基于哈特曼传感器的激光波前分布测量技术
2012-11-15王国星
王国星,马 冲
(1.中北大学机电工程学院,山西 太原 030051;2.中国计量科学研究院,北京 100013)
0 引 言
随着激光应用在工业制造、光通信、医疗及军事领域的扩大和深入,激光参数的计量需求在原有的激光功率、激光能量、激光波长基础上,扩展至用于表述激光光束质量的空域参数[1-3]。2003年ISO 15367-1将激光波前分布列入了继激光光束直径、发散角之后用于表述激光传输特性和衡量光束质量的激光空域参数[4]之中。本文介绍了一种目前常用的波前分布测量技术,即基于哈特曼传感器的哈特曼波前分布测量技术。在对该项技术测量原理、测量装置、测量过程进行阐述的基础上,重点引入一种对哈特曼传感器中关键参数定标的方法,进一步保证了哈特曼激光波前分布测量的准确性和可靠性。
1 哈特曼激光波前分布测量原理
哈特曼激光波前分布测量装置如图1所示。激光源出射光束入射至哈特曼波前分析仪,哈特曼传感器测量到通过针孔阵列落入CCD的像点的功率密度分布。数据采集分析系统在完成前期的CCD参数设置、CCD子区域划分、背景噪声的去除等任务后,接收到哈特曼传感器分别对参考波前与被测波前采集的功率密度分布数据组,根据该数据确定参考波面与被测波前在各CCD子区域内像点的质心位置,进一步算出质心偏移量,得出波面在空间采样点处斜率,最终通过算法重构波前。

图1 哈特曼波前分布测量装置组成框图
1.1 波前斜率测量
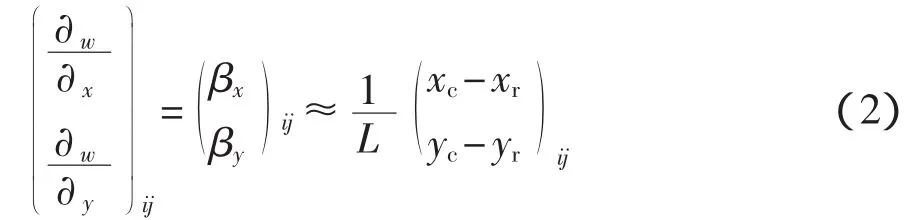
基于哈特曼传感器的哈特曼波前分析仪的基本特点是,将入射激光波前测量转化为对激光波前空间采样点的波前斜率的测量。图2显示了参考波前和被测波前分别入射哈特曼传感器时,落入CCD子区域内的像点及像点质心位置的偏移量。参考波前测量时,CCD子区域(i,j)内质心位置(xr,yr)i,j由经背景校正的像点功率密度分布E′(x,y)一阶矩计算[5],如式(1)所示。
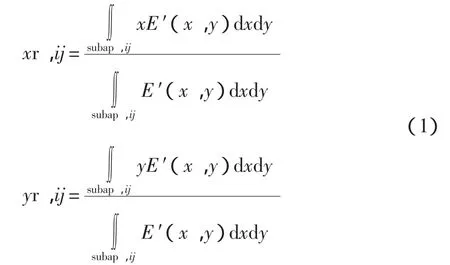
被测波前测量时,用同样的方法计算出被测波前像点的质心位置(xc,yc)i,j。各空间采样点波面的斜率(βx,βy)i,j,可以通过被测像点质心位置(xc,yc)i,j相对于参考像点质心位置(xr,yr)i,j的偏移量,除以针孔阵列与CCD阵列的间距L计算得出,如式(2)所示。
1.2 波前重构
上述方法测量的波前斜率数据作为已知数据,通过软件算法重构波前。常用的波前重构算法有线性积分法和模式法[5]。线性积分法的波前重构从CCD阵列上下或左右某一边际开始,初始区域波前高度为0,沿着扫描方向下一个相邻积分区域的波前高度等于前一区域的波前高度加上前一积分区域的斜率与针孔间距的乘积,可用式(3)表示[6],其中d为针孔间距。联立方程组,求其最小二乘解,得出整个被测区域的波前值。

图2 基于哈特曼传感器的波前斜率测量示意图

模式法波前重构是通过某一多项式序列表示波前,如常用的Zernike多项式,见式(4),其中Pk(x,y)为多项式的k次项,K为重构使用的多项式的次数,又称模式数,多项式系数{ak}可通过已知斜率数据(βx,βy)i,j求出[6],见式(5)。

