铁塔单目视觉测量技术研究
2012-11-14冯砚厅申军辉艾增栋
冯砚厅,申军辉,艾增栋
(1.河北省电力公司电力科学研究院,石家庄 050021;2.石家庄高新区华昊工程技术服务有限公司,石家庄 050041;3.河北西柏坡发电有限责任公司,石家庄 050400)
铁塔在安装后、运行过程中,易发生倾斜、弯曲、扭曲等变形,当变形超过标准允许值时,需要对铁塔进行处理,否则有可能在恶劣的天气等因素的作用下发生倒塔事故。目前铁塔测量均采用全站仪、经纬仪或是上塔吊线等测量方法进行测量。但这些方法测量速度较慢,容易受到带电、天气等的影响导致无法完成测量,且测量得到的数据信息少,不能同时对所有的杆件进行测量。以下介绍一种新的测量技术——视觉测量,及其在铁塔测量中的应用。
1 单目视觉测量技术
视觉测量是在计算机视觉研究基础上的一门新兴检测技术,因其测量速度快而广泛用于工业、国防等领域。视觉测量技术按视觉传感器的数量分为单目视觉测量、双目视觉测量、多目视觉测量等。单目视觉测量仅利用一台数码相机拍摄单张照片来进行测量工作,只需对铁塔进行一次性拍照,然后在办公室内进行图像计算和处理,即可实现铁塔的测量目的。因其结构简单、标定方便,同时还避免了立体视觉中的视场小、立体匹配难的不足,因而得到广泛的研究和应用[1]。单目视觉测量的方法一般有几何相似法测量、几何形状约束法测量、结构光法测量、几何光学法测量、辅助测量棒法测量、激光辅助测距法测量等。
a. 几何相似法是在放大倍数已知的条件下采用几何相似的原理进行测量,其缺点是放大倍数过大影响测量精度,放大倍数过小增加测量难度。
b. 几何形状约束法是利用被测物体具有特征几何形状进行测量,缺点是过于依赖规则的形状,对变形物体的测量有困难。
c. 结构光测量法是利用激光源产生点、线、面的结构光投射到被测量物体上,根据CCD成像位置和结构光源的位置计算出物体的坐标。其缺点是需要结构光源,对输电铁塔等大型结构及行架结构的物体有困难。
d. 几何光学法测量是利用透镜的成像原理,通过聚焦法和离焦法测得物距进行测量。其缺点是像距和焦距是已知的,而离焦法又需要准确标定离焦模型,实现准确标定是困难的。
e. 辅助测量棒法是采用3个已知点的测量棒,通过将测量棒的控制点放置于待侧位置,然后进行拍照,通过坐标变换得到被测量点的坐标。其缺点是必须将测量棒放置于被测量点上。无法应用到大型且运行中的输电铁塔上。
2 铁塔单目视觉测量技术
视觉测量均需通过相机的标定来减小图像的畸变,方法是采用平均的黑白块标准板(块)的实际尺寸和像片尺寸对比求出比例关系进行标定[5-7]。由于标定的条件是在一定距离、焦距和范围内进行的,因此通常视觉测量只适用于室内,对于空间行架结构的铁塔,由于仰角大、照相距离不定、照相角度不定、高度高等原因,通常的视觉测量方法无法满足测量要求。
关于大型物体的视觉测量研究工作也有一定的进展,参考文献[2]对空间目标的单目视觉测量技术进行了研究,主要内容是通过卫星估计目标的位置,不符合铁塔测量的要求。参考文献[3]通过已知面积和投影面积的比可以求出目标距离,这种方法可以通过在铁塔根部设置标记物测量照相位置和铁塔的距离,但需要知道标记物和所要测量位置的偏移量,操作复杂。
铁塔单目视觉测量技术综合了几何相似法、几何形状约束法、几何光学测量法等测量方法进行测量。利用各自的优点实现铁塔尺寸的测量。
3 图像校正方法
由于图像相对于实物会发生畸变,图像和实物的尺寸关系不是一定的比例关系,因此需要对图像畸变进行校正。
为了探讨图像的校正方法,提高校正的准确性,研究校正方式时采用卡片式小相机,型号为CANON IXUS 85IS。该相机所照的照片可以在照片属性中显示出照相的参数,如焦距f。固定照片的像素数,垂直固定一把长钢板尺,钢板尺宽度为B,采用不同的距离照相,设相机至钢板尺间的距离为L,用图像处理软件量出钢板尺宽度对应的像素坐标差值ΔX,读数时以钢板尺距离照相机最近的位置读取。根据相机小孔成像的原理:
(1)
式中:k为常数,k值与像机和镜头有关,通过多次变换焦距和距离拍照可拟合求出k。
当铁塔某个尺寸已知时,则可以通过式(1)求出照相位置距铁塔的距离L。
根据铁塔的对称性还可以测量出相机相对于铁塔高度位置。这样就可以得到了2个必要数据L和h,h为铁塔需要测量位置距相机垂直距离。
铁塔由于较高,经常采用大仰角照相,大仰角图像校正就是必要的一环。为了更好地模拟现场和更好地找到修正算法,也需要采用卡片机大仰角拍摄。
4 变形校正算法
设想相机的成像遵循焦半径的成像原理,物像的成像先在一个虚拟的焦曲面上投影,然后再按比例向CCD感应器上投影,由此设计出如图1的校正计算。图1中将直立的铁塔先看成是竖直的一根线,铁塔上一点H。

