基于双捷联算法的POS误差在线标定方法
2012-11-16刘占超房建成
刘占超, 房建成, *
1. 北京航空航天大学 惯性技术重点实验室, 北京 100191 2. 北京航空航天大学 新型惯性仪表与导航系统技术国防重点学科实验室, 北京 100191
基于双捷联算法的POS误差在线标定方法
刘占超1, 2, 房建成1, 2, *
1. 北京航空航天大学 惯性技术重点实验室, 北京 100191 2. 北京航空航天大学 新型惯性仪表与导航系统技术国防重点学科实验室, 北京 100191
为了提升位置和姿态测量系统(POS)的精度,结合POS工作过程中典型的匀速直线运动,提出了一种准实时的POS误差在线标定方法。首先设计了基于双捷联算法的在线标定方案,对系统误差方程进行简化处理,求出中时期导航条件下的系统误差状态转移阵。然后根据POS的两段相邻匀速直线运动导航误差,对系统误差参数进行在线标定,并通过可观测性分析得出POS运动与系统误差在线标定效果之间的对应关系。车载试验和飞行试验结果表明,在POS正常遥感作业过程中,本文提出的在线标定方法能够有效提升系统精度。
航空遥感; 位置和姿态测量系统; 在线标定; 误差模型; 可观测性; 双捷联算法
位置和姿态测量系统(Position and Orientation System, POS)是航空遥感系统的重要组成部分,它由惯性测量单元(Inertial Measurement Unit, IMU)、GPS接收机、数据处理导航计算机和后处理软件等组成。POS通过数据的高精度融合能够实现对航空遥感载荷运动误差的厘米级、亚角分级测量。由于转台标定只能对IMU常值误差进行标定补偿,无法对历次开机误差进行标定[1],而且IMU一般集成于合成孔径雷达、测绘相机等航空遥感载荷内部,不便于拆装,给系统重复标定带来困难,因此如何有效实现系统误差的在线标定是提升POS精度的关键。
POS的运动轨迹是根据载荷的遥感作业需要而事先设计好的。根据合成孔径雷达、激光雷达、高光谱相机等航空遥感载荷的工作原理,载机在成像阶段要保持匀速直线飞行,但由于载机受阵风、气流等影响不可能保持理想的匀速直线飞行,造成一定程度的运动误差,而通过POS测量出非理想匀速直线运动的误差,并在载荷成像时进行误差补偿,能够有效提升遥感载荷的成像质量。
对基于惯性器件的系统来说,通过引入GPS导航结果[2-4]、主系统导航信息[1,5]、磁传感器[6-7]、里程仪[8]等外部信息源,采用先进滤波方法对系统误差进行估计是在线标定的常用方法,也可通过转位机构实现现场多位置标定[9],以及直接进行滤波估计[10-11]等。传递对准过程中通过引入主系统导航信息能够实现子系统误差的在线标定,具有可匹配信息多、误差参数估计全面等优点,但传递对准需要设计特定的飞行机动方案来提升系统可观测度,还要消除参数传递过程中的误差因素,如杆臂误差、安装误差、振动及机翼变形影响等。文献[10]和文献[11]在空中对准过程中通过滤波方法实现对系统误差的在线标定。文献[12]提出了一种在线测量陀螺常值漂移的方法,该方法能够较为有效地测量出所有导航陀螺每次启动后的常值漂移量及其缓慢变化,提升系统精度,但需要有专门的转位机构,能够标定的误差参数不全面。
通过上述分析可以看出,现有方案多数存在滤波算法复杂、计算量大、硬件系统或标定过程复杂、需要特定的飞行机动等问题。文献[13]和文献[14]提出了在静基座上直接对系统误差参数进行辨识的方法。基于以上研究基础,本文给出一种无需额外飞行机动、计算量小、可在遥感作业飞行过程中实现对系统误差参数进行在线标定的方法。
1 总体方案
POS的典型工作过程如图1所示。系统在飞机起飞前通电预热,并进行一定时间的静态测试。静态测试后飞机起飞,在遥感作业区域上空来回做匀速直线运动。任务完成后,飞机返回地面,再完成一定时间的静态测试,整个工作过程结束。

图1 POS典型工作过程Fig.1 Course of typical POS task work
POS的一次典型飞行轨迹如图2所示,飞机起飞后,直接飞向距离机场20~65 km的遥感区域,在距离地面2.6 km的高度平飞,通过来回匀速直线运动进行约1.5 h的遥感作业,之后做机动飞行后返回地面。
基于以上POS的典型工作过程,本文具体方案如图3所示。在POS系统当中设置两套捷联算法,即捷联算法A和捷联算法B。捷联算法A进行正常的惯性/GPS组合导航,捷联算法B作纯惯性导航解算。在线标定过程中,捷联算法A用于捷联算法B的初始化及位置和速度误差计算,捷联算法B用于系统误差在线标定。