2 哈特曼波前分析仪针孔阵列与CCD间距的定标实验
从式(2)可看出,波前的斜率不仅与哈特曼传感器测得的质心偏移量有关,还与针孔阵列与CCD间距L有关。但针孔阵列与CCD机械安装固定后,L是无法用常规长度计量方法测出;因此,针孔阵列与CCD间距的定标很重要,其值直接影响着波前斜率的准确性。
2.1 定标实验装置及过程
针孔阵列与CCD间距定标的装置如图3所示。氦氖激光器输出激光束经光纤耦合器至单模光纤,光纤输出点光源,点光源输出为理想球面波,点光源放置在透镜焦平面上输出平面波,平面波作为参考波前,球面波作为被测波前用于定标针孔阵列与CCD 间距 L[7]。
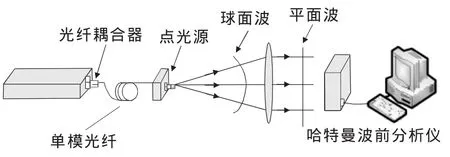
图3 针孔阵列与CCD间距定标装置示意图
定标的基本原理是,当球面波入射哈特曼传感器时,在CCD探测器面上球面波顶点沿x轴(或y轴)切线方向所成像点间隔相等,间隔Q为

式中:d——针孔间距,为已知参数;
R——球面波的曲率半径,可以通过长度测量方法得知;
Q——像点间隔,可通过哈特曼传感器测得;
L——针孔阵列与CCD阵列的间距。
此外,定标实验中要求入射波面倾斜角尽量小,但点光源出射的球面波无法实现准直调光,为此在原有光路即激光器1、点光源、哈特曼传感器的垂直方向上增加了激光器2、半透半反镜、全反镜等辅助装置,以实现点光源出射球面波法线方向与哈特曼传感器探测面垂直,并尽量入射在中心位置,如图4所示。

图4 光路准直装置示意图
2.2 定标实验结果及波前分布测量结果
沿光轴移动哈特曼传感器,分别在点光源到哈特曼传感器探测面间距,即球面波曲率半径为2 000,1410,910,710及510mm 5个位置,按2.1中定标方法求出针孔阵列与CCD阵列的间距,实验数据如图5所示。取5点定标值的平均值6.67mm作为哈特曼传感器针孔阵列与CCD阵列这一特定参数的取值。该值将在激光波前分布测量时参与波前斜率的计算,定标数据的标准偏差0.8%计入激光波前分布测量不确定度评定中。
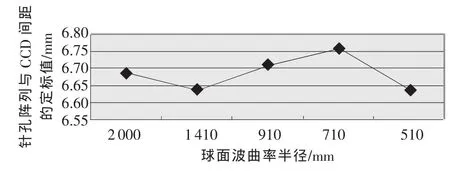
图5 针孔阵列与CCD间距标定实验数据
使用已定标的哈特曼波前分析仪测量激光波前分布,如图6所示[8-9]。该次测量的波前测量准确度为1/35λ,波前余差等值线图如7所示。从实验结果中可看出,通过2.1方法定标的哈特曼波前分析仪测量激光波前分布准确度很高,该定标方法准确可靠。

图6 激光波前分布3D图

图7 波前的余差等值线图
3 结束语
哈特曼激光波前分布测量技术具有宽动态范围、部分相干光束适用、可分辨2π整数倍的相位信息及适合单脉冲激光波前测量等优势,是目前最常见的激光波前分布测量技术,哈特曼波前分析仪的商业化程度也远远高于其他波前测量仪器。从事激光波前分布测量的检测人员需要重点掌握哈特曼波前分析仪的工作原理和测量过程。更需注意的是,哈特曼传感器中针孔阵列与CCD的间距需要准确定标。此外,在研制和使用哈特曼传感器时,应注意该参数与哈特曼传感器波前斜率测量的动态范围和灵敏度的关系:针孔阵列与CCD间距大,波前斜率测量的动态范围小,但波前斜率测量的灵敏度大;反之,针孔阵列与CCD间距小,波前斜率测量的动态范围大,但波前斜率测量的灵敏度小。
[1]姜汉文.哈特曼传感器的应用[J].量子电子学报,1998(2):226-228.
[2]Alexandrov A.Adaptive system for laser beam formation[C]∥SPIE,2002(4770):59-62.
[3]王先培.哈特曼波前传感器质心探测误差分析[J].计量与测试技术,2010,37(9):29-30.
[4]ISO 15367-1:2003.Lasers and laser-related equipment-Test methods for determination of the shape of a laser beam wavefront-part1:Terminology and fundamental aspects[s].
[5]ISO 15367-2:2005.Lasers and laser-related equipment-Test methods for determination of the shape of a laser beam wavefront-part2:Shack-Hartmann sensors[s].
[6]Chernyshov A,Sterr U.Calibration of a shack-hartmann sensor for absolute measurements of wavefronts[J].Applied Optics,2005,44(2):6419-6425.
[7]周仁忠,阎吉祥.自适应光学理论[M].北京:北京理工大学出版社,1996:79-83.
[8]刘君华.虚拟仪器图形化编程语言LabVIEW教程[M].西安:西安电子科技大学出版社,2001:28-53.
[9]张志涌.Matlab教程[M].北京:北京航空航天大学出版社,2010:108-112.