图1 校正计算
FB为实物在成像中的虚拟投影面,L=OA,dx为dh在投影面上的投影,dx=BC,dh=HE,见图1。根据图1得出式(2):
(2)
对(2)式两端积分可得图像尺寸和实际尺寸HA的关系为:
(3)
式(3)中,L可以通过式(1)计算得出,也可以直接通过测距仪测量得出。AG可以通过测距仪实际测量得出,还可以通过测量照相机的实际仰角γ和扩散角β得出。实际距离尺寸测量更为准确,见图2。
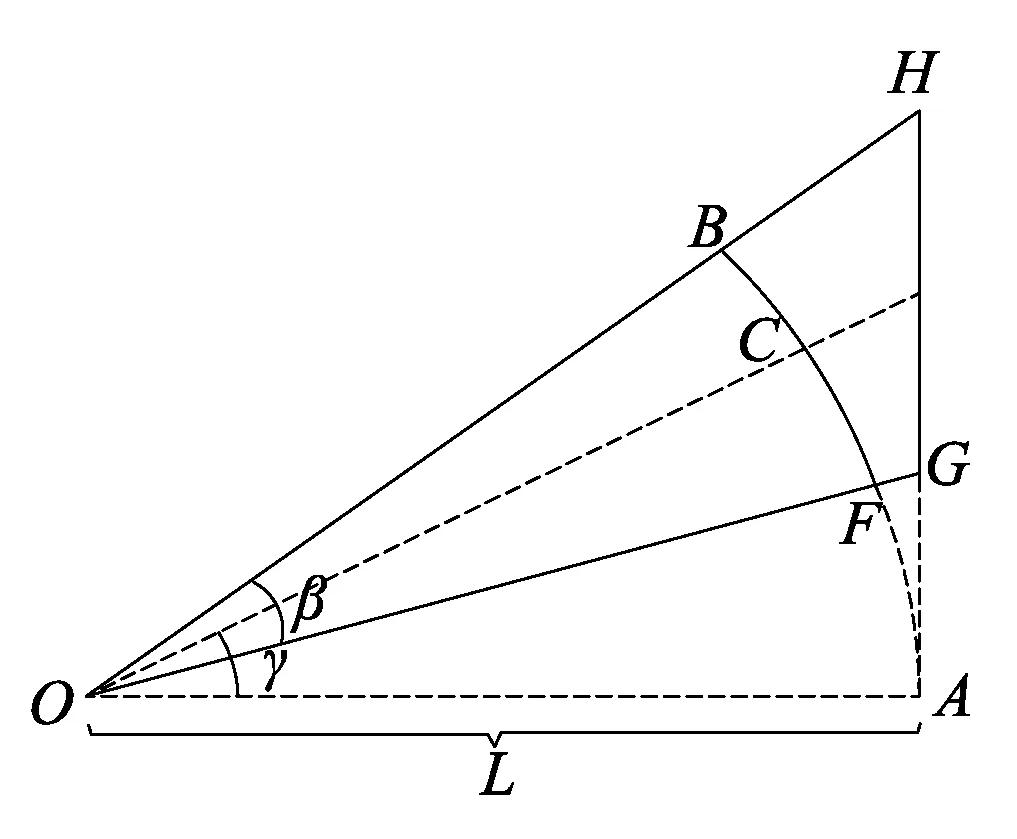
图2 按角度校正计算示意
用实际仰角γ和扩散角β计算HA值时,式(3)可以变换为式(4)。
(4)
将式(4)和式(1)式联立可得:
(5)
式(3)、(4)、(5)根据不同的已知条件分别选用。
5 铁塔单目视觉测量误差分析
影响基于光学测头特征点成像的单目视觉坐标测量系统的测量不确定度的主要因素包括两方面:一方面,与测量系统硬件配置有关的测量不确定度分量;另一方面,与测量系统的参数校准、特征点定位及测量算法等有关的测量不确定度分量[4]。
对钢板尺实际拍照,光学变焦放大倍数3.0,照相点距离钢板尺L=4 048 mm,尺子最低点距照相点垂直距离h=85 mm。得到3 648×2 736像素的图像,钢板尺的宽度在图像中为80像素点,实际宽度为30 mm,焦距19 mm。以100 mm间隔读取尺子的实际读数DS,图像中与实际点对应位置的像素坐标X、Y,按公式(3)计算得到测量点距尺子最下端的距离RH,以相邻两点做差,则得到实际每100 mm的视觉测量结果CL,并得到相对误差XD,和绝对误差JD,见表1。
表1 对钢板尺进行实际测量和计算的结果