图2 POS典型工作轨迹Fig.2 Trajectory of typical POS task work
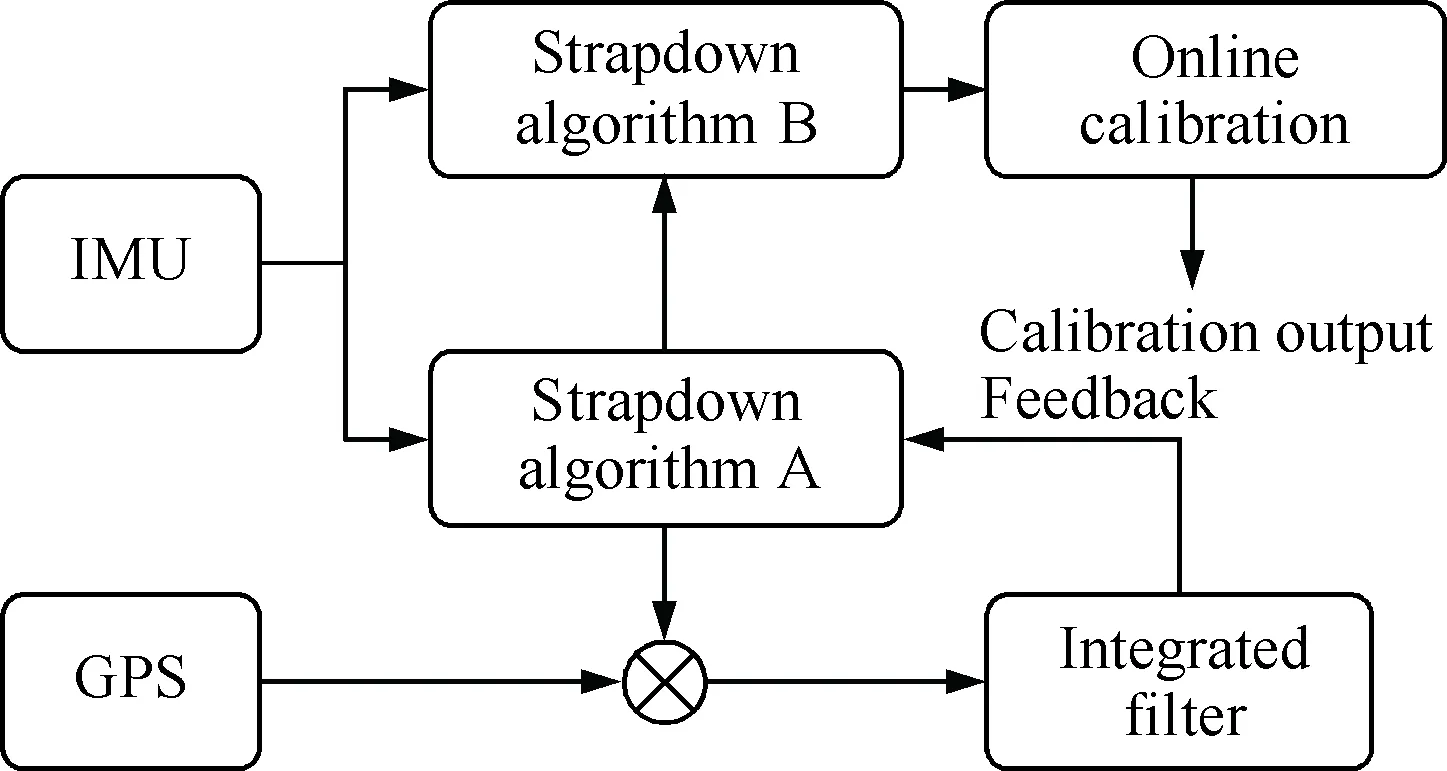
图3 在线标定方案Fig.3 Scheme of online calibration
非匀速直线运动阶段,捷联算法B不工作。在系统进入一段匀速直线运动时,捷联算法B启动,并利用捷联算法A的导航结果进行初始化,然后开始纯惯性导航解算直至该段匀速直线运动过程结束。通过实时地将捷联算法B的导航结果与捷联算法A的导航结果进行比对,可以获得捷联算法B的实时导航误差。由于系统每次匀速直线运动一般能够维持5 min以上,而且在一次匀速直线运动结束后飞机转弯进入下一次匀速直线运动。通过捷联算法B的速度误差输出及导航误差模型,实现对系统误差的在线标定。
2 系统误差模型
系统误差模型包含捷联算法A的误差模型与捷联算法B的误差模型。
捷联算法A的误差模型为常规组合导航误差模型,综合惯导系统速度误差、位置误差和平台失准角误差方程,可得如下系统方程[15]:

