):814-816. (in Chinese)
郝经佳, 赵克定, 许宏光. 双阀控制在电液负载仿真台中的应用. 中国机械工程,2002,13(10): 814-816.
[8] Li J Y, Shao J P, Wang Z W, et al. Study of the electro-hydraulic load simulator based on double servo valve concurrent control. Proceedings of 9th International Conference on Electronic Measurement & Instruments, 2009:699-705.
[9] Plummer A R. Robust electro-hydraulic force control. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2007, 221(4):717-733.
[10] Yan J, Sun L, Yang J, et al. Key technology in the development of high performance dynamic airload simulation system. Acta Aeronautica et Astronautica Sincia, 1997, 18(1):22-25. (in Chinese)
阎杰, 孙立, 杨军, 等. 动态负载仿真系统研制中的关键技术问题. 航空学报, 1997, 18(1):22-25.
[11] Yu C Y, Yu X Z, Liu Q H, et al. Effects of shafting stiffness on new air dynamical load simulator. Acta Aeronautica et Astronautica Sincia, 2001, 22(2):148-151. (in Chinese)
于慈远, 于湘珍, 刘庆和, 等. 轴系刚度对新型空气动力负载模拟器的影响. 航空学报, 2001,22(2):148-151.
[12] Wang M Y, Guo B, Wang J L. Analysis of the frequency width affected by inertia and stiffness. Electric Machines and Control, 2004,8(1):71-73.(in Chinese)
王明彦,郭犇,王金梁. 惯量和刚度对电动负载模拟器频宽影响分析. 电机与控制学报,2004,8(1):71-73.
[13] Hao J J, Zhao K D, Xu H G. Study on the inference on the performance of the electro-hydraulic simulator by stiffness and inertia load. China Mechanical Engineering, 2002,13(6):458-461. (in Chinese)
郝经佳, 赵克定, 许宏光. 刚度、惯量负载对电液负载仿真台性能影响的研究. 中国机械工程, 2002, 13(6):458-461.
[14] Zhang L X, Wang A M, Zhou J C. et al. Position synchronization compensation method for widening the bandwidth of aero-load simulator. Journal of Harbin Institute of Technology, 1995, 27(3):123-126. (in Chinese)
张立勋, 王安敏, 周继成, 等. 位置同步补偿提高飞行器负载模拟器频宽的研究. 哈尔滨工业大学学报, 1995, 27(3):123-126.
[15] Wang A M, Zhang L X, Liu Q H, et al. Study on load simulator with new structure. Mechanical Engineer, 1994(6):4-5. (in Chinese)
王安敏, 张立勋, 刘庆和, 等. 新型结构负载模拟器研究. 机械工程师,1994 (6):4-5.
[16] Zhang L X, Meng Q X, Liu Q H, et al. Experimental and theoretic study on eliminating the disturbance torque and widening the frequency band width of the load simulator using position synchro compensation. Journal of Harbin Institute of Technology, 1997,18(1):120-123. (in Chinese)
张立勋, 孟庆鑫, 刘庆和,等. 位置同步补偿克服负载模拟器干扰力矩及提高系统频宽的理论与实验研究. 哈尔滨工业大学学报, 1997,18(1):120-123.
[17] Su D H, Wu S L, Fu X W, et al. Eliminating disturbance torque by angular velocity difference based on synchro-compensation. Journal of Harbin Institute of Technology, 2000,32(1):78-85. (in Chinese)
苏东海, 吴盛林,付兴武, 等. 利用基于同步补偿的角速度差值克服多余力矩. 哈尔滨工业大学学报, 2000,32(1):78-85.
[18] Nam Y, Hong S K. Force control system design for aerodynamic load simulator. Control Engineering Practice, 2002, 10(5):549-558.
[19] Niksefat N. Sepehri N. Design and experimental evaluation of a robust force controller for an electro-hydraulic actuator via quantitative feedback theory. Control Engineering Practice, 2000, 8(12):1335-1345.
[20] Truong D Q, Ahn K K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID. Mechatronics, 2009, 19(2): 233-246.
