上海船舶运输科学研究所机舱自动化技术的新进展
2012-11-10侯馨光
侯馨光
(上海船舶运输科学研究所,上海200135)
0 引 言
上海船舶运输科学研究所(以下简称船研所)成立于1962年,至今已有50年历史,在船研所成立的第一天起就开始了机舱自动化技术的研究,在机舱自动化领域曾经开创过不少的国内第一,有过一段辉煌的历史。在这里着重介绍船研所最近十几年机舱自动化技术的新进展。
1 硬件标准化、模块化、系列化
硬件的标准化、模块化、系列化是技术发展的必然趋势,它既能节省自动化系统的生产成本、提高产品质量,又能减轻用户的使用成本、节省培训费用、减少备品备件数量。船研所通过这十几年的研发已经形成了三类标准化、模块化、系列化的硬件模块系列。
1.1 STI-VC2100系列硬件
STI-VC2100系列硬件于1997-1999年研发,目标是能应用于我国海军舰艇机舱自动化系统,是21世纪新一代的通用硬件。该系列模块分成四大类,即管理类、控制类、现场数据采集类和通讯类,模块共计15种。采用这一系列的模块,可以构建海军舰艇所需的主机遥控系统、监测报警系统、电站监控系统以及损管系统等。
STI-VC2100系列模块的特点是:
(1)符合国际通用标准;
(2)满足军品对抗冲击、抗电磁兼容性的高要求;
(3)模块采用积木式结构,电路板种类少,可形成小批量生产;
(4)模块内置智能化程序,组建系统时可不编程或少编程;
(5)模块间采用高可靠的现场总线连接,系统集成方便且减少了机舱电缆。
如:采用管理类模块与通讯类模块即可方便地搭建成上位管理机;采用控制类模块即可自由地组合成各类控制器。
STI-VC2100模块结构有两种,控制类模块为铝合金框架结构,数据采集类模块为铝合金型材盒式结构(见图1)。

图1 STI-VC2100模块结构图
1.2 SRI-VC2110系列硬件
SRI-VC2110系列模块于2008-2010年研制,它是在总结STI-VC2100系列硬件模块开发经验的基础上,为民用船舶三大基本船型(集装箱船、油船、散货船)的三大基本系统(主机遥控系统、监测报警系统、电站控制与管理系统)专门开发的系列模块。