(1)
式中:X(t)为状态变量,包括3个平台失准角、3个速度误差、3个位置误差、3个陀螺常值漂移和3个加速度计常值偏置;F(t)为状态矩阵;G(t)为噪声驱动阵;W(t)为系统噪声。
以位置和速度为观测量,系统量测方程为
Z(t)=HX(t)+V(t)
(2)
式中:Z(t)为量测量;H为量测阵;V(t)为量测噪声。
由于捷联算法B的有效工作时间很短,而且其运动过程基本是匀速直线运动,所以可以忽略系统误差传播方程中的傅科周期和地球周期,并对北向、东向两个水平通道的误差传播特性进行单独考虑。首先选取系统导航坐标系为当地东-北-天地理坐标系,载体系为右-前-上坐标系,并假设POS以恒定速度在固定高度上运动,则两个水平通道的误差传播特性可以用下面两组简化后的微分方程来表示[16-17]。
对于北向通道,有以下微分方程成立:
(3)
对于东向通道,有以下微分方程成立:
(4)

以下以东向通道为例进行系统误差传播特性推导。将上述东向通道微分方程写成状态空间形式,假设
(5)
(6)
则有
(7)
对于状态空间方程式(7),其解析解可以用状态转移阵ΦE(t)来表示,即
XE(t)=ΦE(t)XE(0)
(8)
式中:XE(0)为系统东向通道导航初始状态即初始误差大小;状态转移阵ΦE(t)可由式(9)得到。
ΦE(t)=L-1(sI-FE)-1
(9)
式中:s为拉普拉斯算子;L-1为拉普拉斯反变换。求解后,ΦE(t)第3行各元素的表达式为
(10)

(11)
对于北向通道,假设
(12)
进行类似求解后可得北向通道状态转移阵ΦN(t)第3行各元素值如下:
(13)
系统任意时间t的北向通道速度误差为
(14)
式中:XN(0)为系统北向通道导航初始状态即初始误差大小。
从以上分析推导过程可以看出,模型成立条件是载体必须静止或做匀速直线运动,系统陀螺漂移和加速度计偏置在工作过程中稳定,平台初始失准角为小角度。
3 在线标定方案
由第2节得出的系统中时期导航速度误差式(11)和式(14),忽略初始速度误差,可知以下几组误差在传播过程中相互耦合:
{
-vN(1-cos(ωst))φz
R(1-cos(ωst))εN
{
(vE+Rωiecosφ)(1-cos(ωst))φz
-R(1-cos(ωst))εE
由上述各项误差的系数可知,水平失准角与等效加速度计偏置误差随时间同节拍传播,误差不能分离,方位失准角与等效东向和北向陀螺漂移误差随时间同节拍传播,误差不能分离。
在POS设计过程中采用了高精度石英挠性加速度计,其温度补偿后的精度达5 μg,可以忽略其短时间内引起的速度导航误差,实现等效加速度计偏置与平台水平失准角误差之间的解耦。对于天向等效陀螺漂移,由于其随时间传播的阶数较高,短时间内引起的误差较小,在线标定过程中不加以考虑。
通过上述分析和近似处理,在线标定中主要考虑平台失准角误差和水平等效陀螺漂移误差。根据式(11)和式(14),重新定义系统误差状态为
(15)
则有误差传播方程

(16)

由式(10)和式(13)可知,载体速度变化会影响方位失准角的误差传播特性,载体姿态的变化影响捷联安装的水平等效陀螺漂移,所以两段相邻匀速直线运动特性的变化会影响系统误差传播特性,进而影响系统误差可观测性。根据式(16)将两段匀速直线运动的误差传播方程联合,可得
(17)
式中:t1与t2为两段匀速直线运动的导航时间。
矩阵的条件数反映了一个矩阵的结构情况,大的条件数表示矩阵的行向量或列向量独立性弱,利用条件数可以定义系统误差的可观测程度[18-20],本文通过计算式(17)误差方程系数矩阵的条件数随前后两段匀速直线运动航向角之差dH和速度大小之差dV的变化关系来定量描述系统可观测性。需要说明的是,对于整个系统来说,飞行轨迹确定后,系统误差的可观测程度就是确定的,这里讨论的航向角之差dH和速度大小之差dV反映的即是飞行轨迹的变化。
图4表示前后两段匀速直线运动的速度大小相同但航向不同时的误差方程系数矩阵条件数变化,由仿真结果可知,航向角相差180°时系数矩阵的条件数最小,系统误差可观测性最好。图5表示前后两段匀速直线运动速度大小之差与误差方程系数矩阵条件数间的变化关系。由图示结果可知,前后速度之差越大,条件数越小,系统误差可观测性越好。当前后两段匀速直线运动的航向角相差30°以上时,速度之差对系数矩阵条件数的影响不大。

