基于ARM的中频发电机组电气输出信号模拟装置设计
2012-11-10张兴龙张予祥
张兴龙, 张予祥
(上海船舶运输科学研究所 军品分所,上海200135)
0 引 言
船舶电站为全船设备提供所需的电力,由原动机、发电机和附属设备及配电板组成,目前电站按照供电频率分为工频(50 Hz或60 Hz)和中频(400 Hz)两种电站系统。工频电站自动控制技术已广泛应用于各型号舰船,可以实现对不同原动机组自动控制,多个电站发电机组自动控制及发电机组的有功、无功综合调控等功能。为了降低设备的自重,一些有特殊用途的船用设备采用400 Hz中频交流电供电。中频电站监控设备作为控制装置需要对中频电量参数进行准确测量,以期实现精确控制,其中主要电量参数包括机组的频率和功率因数等。目前中频(400 Hz)电站自动控制仍是国内外公认的难题,能用于试验的中频(400 Hz)发电机组数量少且价格昂贵。为了降低试验成本,提高中频电站监控装置调试效率,在ARM技术与发电机原理方面进行了深入研究,成功地利用LPC1758芯片研制出了中频发电机组电气输出信号模拟装置,为中频电站监控设备的可靠性试验和测量精度验证提供了实验依据。
1 中频发电机组电气输出信号模拟装置的软、硬件原理
中频发电机组控制的关键在于中频电量测量,因此中频发电机组的输出信号模拟装置要能够模拟实际机组产生的三相电信号。中频电量测量与工频电量测量目的相同,都是采样交流电压、电流,送入处理器,计算它们的幅值、频率以及有功功率等电量参数。
中频发电机组为三线星型绝缘系统,中心点不接地,输出A、B、C三相。可以通过两个电压互感器分别测量A相与B相的线电压Uab和C相与B相的线电压Ucb,通过两个电流互感器分别测量A相电流Ia和C相电流Ic,它们的相位关系见图1。然后将这些电压电流参数送入中频测量模块,经过采样、滤波、线性变换等电路处理后进行测量分析。
三相功率的测量通过二瓦计法进行,分别测量AB相和CB相功率,相加即得ABC三相功率。二瓦计法测功率的公式下:

式(1)中:θ1为线电压Uab与相电流Ia之间的夹角;θ2为线电压Ucb与相电流Ic之间的夹角。
验证中频电站监控装置测量精度的最好办法是对实际的中频机组进行测量,所测数据与校验合格的电量分析仪的数据进行对比。如果没有足够的资金用来购买中频发电机组作为中频电站监控装置的检验设备,那么有必要设计1种更为经济便捷的替代装置。为此设计了能产生中频电压电流信号的模拟装置,用以替代实际试验中所需的中频发电机组。
中频测量需要两路电压信号、两路电流信号,同时两路电压信号、电流信号之间还须满足一定的相位关系,因此中频发电机组电气输出信号模拟装置要有能力产生这些信号并可调相,同时需要信号的频率为400 Hz。
1.1 模拟装置的硬件原理
中频发电机组电气输出信号模拟装置的硬件组成见图2,模拟装置的微处理器采用基于Cortex-M3核心的ARM芯片LPC1758FBD80。芯片使用高性能的ARM Cortex-M3核心的ISC内核,具有3级流水线哈佛结构,支持单周期硬件乘法和除法,工作频率最高为100 MHz。它内置高速存储器(高达512 k B的闪存和64 k B的SRA M),丰富的增强I/O端口和联结到2条APB总线的外设,同时拥有丰富的接口:脉冲宽度调制器(Pulse Width Modulator,PWM)、模数转换器(Analog-to-Digital Converter,ADC)、I2C总线、串行外设接口(Serial Peripheral Interface,SPI)、控制器区域网(Controller Area Net work,CAN)、通用串行总线(Universal Serial Bus,USB)、RIT等。此外3.3 V供电使得该芯片具有低功耗的特点。

图1 三相矢量图

图2 中频发电机组电气输出信号模拟装置硬件框图
通用输入输出口(General Pur pose Input and Output,GPIO)工作频率高达100 MHz。从图2中可知LPC1758的GPIO产生了包含有相位信息的电压电流方波信号。GPIO所需的定时由RIT提供。
RIT的时钟由内核时钟分频得到,每个时钟周期计数1次,达到设定的次数时可以中断。设计中利用RIT来产生基准时间1μs。并把1μs作为定时的基本单位。
LPC1758的时钟模块由时钟源、锁相环、中央处理器(Central Processing Unit,CPU)、时钟分频器、外设时钟分频器组成。内核的时钟由CPU时钟分频器提供,该时钟经过外设时钟分频器分频之后提供给RIT等外设。当CPU时钟为100 MHz时,外设的时钟最高可达100 MHz,因此RIT可以分辨10 ns的时间间隔。中频的周期T为2.5 ms,RIT可以计数250 000次。在1μs的基准时间下,1个中频周期RIT也可计数2 500次。
输出波形的周期误差来源于电平切换时的意外中断及处理相关程序的延时。Cortex-M3核心的高集成度和中断矢量控制器(Nested Vectored Interrupt Controller,NVIC)使得中断可以快速执行,中断响应延时最短为4个指令周期。周期误差最大值为中断响应和执行时间及相关程序执行时间的和ΔT的2倍。则周期误差率为