所有模块均采用相同结构的铝合金外壳。外壳的长短有3种(1、2/3、1/3),可根据需要组合。由于民船的要求与军船不同,故在模块分类上和结构形式上也作了变化。在模块分类上SRI-VC2110系列中没有管理类和通信类,增加了扩展类。这主要是考虑民船的可靠性和经济性要求的差异。
该系列模块分为现场控制类、现场处理类、现场数据采集类和扩展类等四大类。
在结构上所有模块均采用统一规格的铝合金型材加两端封板组成。根据输入、输出接口的数量采用1/3标准长、2/3标准长和1标准长三种规格。1标准长为234 mm。三种规格的模块外观图见图2。

图2 STI-VC2110模块外形图
STI-VC2100系列模块中的中央处理器(Central Pr ocessing Unit,CPU)为196单片机,而SRI-VC2110系列模块中的CPU用的是ARM7、ARM9,电路设计采用现场可编程门列阵(Fiel d Pr ogra mmable Gata Array,FPGA)技术,模块中的操作系统采用μcos-Ⅱ实时操作系统,每一模块均带有以太网接口和控制区域网(Contr oller Area Net wor k,CAN)接口。与STI-VC2100系列相比技术上前进了一大步。
1.3 海军综合平台系统NSGP系列模块
2010-2011年船研所根据综合平台管理系统标准化硬件模块要求,研制成功了NSGP系列的标准化硬件,并通过了相关组织的技术鉴定。该系列模块是根据海军的要求并参照CPCI计算机的标准而制定。
NSGP系列模块的特点是:
(1)采用CPCI计算机标准;
(2)操作系统可以采用Windows平台,也可以采用Vx Wor ks平台;
(3)能满足海军综合平台管理系统(Integrated Platf or m Management,IPMS)的需要。
NSGP系列模块分为操作类、显控类、通讯类和输入/输出类等四大类。
NSGP系列模块的机械结构为CPCI计算机框架式6 U板卡结构,其外形尺寸见图3。
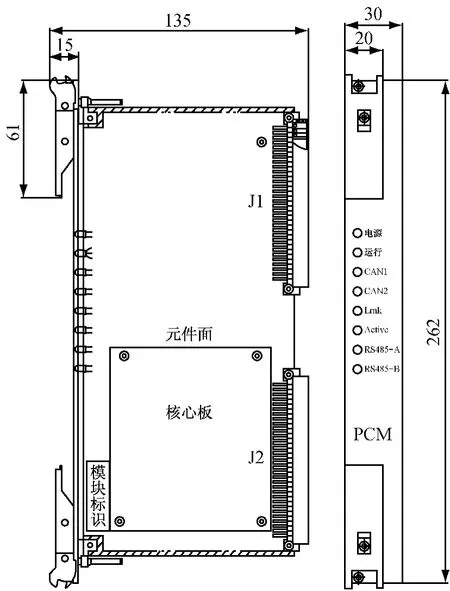
图3 NSGP系列模块外形图
2 软件组态化