图4 条件数随航向角之差的变化Fig.4 Condition number vs heading difference change
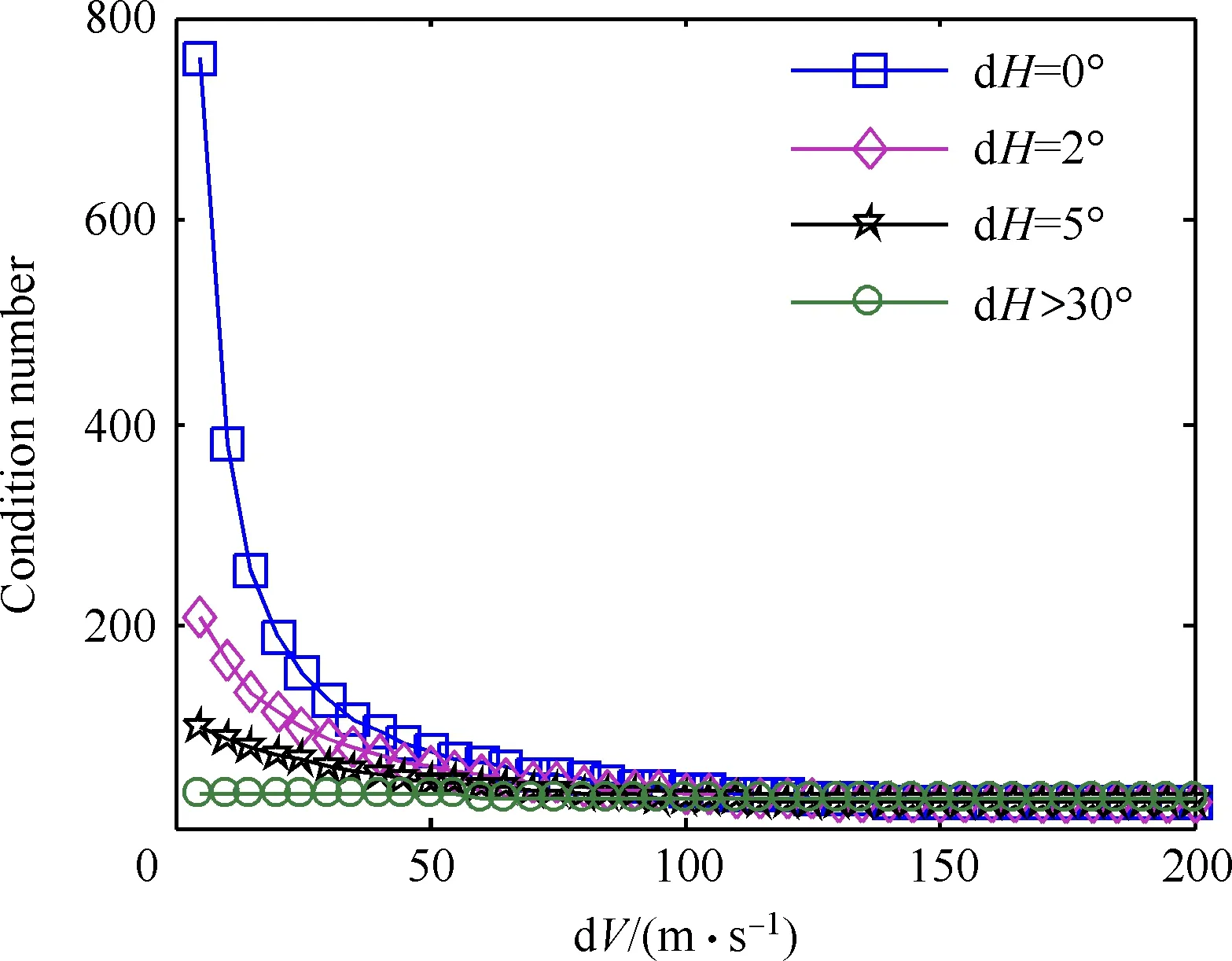
图5 条件数随速度差的变化Fig.5 Condition number vs velocity difference change
根据上述分析,将两段匀速直线运动相结合,参照总体方案所述,在第1段匀速直线运动开始后初始化捷联算法B,并在该匀速直线运动期间计算捷联算法B的速度误差,获得对应导航时长的如式(16)所示的误差方程,在下一段匀速直线运动开始后,重新初始化捷联算法B,并获得另外一组如式(16)所示的误差方程,根据式(17)将对应两段匀速直线运动的误差方程结合,采用最小二乘法对两组误差方程进行联合求解,获得系统误差参数。根据标定出的误差参数进行系统误差补偿的方法与常规组合导航方法相同[11]。
4 试验验证
为说明本文在线标定方案的有效性,以下分别通过地面车载试验和飞行试验数据的在线标定与补偿进行验证。
由于空中没有高精度姿态基准,所以只能采用纯惯性导航位置和速度对时间的误差曲线间接验证系统在线标定精度。试验过程中,捷联算法B作纯惯性导航解算,并实时与捷联算法A的导航结果求差作为捷联算法B的导航误差。通过捷联算法B在线标定前后的速度误差和水平定位误差对比进行在线标定精度评价。
4.1 车载试验
为了模拟POS工作过程中来回做匀速直线运动的典型航迹,在北京市昌平区小汤山镇附近一段长约2.7 km的平直路段进行车载模拟试验。试验过程中保持试验车辆匀速直线行驶5 min以上,然后在路线尽头转弯180°进入下一段匀速直线运动,车辆行驶路线如图6所示。
车载试验POS的陀螺仪是常值漂移为0.1 (°)/h、随机漂移为0.05 (°)/h的光纤陀螺,加速度计偏置和随机误差均在5 μg以内。