式(2)中:ΔT为46×102ns,则δ为0.036 8%。占空比最大误差率为δ/0.5=0.073 6%。
相位角θ的误差来源于程序中断处理延时误差与舍小数误差。在1μs的基准下可以分辨的最小角度为0.144°。例如需要相位差为1°,则舍小数误差为-0.136°,中断处理延时误差为0.132°由于两个误差符号不同,则总误差Δθ取绝对值较大的-0.136°。功率P的误差可用下式表示:

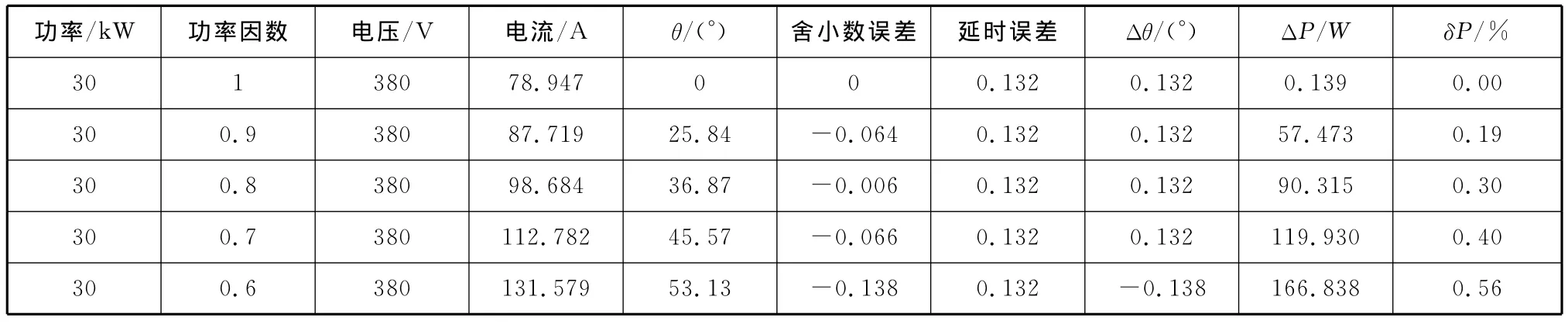
表1 相位角误差对功率的影响
因此利用RIT定时功能可以准确地产生4路频率为400 Hz、占空比为50%的方波脉冲,且可以满足精度要求及不同信号间的相位要求。4路方波脉冲经过7阶有源滤波电路后变为正弦波信号,用以模拟中频机组产生的电压电流信号。
1.2 模拟装置的软件原理
设计编程环境为Keil UV3 MDK。Keil UV3 MDK使用C语言编程,它提供了丰富的库函数和功能强大的集成开发调试工具,便于开发调试。在软件设计中使用嵌入式操作系统μC/OC-II,提高了系统的实时性和可靠性。
中频发电机组电气输出信号模拟装置4路方波信号的时序图见图3,根据图1可知,当发电机组负载为感性负载时,相电压Ua超前相电流Ia,角度为θ,当前功率因数则为cosθ。线电压Ucb超前线电压Uab的角度为60°,超前时间为60÷360×2 500μs;线电压Uab超前相电流Ia的角度为30°+θ,超前时间为(30+θ)÷360×2 500μs;当θ=30°时,线电压Ucb与相电流Ic同相位,当θ>30°,线电压Ucb超前相电流Ic的角度为θ-30°,超前时间为(θ-30)÷360×2 500μs,当θ<30°,线电压Ucb滞后相电流Ic的角度为30°-θ,滞后时间为(30-θ)÷360×2 500μs。
实际中,中频机组运行时线电压Uab、Ucb保持恒定,相电流Ia、Ic和θ随负载变化而变化。模拟装置提供了相应的电压和电流信号,同时让θ按照需要进行变化。
μC/OS-II系统的移植分3个部分:
1)在OS_CPU.H中定义数据类型、开/关中断函数以屏蔽编译器和处理器;定义堆栈的增长方向;定义任务切换函数。
2)在OS_CPU_A.ASM 中,用C语言编写几个函数:OSStart High Rdy(),OSCt xsw(),OSInt Ct x Sw(),OSTickISR()。
3)定义 OSTask-Stkl nit()函数,声明函数 OSTask Create Hook、OSTask Del Hook、OSTask Sw Hook、OSTask-Start Hook、OSTi me Tick Hook。
系统运行的流程图见图4。
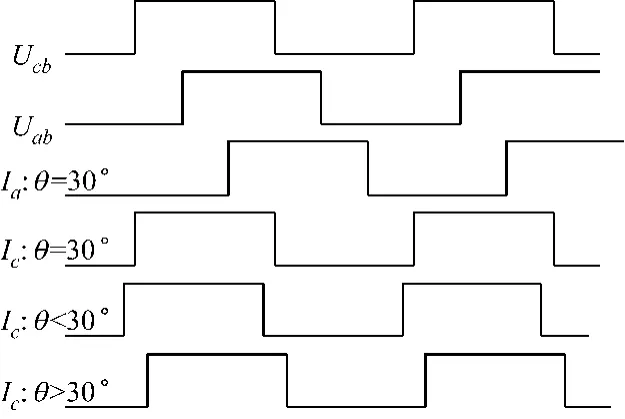
图3 电压电流方波时序图
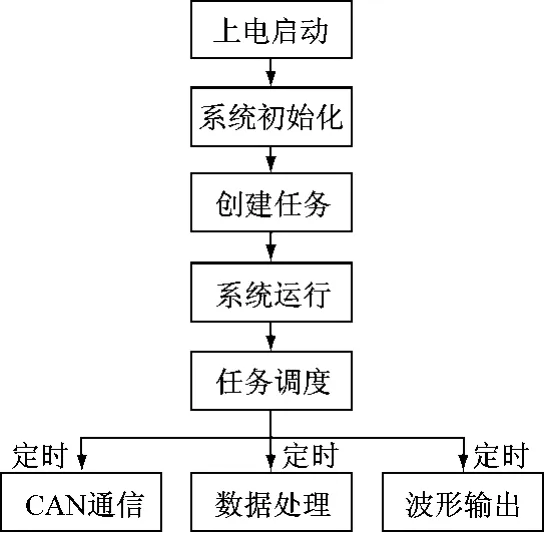
图4 系统运行的软件流程图
2 中频发电机组电气输出信号模拟装置的调试原理
为了更加简便地修改模拟装置的参数,采用上位机控制模拟装置。通过上位机发送参数来控制模拟装置的输出信号。通过VC++软件编程实现人机界面。
由计算机、CAN收发装置、中频发电机组电气输出信号模拟装置等组成(见图5)。图5中,中频发电机组电气输出信号模拟装置的控制器为LPC1758。
在上位机中使用VC++软件建立了人机界面,通过USBCAN与模拟装置进行通信,可以方便地进行信号输出和监视模拟装置,通讯协议为CAN2.0B。通过使
用MFC类库开发了界面程序,同时用到了USBCAN驱动函数库(见图6)。

