船舶桥楼值班报警系统设计与实船应用
2012-11-10俞叶萍潘万欣
俞叶萍, 潘万欣, 李 祺, 张 叶
(上海船舶运输科学研究所 民品分所,上海200135)
0 引 言
随着电子技术和计算机网络的不断发展,各种通讯导航、无线电设备的功能和自动控制能力越来越强,船舶自动化程度也越来越高。为了健全船舶安全及救助的手段,避免由于驾驶员疏于管理、缺乏必要的应急机制引发海难事故,国际海事组织(International Mariti me Or ganization,I MO)海上安全委员会第86次会议,通过了第282号关于国际海上人命安全公约(Inter national Convention f or the Safety of Life at Sea,SOLAS)公约修正案的决议。该决议强制要求2011-07-01起建造的各等级船舶上安装满足IEC(Inter national Electr otechnical Co mmission)62616标准的船舶桥楼值班报警系统(Bridge Navigational Watch Alar m System,BNWAS)。
作为一种新型的船舶航行安全设备,BN WAS的主要作用是防止驾驶员在船舶航行时不履行值班职责使船舶处于无人操纵的危险局面,系统通过产生一系列逐步延伸的报警引起相关人员的注意,确保值班驾驶员履行值班职责。
根据中国船舶工业行业协会预测数据,2012年世界新船订造量为7 000~8 000万DWT,造船完工量约1.5亿DWT。随着SOLAS有关条款的强制执行,各类新旧船舶要求配套BNWAS的需求与日俱增,BN WAS产品市场前景良好。
2010年至今,国内外有关主流船舶配套厂商为了抓住市场机遇,已先后推出了10多种型号的BNWAS产品,其中早期产品在功能设计上并不能满足IEC 62616标准。上海船舶运输科学研究所为满足IEC 62616标准和MSC.128(75)决议的规范要求,研制了SRI-VC2110BW船舶桥楼值班报警系统,该系统已成功应用于实船,并受到用户的亲睐。
1 系统设计
1.1 系统架构
BN WAS系统主要由主控单元、选择单元、复位单元和报警单元等组成。各单元主要分布在驾驶室、船长室、值班舱室和公共位置。主控单元作为系统的核心单元,通过面板按键和数码显示实现人机交互,并控制着整个系统的运行,把声光报警信号传输到复位单元和报警单元进行系统延伸报警,同时监控系统和外部设备传送的复位信号;选择单元用来指定第2级远程报警的对象;复位单元实现第1级声光报警功能,并可以对系统进行复位;报警单元实现第2级远程报警和第3级远程报警功能(见图1)。
1.2 关键问题及技术解决方案
BN WAS的主要功能是3级延伸报警。驾驶人员值班时需要在休眠时间3~12 min(可调)内对系统进行复位。第1级报警是指,当驾驶员未按规定时间对系统进行复位操作时,驾驶室报警装置发出灯光报警信号,15 s内仍未复位,驾驶室报警装置再发出声音报警;第2级报警是指,1级报警未得到响应15 s后将声音报警延伸至指定的后备值班人员房间;第3级报警是指,系统在90~180 s(可调)内未复位时,将报警延伸至所有舱室和公共位置(见图2)。

图1 系统架构
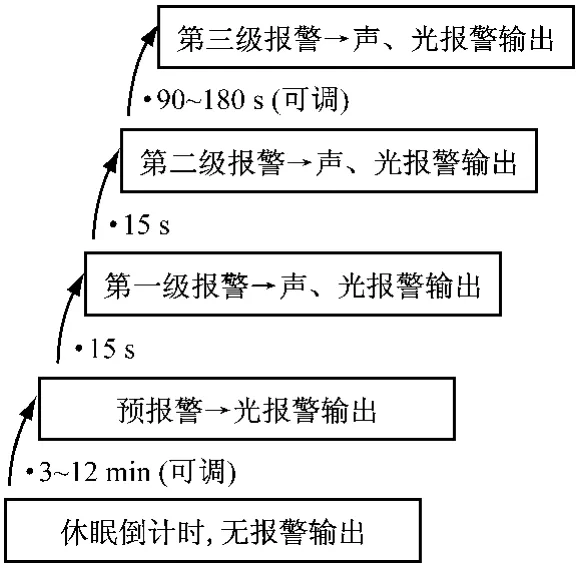
图2 BNWAS报警机制
系统进行延伸报警后,在值班房间或公共舱室内无法取消报警,必须在驾驶室才能对系统进行复位操作,借此确保和督促值班驾驶员履行其值班职责。
1.2.1 休眠时间设置
根据IEC标准,休眠时间为3~12 min。根据实船情况,具有操作权限的人员可以调整休眠时间的预设值。
为了确保系统安全可靠地运行,方便实船管理人员的操作,在对设置休眠时间的设计中,从软件和硬件两方面进行了综合考虑。
硬件方面,选用带钥匙的OFF/MANU/AUTO三档选择开关,任选1种模式后锁定,在系统运行期间,不能任意切换模式(具有操作权限的人员可以切换)。
软件方面,当OFF模式切换到MANU模式初始30s内,可以通过面板“时间”按键设置休眠时间值,允许设置范围为3~12 min。设置“确认”后,完成休眠时间预设值的存储,系统随即退出时间设置模式,按该次设置的休眠时间值启动倒计时(见图3)。
1.2.3 报警传输
主控单元作为系统核心单元,控制着整个系统的运行,当单片机发出报警信号时,主控单元必须准确及时地把报警信号传输给指定的复位单元和报警单元。由于BNWAS各部分分布在不同的位置,且复位单元和报警单元离主控单元的距离较远且不固定,要求报警信号的远程传输能力较强。
为了简化硬件电路,选用功率较大的继电器来传送报警信号。但由于CPU输出的是TTL电平,不能直接驱动继电器,因此在设计中,采用了集成达林顿管ULN2003驱动继电器电路,从而实现报警信号的远程传输,传输最大距离约为400 m。
ULN2003是高耐压、大电流达林顿阵列,由7个硅NPN达林顿管组成,内部集成了1个消线圈反电动势的二极管,采用集电极开路输出,输出电流大,可直接驱动继电器。在5 V工作电压下,每对达林顿管都需串1个2.7 kΩ的电阻与单片机相连,实现最大驱动电压50 V,电流500 mA的带载能力。报警信号传输电路见图4。