图6 车载试验轨迹Fig.6 Vehicle test trajectory
表1为车载试验系统误差参数辨识结果,图7为其中一段匀速直线运动的水平速度输出,其中V1为捷联算法A的水平速度输出,V2为捷联算法B的水平速度输出。图8为捷联算法B的水平速度误差曲线,D1为在线标定前的速度误差,D2为在线标定后的速度误差。系统300 s速度误差由在线标定前的0.13 m/s下降到在线标定后的0.01 m/s。

表1 车载试验在线标定结果Table 1 Online calibration results with vehicle test

图7 车载试验水平速度输出Fig.7 Horizontal velocity output in vehicle test

图8 车载试验中水平速度误差对比(捷联算法B)Fig.8 Comparison of horizontal velocity error in vehicle test (Strapdown algorithm B)
图9为在线标定前后捷联算法B位置误差比较曲线,P1表示未进行在线标定时位置误差随时间的变化,P2表示在线标定后位置误差随时间的变化,图9中系统300 s定位误差由22.4 m下降到6.1 m,且在线标定后的定位误差发散趋势变慢。

图9 车载试验中位置误差对比(捷联算法B)Fig.9 Comparison of position error in vehicle test (Strapdown algorithm B)
4.2 飞行试验
飞行试验载机采用国产Y12飞机,POS的陀螺仪是常值漂移为1 (°)/h、随机漂移为0.5 (°)/h的挠性陀螺,加速度计偏置和随机误差均在5 μg以内。
试验系统如图10所示。图11为载机飞行的平面运动轨迹,L1与L2为用于本文在线标定的两段运动方向几乎相反的匀速直线运动过程。图12为匀速直线运动过程L2段的水平速度输出曲线。

图10 飞行试验用飞机及POSFig.10 Plane and POS in flight test

图11 飞行试验轨迹Fig.11 Flight test trajectory

图12 飞行试验水平速度输出Fig.12 Horizontal velocity output in flight test
表2为飞行试验系统误差参数的辨识结果,图13为捷联算法B的水平速度误差曲线,系统300 s速度误差由在线标定前的1.24 m/s下降到在线标定后的0.04 m/s。
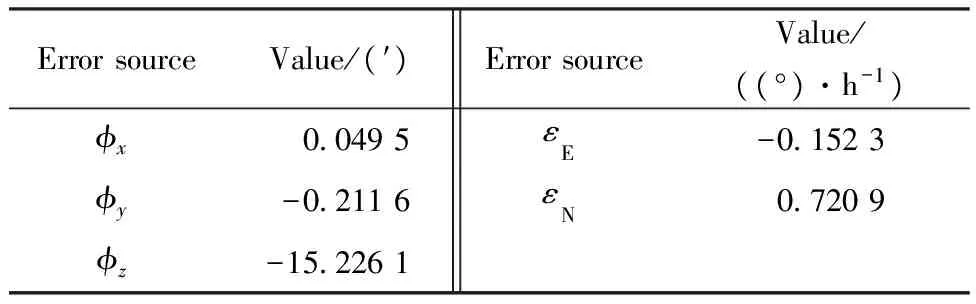
表2 飞行试验在线标定结果Table 2 Online calibration results with flight test