图5 系统CAN总线网络图
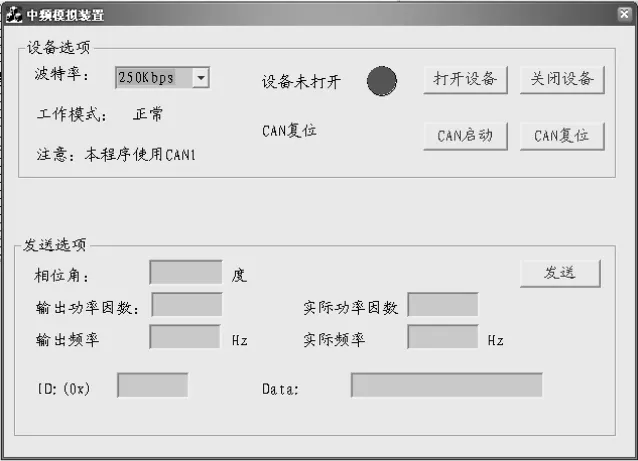
图6 人机界面
人机界面包含了2个子区域:
1.设备选项,可以选择波特率,通过打开设备和关闭设备2个按钮控制CAN收发装置的打开和关闭,CAN启动和CAN复位按钮控制CAN的工作和停止。工作时显示“设备已打开”,同时指示灯闪烁。
2.发送选项,发送区域可以设定相位角和功率因数、监视实际的功率因数和频率,还可以发送任意的数据包到任意CAN节点。
调试时,通过计算机接口软件的界面,置入相电压Ua与相电流Ia的夹角θ,CAN收发装置将θ变量通过CAN总线输入到中频发电机组模拟装置(见图5)。模拟装置接收到θ,并根据图3的时序计算4路方波之间的夹角,最终产生4路相对应的正弦波形。中频发电机组功率测量模块根据下式计算发电机组的有功功率。

3 结 语
基于Cortex-M3核心ARM处理器实现了中频发电机组电气输出信号模拟装置的设计,它的高速性能,嵌入式操作系统及RIT、GPIO等外设的使用,保证了中频电气信号高精度波形的输出。
[1] 王国强,盛振邦.船舶推进[M].上海:上海交通大学出版社,1995.
[2] 张亮,王继阳.MATLAB与C/C++混合编程[M].北京:中国人民邮电出版社,2008.
[3] 林俊杰.Visual C++6程序设计经典[M].北京:科学出版社,1999.
[4] 陈赜,刘振兴,李福宗,等.ARM嵌入式技术实践教程[M].北京:北京航空航天大学出版社,2005.
[5] 刘尚军.ARM嵌入式技术原理与应用[M].北京:北京航空航天大学出版社,2007.
[6] 郭凯东,张东来,苏光明.嵌入式操作系统μC/OS-II在通信电源监控中应用[J].电力自动化设备,2005(4):69-71.