[21] Truong D Q, Ahn K K, Soo K J, et al. Application of fuzzy-PID controller in hydraulic load simulator. Mechatronics and Automation, 2007, 24(8): 3338-3343.
[22] Jiao Z X, Gao J X, Hua Q, et al. The velocity synchronizing control on the electro-hydraulic load simulator. Chinese Journal of Aeronautics, 2004, 17(1): 39-45.
[23] Shang Y X, Wu S, Jiao Z X, et al, Study on ultimate performance of light-duty electro-hydraulic torque load simulator. Proceedings of 2008 IEEE Conference on Robotics, Automation and Mechatronics, 2008:387-392.
[24] Jiao Z X, Hua Q, Wang X D, et al. Hydraulic control on the electro-hydraulic load simulator. Chinese Journal of Mechanical Engineering, 2002, 38(12):34-38.(in Chinese)
焦宗夏,华清,王晓东,等. 电液负载模拟器的复合控制. 机械工程学报,2002, 38(12): 34-38.
AnImprovedVelocitySynchronizationControlonElectro-hydraulicLoadSimulator
WANGChengwen,JIAOZongxia*,LUOCaijin
ScienceandTechnologyonAircraftControlLaboratory,BeihangUniversity,Beijing100191,China
Theissuesofsurplustorqueinthehardware-in-looploadingsimulationarestudied.Themathematicalmodelofelectro-hydraulicloadingsimulator(EHLS)isbuiltup.Theconceptsofsurplustorquedisturbancecoefficientsareputforwardforthequantitativeanalysisofthecompositionofsurplustorque,anddefinitionmethodforthedisturbancecoefficientsisgiven.Mechanismofsuppressionofthesurplustorquebytraditionalvelocitysynchronizationschemeanditsdrawbackareanalyzed.Animprovedschemebasedonthetraditionalvelocitysynchronizationschemeisproposedwhichusesthevelocityerrorbetweentherudderandloadingsystemtoconductsecondarycompensationforsurplustorque.Effectivenessoftheproposedschemeisprovedbyexperimentalresults.EHLSwiththeproposedschemehasanidealeffectondynamicloading,andtheabilitytosuppresssurplustorqueisimprovedbymorethan25%comparedwiththetraditionalvelocitysynchronizationscheme.
loadsimulator;surplustorque;velocitysynchronization;disturbancecoefficient;synchronousmotors;hardwareintheloopsimulation
2011-12-19;Revised2012-04-26;Accepted2012-05-31;Publishedonline2012-06-211512
URL:www.cnki.net/kcms/detail/11.1929.V.20120621.1512.002.html
NationalScienceFundforDistinguishedYoungScholars(50825502)
.Tel.:010-82338938E-mailzxjiao@buaa.edu.cn
2011-12-19;退修日期2012-04-26;录用日期2012-05-31; < class="emphasis_bold">网络出版时间
时间:2012-06-211512
www.cnki.net/kcms/detail/11.1929.V.20120621.1512.002.html
国家杰出青年科学基金(50825502)
.Tel.:010-82338938E-mailzxjiao@buaa.edu.cn
WangCW,JiaoZX,LuoCJ.Animprovedvelocitysynchronizationcontrolonelectro-hydraulicloadsimulator.ActaAeronauticaetAstronauticaSinica,2012,33(9):1717-1725. 汪成文,焦宗夏,罗才瑾.基于改进的速度同步控制的电液负载模拟器.航空学报,2012,33(9):1717-1725.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
1000-6893(2012)09-1717-09
V242
A
汪成文男, 博士研究生。主要研究方向: 电液伺服控制。
Tel:010-82339238。
E-mail: cwwang@yeah.net
焦宗夏男, 教授, 博士生导师。主要研究方向: 机电系统的数字化、 智能化设计技术, 新型作动系统与余度舵机技术, 机电装备与半实物仿真系统。
Tel: 010-82338938
E-mail: zxjiao@buaa.edu.cn
罗才瑾男, 硕士研究生。主要研究方向: 机电装备与半实物仿真系统。
Tel: 010-82339238
E-mail: luocaijin321@sina.com