图13 飞行试验中水平速度误差对比(捷联算法B)Fig.13 Comparison of horizontal velocity error in flight test (Strapdown algorithm B)
图14表示在线标定前后的捷联算法B位置误差对比曲线,从图中可以看出,系统300 s定位误差由125.1 m下降到16.1 m,说明本文在线标定方案在POS实际飞行应用当中是有效的。
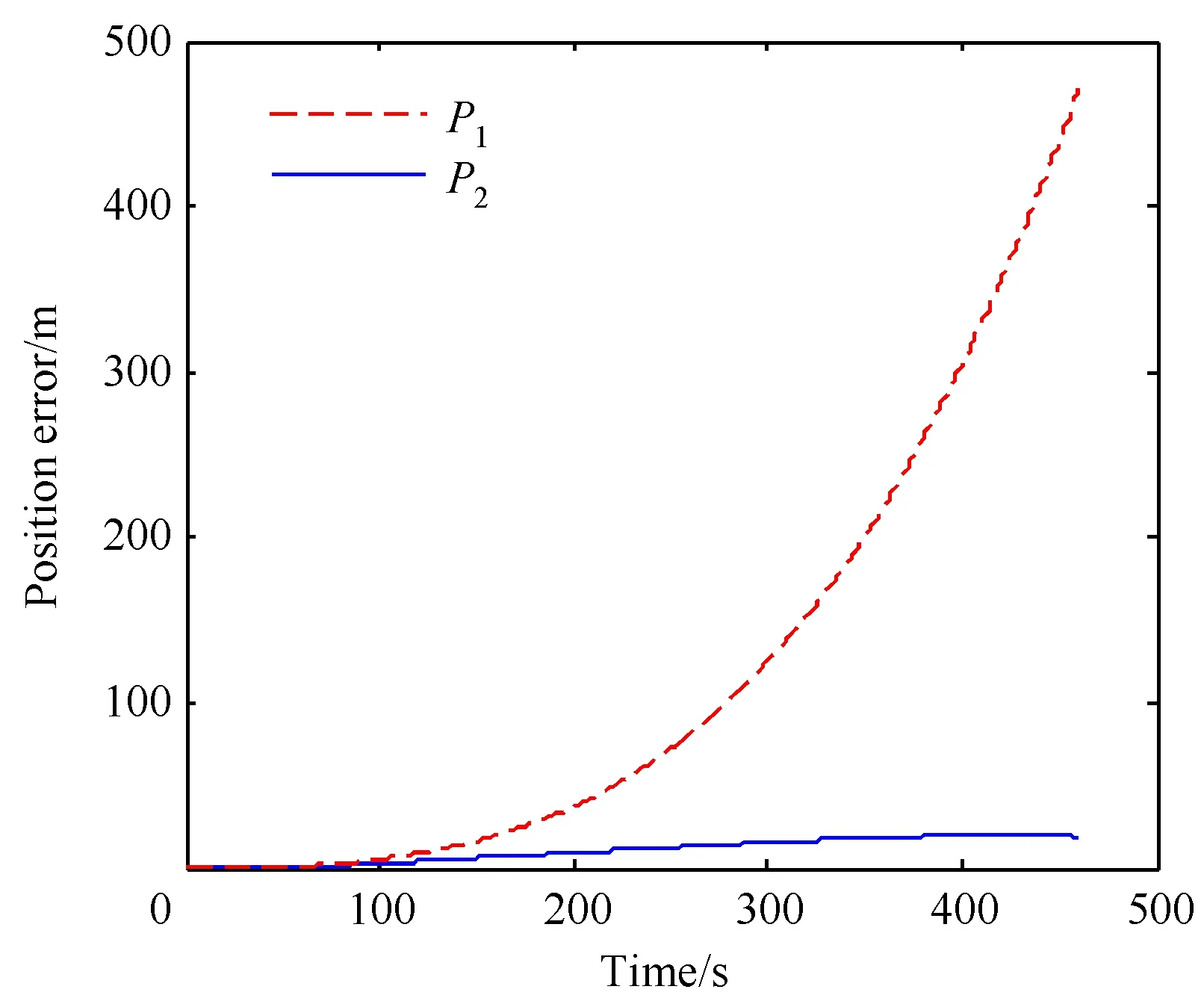
图14 飞行试验中位置误差对比(捷联算法B)Fig.14 Comparison of position error in flight test (Strapdown algorithm B)
上述车载试验和飞行试验结果表明,本文在线标定方案在紧密结合POS典型匀速直线运动过程的基础上,有效提升了系统精度。
由于本文在线标定的速度误差中包含了捷联算法A的误差,而且理想的匀速直线运动并不存在,所以本文在线标定的精度比考虑了噪声特性的卡尔曼滤波等组合导航方法的标定精度略差。
5 结 论
1) 通过对系统误差模型进行简化,结合POS典型工作轨迹进行在线标定,是一种有效提升POS精度的手段,车载试验和飞行试验结果验证了本文在线标定方案的有效性。
2) 本文在线标定方案算法简单,计算量小,而且具有准实时性,可在POS正常遥感作业过程中实现误差在线标定,适合于工程应用。
3) 由于POS的匀速直线运动并不是理想的,进而导致简化误差模型成立的条件不完全满足,但本文在线标定方案能够取得一定效果,说明非理想匀速直线运动导致的模型误差是可以接受的。
[1] Zhang X Y, Zhang C X, Song N F. Online calibration of FOG strapdown system based on integrated navigation technology. Acta Aeronautica et Astronautica Sinica, 2008, 29(6): 1656-1659. (in Chinese)
张小跃, 张春熹, 宋凝芳. 基于组合导航技术的光纤捷联系统在线标定. 航空学报, 2008, 29(6): 1656-1659.
[2] Crassidis J L. Survey of nonlinear attitude estimation methods. Journal of Guidance, Control, and Dynamics, 2007, 30(1): 12-28.
[3] Lu Z D, Wang L. In-flight calibration method for SINS. Journal of Chinese Inertial Technology, 2007, 15(2): 136-138. (in Chinese)
陆志东, 王磊. 捷联惯导系统的空中标定方法. 中国惯性技术学报, 2007, 15(2): 136-138.
[4] Zhou F, Meng X Y. In-flight alignment research for airborne INS/GPS based on adaptive unscented Kalman filter algorithm. Systems Engineering and Electronics, 2010, 32(2): 367-371. (in Chinese)
周峰,孟秀云. 基于自适应UKF 算法的机载INS/GPS空中对准研究. 系统工程与电子技术, 2010, 32(2): 367-371.
[5] Chen P, Lei H J. Flight test analysis of an improved transfer alignment for missile strapdown inertial guidance system. Journal of Chinese Inertial Technology, 2007, 15(1): 9-11. (in Chinese)
阵璞, 雷宏杰. 弹载捷联惯性制导系统传递对准技术试飞验证. 中国惯性技术学报, 2007, 15(1): 9-11.
[6] Lai K L, Crassidis J L, Harman R R. Real-time attitude-independent gyro calibration from three-axis magnetometer measurements. AIAA-2004-4855, 2004.
[7] Qin W, Yuan W Z, Chang H L, et al. In-flight on-line calibration method for MEMS gyroscope based on adaptive unscented Kalman filter algorithm. Journal of Chinese Inertial Technology, 2011, 19(2): 170-174. (in Chinese)
秦伟, 苑伟政,常洪龙, 等. 基于自适应UKF算法的MEMS陀螺空中在线标定技术. 中国惯性技术学报, 2011, 19(2): 170-174.
[8] Wei Y X, Bai J Q. Method of vehicular SINS/DR integrated navigation system’s on-line calibration. Journal of Chinese Inertial Technology, 2009, 17(6): 651-653. (in Chinese)