长期以来,在船舶监控系统软件的开发上存在着开发周期长、工作量大、修改困难、维护难度大、软件开发因人而异、因开发人员的流失造成软件维护困难等问题,严重影响舰船监控设备的生产。与发展迅速的计算机通信技术、计算机网络技术、软件开发技术相比较,越来越显得跟不上时代发展的步伐。为此,船研所于2008年组建了组态软件开发项目组,在市场上现有的工业监控组态软件的技术水平上开发适合舰船监控系统应用的组态软件。通过合作开发,于2009年完成了舰船监控系统组态软件试用版。经一年多的试用,于2011年完成了舰船监控系统组态软件的正式版。
2.1 舰船监控系统组态软件特点
众所周知,工业监控组态软件为1个通用型的组态软件,它能用于各种工业系统的监控系统。正因为它的通用性,使它不能较好的适用于我们的舰船监控系统,根据使用Intouch组态软件的经验,发现其不具备我们需要的所有功能,如工作站间历史数据的同步功能、图形模板功能、逻辑报警功能等。开发人员仍要花很大的精力编程,工业组态软件并不能使我们摆脱舰船监控系统软件开发的困境。而舰船监控系统组态软件的成功研制,基本上改变了船研所舰船监控系统软件开发的现状,把软件的编程工作变成了系统的组态工作,大大缩短了软件开发周期,提高了软件的质量和可靠性。
组态软件一般由工程管理器、工程浏览器和运行系统三部分组成。工程管理器和工程浏览器统称为开发系统,有时也将工程浏览器单独称为开发系统。舰船监控系统组态软件与一般的组态软件结构相似,区别在于它的各部分功能更适合于舰船监控系统的组态需要,如设立标准的组态库,增加舰船监控系统所需的各项功能,采用简化的软件修改方法等。
舰船监控系统组态软件可以实现系统组态、硬件组态、数据库组态、界面组态,通过这些组态可完成监控系统软件的开发工作。图4为舰船监控系统组态软件的结构分布图。
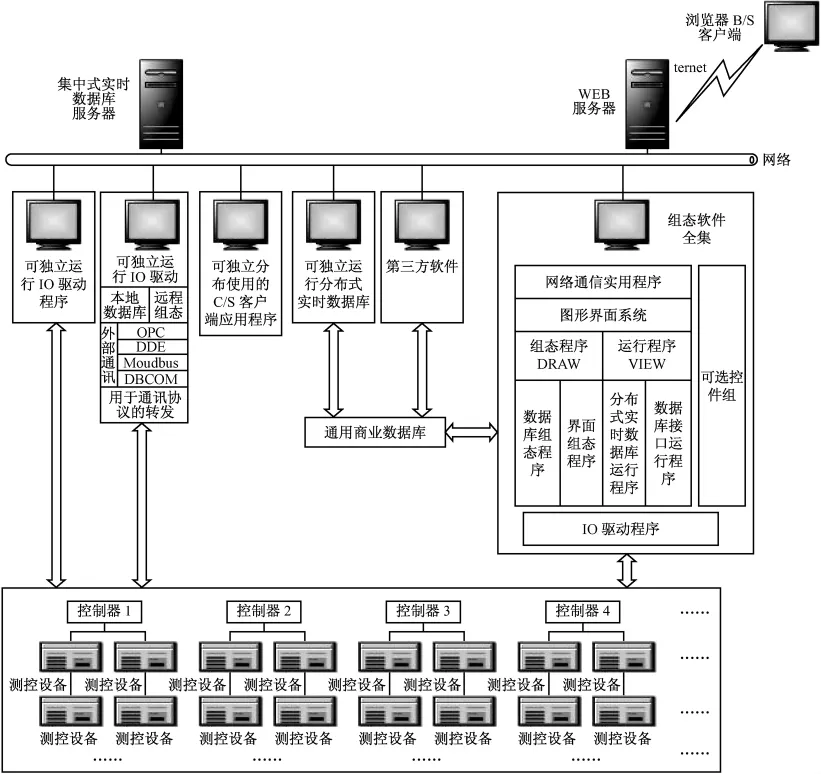
图4 舰船监控系统组态软件的物理结构分布图
2.2 组态软件的应用
舰船监控系统组态软件已成功应用于海军×××型导弹护卫舰和5 500箱集装箱船。
图5为用舰船监控系统组态软件开发的海军×××型导弹护卫舰的上位管理机的人机界面。
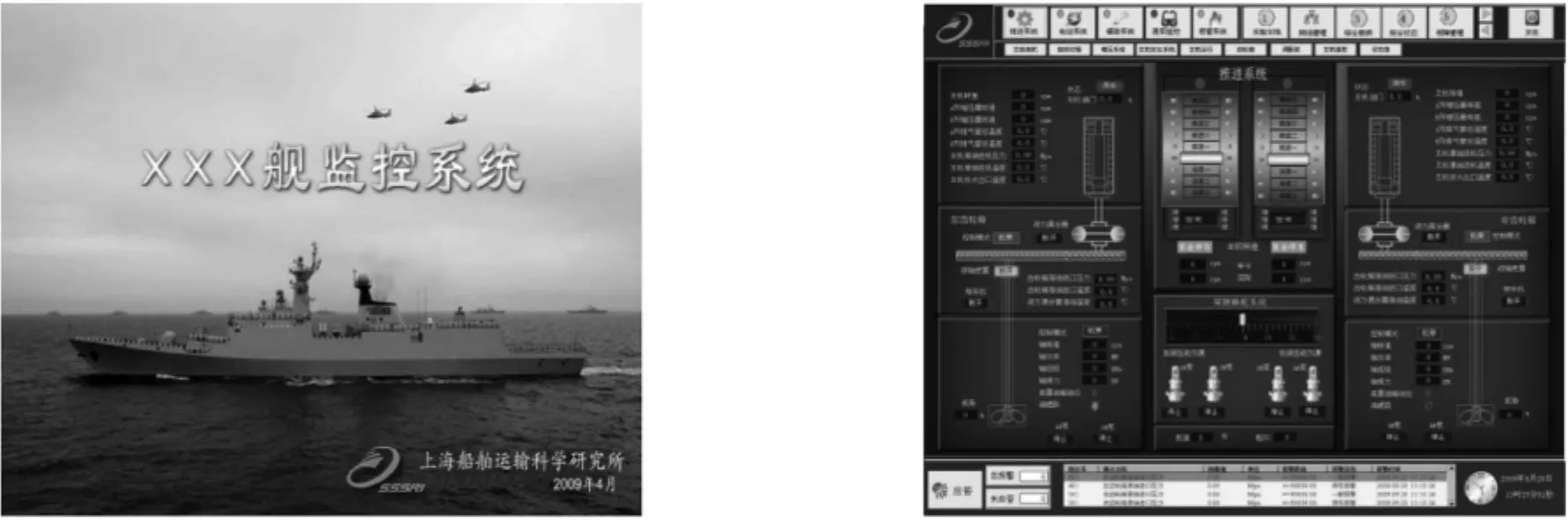
图5 海军某型导弹护卫舰上位管理机的人机界面