图3 休眠时间设置程序流程图

图4 报警信号传输电路

图5 电源热备份原理框图

图6 复位按钮自检程序流程框图
1.3 提高可靠性的措施
IEC标准规定船舶在海上航行途中的任何时候,BN WAS均应保持运行,且必需对人为导致的不安全因素进行实时监控。为此进行了深入研究,在系统可靠性设计中,主要采取电源热备份和复位按钮自检两方面的措施。
1.3.1 电源热备份
为保证当主电源故障或失电的情况下BNWAS仍可正常运行,电源部分采用了热备份设计。正常情况下,采用船用交流电源供电,应急电源处于热备用状态;当交流电源故障或失电后,应急电源自动接入系统,为系统提供工作电源,确保系统电源始终正常(见图5)。
1.3.2 复位按钮自检
系统各单元上的复位按钮,主要功能是对系统进行复位,消除各阶段声光报警。在实船使用中,为了避免复位按钮故障或人为蓄意破坏导致系统不能正常工作,软件设计中增加了系统对复位按钮的自检功能。
检测系统各单元复位按钮是否持续被激活,若检测到被持续激活30 s以上,则系统进行故障报警,通知相关人员进行处理,并自动隔离相关单元,确保系统3级延伸报警和紧急呼叫功能正常实现(见图6)。
2 关键性能测试
系统设计完成后,主要性能参数严格按照IEC 62616标准规定的技术指标进行调试。在时间方面,由于精度要求较高,通过软件多次修正补偿后,各项延时时间精度满足IEC标准允许的误差范围:<5%或5 s,取较小者(见表1)。
蜂鸣器作为声音报警的对外部件,在系统中起着十分重要的作用,IEC标准除了要求驾驶室内安装的报警装置需要有报警音调可调功能外,还严格规定了驾驶室、舱室报警蜂鸣器响度技术指标。系统对各单元蜂鸣器响度的测试情况见表2。

表1 时间精度测试表

表2 蜂鸣器响度测试表
3 实船应用结果
SRI-VC2110BW船舶桥楼值班报警系统根据IEC 62616标准和MSC.128(75)决议的规范要求进行开发研制,采用先进的微机控制技术,实现及时准确的报警和响应。经过权威检验机构——上海仪器仪表自控系统检验测试所的测试和验证,各项功能及性能指标均达到IEC 62616标准,顺利通过中国船级社(CCS)规定的各项型式试验,并获得了CCS型式认可证书。
设备实船应用具有广泛的适配性,满足各类新、旧船舶配套的需求。通过市场推广,目前已出口新加坡10余套,并在国内各船厂、航运公司等10余条船上安装使用。设备安装方便、功能齐全、运行可靠、操作简单,有力保障了船舶航行安全,受到广大用户的好评。随着SOLAS有关条款的强制执行,BN WAS作为必装产品将在各等级船舶上广泛应用,市场应用前景良好,并将逐步成为船舶航行安全设备中不可或缺的组成部分。
[1] 柳邦声.驾驶台航行值班报警系统(BNWAS)的组成和安装[J].航海技术,2010(3):41-43.
[2] 孙向晖.船舶桥楼值班报警系统(BNWAS)中检测系统的实现[J].企业技术开发,2011(7):26-27.