卫育新, 白俊卿. 车载SINS/DR 组合导航系统的在线标定方法. 中国惯性技术学报, 2009, 17(6): 651-653.
[9] Qian W X, Liu J Y, Zhao W, et al. SINS initial alignment based on revolving base. Journal of Astronautics, 2008, 29(3): 928-932. (in Chinese)
钱伟行, 刘建业, 赵伟, 等. 基于转动基座的SINS初始对准方法研究. 宇航学报, 2008, 29(3): 928-932.
[10] Cao J J, Fang J C, Sheng W. A fast in-flight alignment method for MIMU under large attitude errors. Acta Aeronautica et Astronautica Sinica, 2007, 28(6): 1395-1400. (in Chinese)
曹娟娟, 房建成, 盛蔚. 大失准角下MIMU空中快速对准技术. 航空学报, 2007, 28(6): 1395-1400.
[11] Zhang X Y, Yang G L, Zhang C X. Online calibration based on in-flight alignment and optimal design. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(2): 220-222. (in Chinese)
张小跃, 杨功流, 张春熹. 基于空中对准过程的在线标定及优化设计. 北京航空航天大学学报, 2011, 37(2): 220-222.
[12] Gong X L, Fang J C. Improved method for measuring gyro constant drift online in SINS. Chinese Journal of Scientific Instrument, 2011, 32(4): 756-762. (in Chinese)
宫晓琳, 房建成. 一种改进的在线测量SINS陀螺常值漂移的方法. 仪器仪表学报, 2011, 32(4): 756-762.
[13] Qin Y Y. Inertia navigation. Beijing: Science Press, 2006: 363-373. (in Chinese)
秦永元. 惯性导航. 北京: 科学出版社, 2006: 363-373.
[14] Zhao C S, Qin Y Y, Zhou Q. Modified two-position parameter identification alignment method. Journal of Chinese Inertial Technology, 2009, 17(6): 631-635. (in Chinese)
赵长山, 秦永元, 周琪. 参数辨识双位置对准改进算法. 中国惯性技术学报, 2009, 17(6): 631-635.
[15] Xu F, Fang J C. Velocity and position error compensation using SINS/star integration based on evaluation of transition matrix. Aerospace Control, 2007, 25(6): 27-35. (in Chinese)
徐帆, 房建成. 基于状态转移阵的SINS/星光组合速度位置误差估计方法. 航天控制, 2007, 25(6): 27-35.
[16] Rogers R M. Applied mathematics in integrated navigation systems. 3rd ed. Reston: American Institude of Aeronautics and Astronautics, Inc., 2007: 101-120.
[17] Titterton D H, Weston J L. Strapdown inertial navigation technology. 2nd ed. London: Peter Peregrinus Ltd., 2004: 335-375.
[18] Gao S S, Wang H W, Ni L Q. Application of local observability theory in rapid transfer alignment of INS. Journal of Chinese Inertial Technology, 2007, 15(6): 642-645. (in Chinese)
高社生, 王海维, 倪龙强. 局部可观测理论在惯导系统快速传递对准中的应用. 中国惯性技术学报, 2007, 15(6): 642-645.
[19] Yu J C, Chen J B, Xu X Q, et al. Multiposition observability analysis of strapdown inertial navigation system. Transactions of Beijing Institute of Technology, 2004, 24(2): 150-153. (in Chinese)
于家成, 陈家斌, 徐学强, 等. 捷联惯导系统多位置可观性分析. 北京理工大学学报, 2004, 24(2): 150-153.
