列车转向架运行姿态检测系统的研究
2012-11-15张昭英陈建政
张昭英,陈建政
(西南交通大学牵引动力国家重点实验室,四川 成都 610031)
0 引 言
列车的高速行驶,对列车运行安全性及舒适性有更高的要求,提高转向架横向运动的稳定性与改善转向架曲线通过性能往往是互相矛盾的;同时,机车车辆沿直线轨道运行时,在某种速度要求下要产生特有剧烈地蛇形运动,它威胁到列车运行的安全与平稳[1]。对转向架进行在线的运行轨迹检测,在不影响转向架运行的情况下,保证列车高速运行时的安全与平稳非常重要。
惯性导航系统建立在牛顿经典力学定律的基础之上,使用推算法,用陀螺仪和加速度计提供的测量数据确定所在运载体的位置及姿态。微机电系统的快速发展和计算机的优异性能激发了很多新的应用领域。
1 捷联惯性导航技术基本原理
1.1 参考坐标系
本文用到的坐标系如下[2]:
惯性坐标系(i系):用Oxiyizi表示,原点位于地球中心,坐标轴相对恒星无转动;
地球坐标系(e系):用Oxeyeze表示,原点位于地球中心,坐标轴与地球固连;
导航坐标系(n系):用Oxnynzn表示,原点位于导航系统所处的位置P点,坐标轴指向北、东和当地垂线方向(向上);
载体坐标系(b系):用Oxbybzb表示,原点为载体重心,xb轴沿载体横轴向右,yb轴沿载体纵轴向前,zb轴沿载体立轴向上。
1.2 当地地理导航坐标系机械编排
长距离监控需要考虑地球自转和导航坐标系相对于地球坐标系的转动。νen表示运载体相对于地球的速度在当地地理坐标系中的值,其变化率[3-4]为

当式(1)表示在导航坐标系中时,则

式中:fb——加速度计提供的载体坐标系中比力的测量值;
这个矩阵的传递依据为



导航系机械编排的框图如图1所示。
1.3 捷联姿态表达式
载体相对于参考坐标系的姿态可用不同的数学表达式来定义。本文采用方向余弦法与四元数法、欧拉角法相结合进行姿态更新。

四元数法[6-7]的思路是:一个坐标系到另一个坐标系的变换可以通过绕一个定义在参考坐标系中的矢量的单次转动来实现。四元数用符号q表示,其形式为


图1 导航坐标系机械编排框图
方向余弦阵可以用四元数表示为

欧拉角法[8]的思路是:一个坐标系到另一个坐标系的变换,可通过绕不同的坐标轴的3次连续转动来实现,分别用 θ、γ、φ 表示绕参考坐标系的 x、y、z轴的转动角,即点头角、横滚角与摇头角。用欧拉角表示四元数为

由方向余弦推导出欧拉角

四元数法只需求解4个联立微分方程,计算量比方向余弦法小,且算法简单,易于实现。本文采用四元数法进行时间传递,代入式(7),得出方向余弦阵,再代入式(2)、式(4)和式(9),得出姿态角与速度等导航信息。四元数随时间的传递[9-10]为


图2 模拟试验车
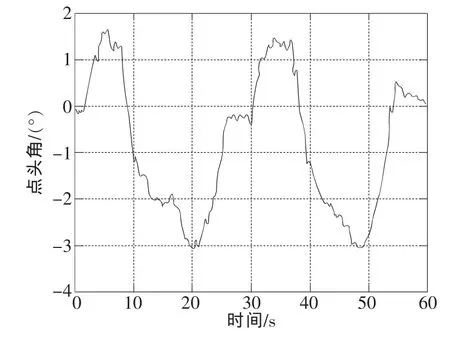
图3 点头角变化曲线图

图4 横滚角变化曲线图
2 在模拟试验车上的验证
为验证算法正确性,引入模拟试验车进行试验。如图2所示,模拟试验车是按照1∶3比例设计制作,该车运行时速为10km左右,整个车由转向架、牵引电机、控制系统、接触网、受电弓和轨道等组成。轨道为椭圆环形,内环短轴为7.22 m,长轴为13.7 m;外环短轴为7.79m,长轴为14.27m。
在模拟试验车转向架上安装带有6自由度惯性传感器ADISI16360的采集板进行数据采集,绕轨道正向运行两圈并采集数据,导入用Matlab编写的程序计算并绘出转向架点头角、横滚角及摇头角变化曲线图,如图3~图5所示。

图5 摇头角变化曲线图
由图3~图5可以得出:点头角范围在-3.1°~1.7°之间;模型车绕椭圆轨道正向运行,由于向心力的影响,横滚角更偏向负值,其范围在-4.7°~1°之间;模型车的圆周运动使得绕z轴的摇头角范围在0°~360°之间,根据跳轨脱轨判别准则和动态脱轨判别准则[11],并结合轨道性状,解算出的姿态角均在合理范围内。
3 结束语
本文研究捷联惯性导航技术的基本原理及算法,将广泛运用于航空及航海的捷联惯性导航技术,通过算法分析及转换,采用六自由度惯性传感器测量转向架三维角速度及加速度,导入Matlab编写的算法程序,得出其运行姿态。该算法可为判断其运行稳定性,并结合线路状态和其他检测参数对车辆运行状态进行评估提供依据。
[1]王福天.车辆动力学[M].北京:中国铁道出版社,1981.
[2]蒋黎星.捷联惯性导航算法及半实物仿真系统研究[D].南京理工大学,2007.
[3]Titterton D H,Weston J L.Strapdown interial navigation echnology[M].Stevenage:The Instotutvon of Engineering and Technology,2004.
[4]江树生.捷联惯性导航系统中陀螺仪信号的数据采集及处理技术研究[D].哈尔滨:哈尔滨工程大学,2002.
[5]李振.惯性导航定位系统数据处理技术的研究[D].南京:南京理工大学,2007.
[6]吴军,鲍其莲.高精度捷联惯导姿态更新优化算法研究[J].电子测量技术,2010,33(2):49-52.
[7]张春慧.高精度捷联式惯性导航系统算法研究[D].哈尔滨:哈尔滨工程大学,2005.
[8]杨敏.小型捷联惯性导航系统研究[D].长沙:中南大学,2010.
[9]郭访社,于云峰,郝福建,等.捷联惯性导航系统姿态算法研究[J].航天控制,2010,28(1):37-39.
[10]杨菁,陈建政,任愈.采用惯性捷联算法的电梯运行轨迹检测方案[J].中国测试,2009,35(4):100-103.
[11]关庆华.列车脱轨机理及运行安全性研究[D].成都:西南交通大学,2010.