图6 为用舰船监控系统组态软件开发的5 500箱船的上位管理机的人机界面。

图6 5 500箱船的上位管理机的人机界面
3 系统集成网络化、信息化、智能化
在硬件标准化、模块化、系列化和软件组态化的基础上,研发了新的系统。
3.1 STI-VC2100机舱监控系统
STI-VC2100机舱监控系统是船研所在20世纪末推出的面向21世纪的全新监控系统。首套产品用于海军××4型导弹护卫舰。该系统包括主机遥控系统、监测报警系统和电站监控系统等三大基本系统。系统采用两层网络结构,两层网络均采用现场总线,CAN网。系统硬件均由STI-VC2100系列模块构建。迄今我国海军已有数十艘舰艇包括导弹护卫舰、综合登陆舰、医疗船、补给船等多类型舰船装有船研所生产的STI-VC2100机舱监控系统。
STI-VC2100不仅可用于常规的双机双桨柴油机动力装置,而且可用于四机双桨的柴-柴联合动力装置。STI-VC2100中的双机并车控制技术优于国外的双机并车技术。STI-VC2100把调距桨的控制功能也已包括其中。STI-VC2100机舱监控系统原理框图见图7。
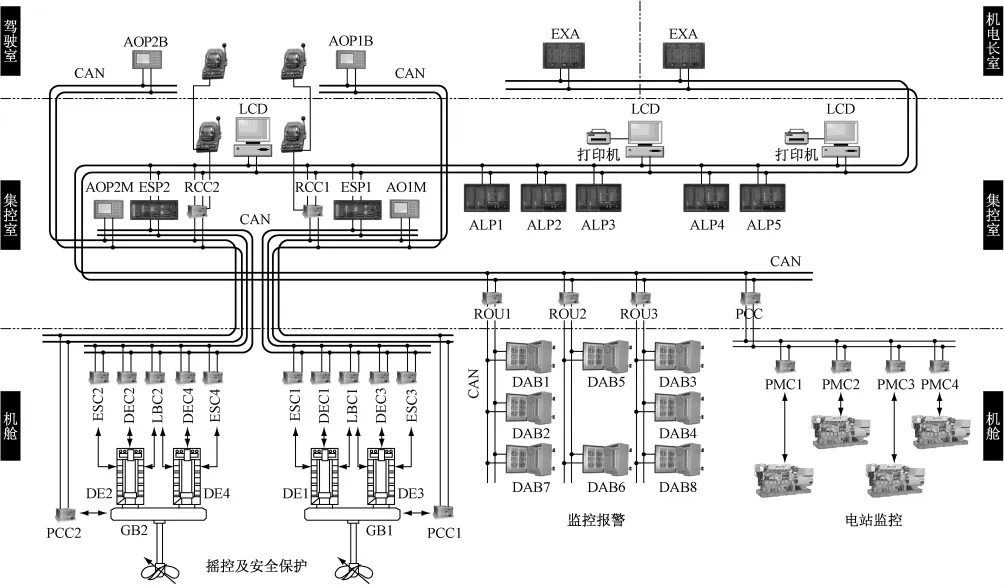
图7 STI-VC2100机舱监控系统原理框图
3.2 SRI-VC2110系列机舱监控系统
SRI-VC2110系列机舱监控系统包括如下系统:
(1)主机遥控系统SRI-VC2110RC,其中包括车钟系统SRI-VC2110TG、车令记录仪SRI-VC2110TR、数字电子调速器SRI-VC2110EG;
(2)安全保护系统SRI-VC2110SP;
(3)电站控制管理系统SRI-VC2110PM;
(4)通用监控系统SRI-VC2110 MC,其中包括轮机员安全系统SRI-VC2110ES、轮机员呼叫系统SRIVC2110EC;
(5)延伸报警系统SRI-VC2110 MC-E。
SRI-VC2110系列机舱监控系统均由SRI-VC2110系列模块构成。各系统均采用网络结构,上层采用工业以太网,下层采用现场总线CAN网。图8为监控系统原理框图。
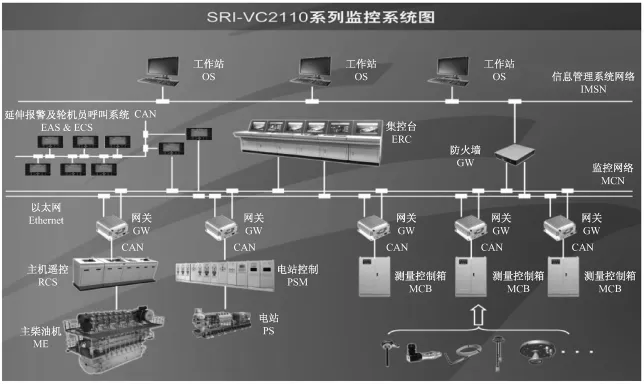
图8 监控系统原理框图