[20] Tang Y G, Wu Y X, Wu M P. INS/GPS integration: global observability analysis. IEEE Transactions on Vehicular Technology, 2009, 58(3): 1129-1142.
OnlineCalibrationofPOSErrorBasedonDoubleStrapdownAlgorithm
LIUZhanchao1, 2,FANGJiancheng1, 2, *
1.Science&TechnologyonInertialLaboratory,BeihangUniversity,Beijing100191,China2.KeyLaboratoryofFundamentalScienceforNationalDefense-NovelInertialInstrument&NavigationSystemTechnology,BeihangUniversity,Beijing100191,China
Inordertoimprovetheperformanceofpositionandorientationsystem(POS),anewonlinecalibrationmethodisproposedbasedonthetypicaluniformrectilinearmotionofPOS.First,anonlinecalibrationschemebasedondoublestrapdownalgorithmisdesigned,andthesimplifiedsystemerrormodelisintroduced.Thenthesystemerrorstatetransfermatrixisderivedundermediumtermnavigationconditions.Subsequently,onlinecalibrationofsystemerrorparametersiscarriedoutaccordingtotheneighborhooduniformrectilinearmotionnavigationerrorofPOS,andthroughtheobservabilityanalysisofsystemerrorstates,thecorrespondingrelationshipbetweenPOSmotionandonlinecalibrationprecisionisestablished.VehicletestandflighttestresultsshowthatthenewonlinecalibrationmethodproposedinthispapercaneffectivelyimprovesystemaccuracyduringthenormalremotesensingtaskofPOS.
airborneremotesensing;positionandorientationsystem;onlinecalibration;errormodel;observability;doublestrapdownalgorithm
2011-11-16;Revised2012-01-20;Accepted2012-03-14;Publishedonline2012-03-221644
URL:www.cnki.net/kcms/detail/11.1929.V.20120322.1644.003.html
s:NationalBasicResearchProgramofChina(2009CB724002);NationalScienceFundforDistinguishedYoungScholars(60825305);FoundationforInnovativeResearchGroupsoftheNationalNaturalScienceFoundationofChina(61121003)
.Tel.:010-82339487E-mailfangjiancheng@buaa.edu.cn
2011-11-16;退修日期2012-01-20;录用日期2012-03-14; < class="emphasis_bold">网络出版时间
时间:2012-03-221644
www.cnki.net/kcms/detail/11.1929.V.20120322.1644.003.html
国家“973”计划(2009CB724002);国家杰出青年科学基金(60825305);国家自然科学基金创新研究群体科学基金(61121003)
.Tel.:010-82339487E-mailfangjiancheng@buaa.edu.cn
LiuZC,FangJC.OnlinecalibrationofPOSerrorbasedondoublestrapdownalgorithm.ActaAeronauticaetAstronauticaSinica,2012,32(9):1679-1687. 刘占超,房建成.基于双捷联算法的POS误差在线标定方法.航空学报,2012,32(9):1679-1687.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
1000-6893(2012)09-1679-09
V243.5
A
刘占超男, 博士研究生。主要研究方向: 惯性导航与组合导航技术。
Tel: 010-82339550
E-mail: liuzhanchao@aspe.buaa.edu.cn
房建成男, 博士, 教授, 博士生导师。主要研究方向: 惯性技术、 组合导航及航天器姿态控制技术。
Tel: 010-82339487
E-mail: fangjiancheng@buaa.edu.cn