DS/mmX/像素Y/像素RH/mmCL/mmXD/%JD/mm1 0002 02627122.77 100.73 0.73 0.73 9002 0292781 022.03 99.95 -0.05 -0.05 8002 032530922.08 99.29 -0.71 -0.71 7002 035783822.80 99.51 -0.49 -0.49 6002 0381 039723.29 99.43 -0.57 -0.57 5002 0421 297623.86 99.47 -0.53 -0.53 4002 0451 557524.39 99.23 -0.77 -0.77 3002 0481 818425.17 99.86 -0.14 -0.14 2002 0512 082325.31 100.22 0.22 0.22 1002 0542 348225.09 ---02 0572 614----
由表1可知,实际检测误差不超过±1%,对于铁塔变形、形态、位移等的测量已能够满足要求。
图像畸变分为视觉畸变和镜头畸变。这里视觉畸变是指由于位置投影关系的不同在图像上发生的畸变,它和照相的角度及焦距有关。镜头畸变是由于镜头加工制作过程中造成的镜片不同位置屈光度不同引起物体图像的畸变,镜头畸变是随机的,不同的镜头引起的畸变不同。
将表1中的CL按图像高度展开,可得到图3,由图3可知,测量结果有一定的对称性,这种对称性是镜头畸变引起的。

图3 测量结果沿图像高度的分布
根据不同相机和镜头测试发现,变形主要来自视觉畸变,镜头畸变引起的误差小于1%,在铁塔宏观测量中可以容忍,但当采用的镜头畸变较大时,需要对镜头畸变进行校正,校正的方法是图像畸变扣除公式(3)计算的视觉畸变后进行拟合求解镜头畸变校正算法,这样就可以大仰角测量物体。

6 铁塔单目视觉测量技术应用及注意事项
某线路3号铁塔发生弯曲,为分析弯曲的原因,需要对铁塔弯曲的部位进行详细测量。以塔底为零点,以塔顶为顶点做连线,以塔高为橫坐标。以塔腿各位置距连线的距离为纵坐标做曲线,见图4。图4中圈形标记处为塔腿变形的折点,说明该部位是引起铁塔变形的关键,需要对该部位进行校正。这样就解决了铁塔带电测量的难点,实现了方便快捷的测量目的。

图4 3号铁塔塔腿挠度测量结果
单目铁塔视觉测量减小了图像畸变中的视觉畸变,解决了大角度测量的问题,如果需要更精确的测量还需要对镜头畸变进行校正。另外铁塔实际为锥形结构,测量时需要根据铁塔的几何参数进一步的修正。
为了减小误差,如果没有对镜头畸变进行校对,则照相时应将被测量物体置于图像中部,这样可以减小测量误差。采用长焦镜头会减小测量误差,最好选用长焦镜头并配三角架。
铁塔单目视觉测量技术为平面测量,对远近尺寸不敏感,因此测量时还需要考虑塔材的倾斜因素。为了实现包括深度方向的立体测量,也可以通过拍摄两张以上的图像,根据图像的投影关系,实现单目立体测量。
参考文献:
[1] 黄桂平,李广云,王保丰,等.单目视觉测量技术研究[J].计量学报,2004,25(4):314-317.
[2] 岳 亮,李自田,李长乐,等.空间目标的单目视觉测量技术研究[J].微计算机信息,2007,23(2-3):273-275.
[3] 韩延祥,张志胜,戴 敏.用于目标测距的单目视觉测量方法[J].光学精密工程,2011,19(5):1110-1117.
[4] 刘长英,高印寒,车仁生.单目视觉测量系统不确定度的分析
[J].机械工程学报,2008,44(7):75-78.
[5] 陶声祥,吴宜灿.基于双目视觉测量的放疗位置验证方法研究[J].核技术,2007,30(3):219-221.
[6] 胡 勇 ,刘 强 ,王从军,等.双目视觉测量传感器研究[J].传感器技术, 2005,24(2):86-88.
[7] 娄小平,郭美萍.双目视觉测量系统标定精度提高方法研究[J].北京信息科技大学学报, 2010,25(1):16-20.