SRI-VC2110RC主机遥控系统可以用于MAN B&W低速柴油机的遥控,也可以用于 WASILA-SULZU低速柴油机的遥控。该系统本身带有低速柴油机的调速功能。SRI-VC2110 RC主机遥控系统原理框图见图9。
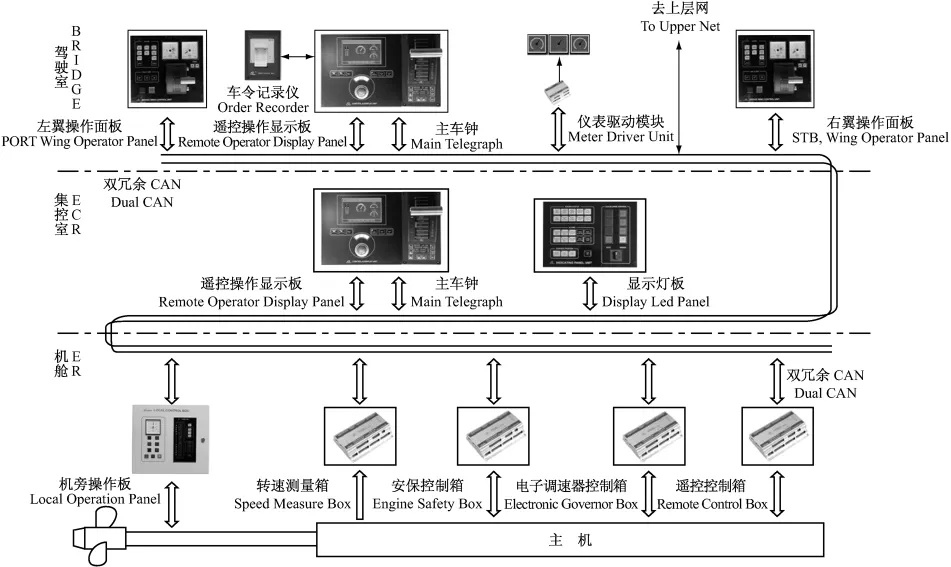
图9 SRI-VC2110RC主机遥控系统原理框图
SRI-VC2110RC系统也可与其它调速器联合使用。
考虑到柴油机对调速器的单独需求,船研所于2009开始研制低速大功率数字式电子调速器SRIVC2110EG。该调速器采用SRI-VC2110系列模块,配有电动执行机构。经试验,该调速器的性能与Kongsberg的数字式电子调速器性能相当。SRI-VC2110EG电子调速器原理框图见图10。

图10 SRI-VC2110EG电子调速器原理框图
3.3 综合平台管理系统(IPMS)和集成船舶管理系统(Integrated Vessel Messaging System,IVMS)
2003年12月船研所在国际海事会议上,首先在国内推出了综合平台管理系统(IPMS)的概念,引起了我国海军有关部门的兴趣。2005年初海装机关召开了舰艇平台信息化建设研讨会,进一步推动了我国各有关部门对IPMS的关注。
2005年,船研所在科技部的支持下,开展了综合平台管理系统的研究,于2006年完成了以海军××4型舰为对象的综合平台管理系统科研样机研制。该系统以机舱自动化为核心,融入损管及驾驶自动化等系统。××4型综合平台管理系统原理框图见图11。
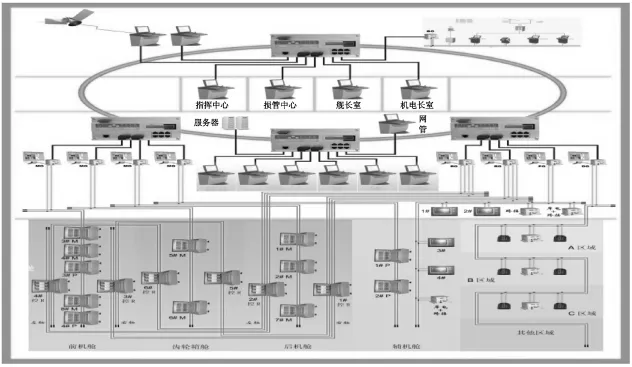
图11 ××4型综合平台管理系统原理框图
IPMS网络结构为两层网络结构,上层为工业以太网,采用环形光网,通讯速率为1000/100 MHz;下层为双绞线现场总线网,通讯速率为百K级。
IPMS综合平台管理系统把驾驶、损管、机舱、训练等各项舰艇自动化系统通过工业以太网连在一起,达到信息互通互连。
2006年随着特大型舰船项目的开展,船研所不失时机地把这一综合平台管理系统的技术引入了特大型舰船电力系统监控系统中。开发了STI-VC2100PN电力系统监控系统,该系统原理见图12。
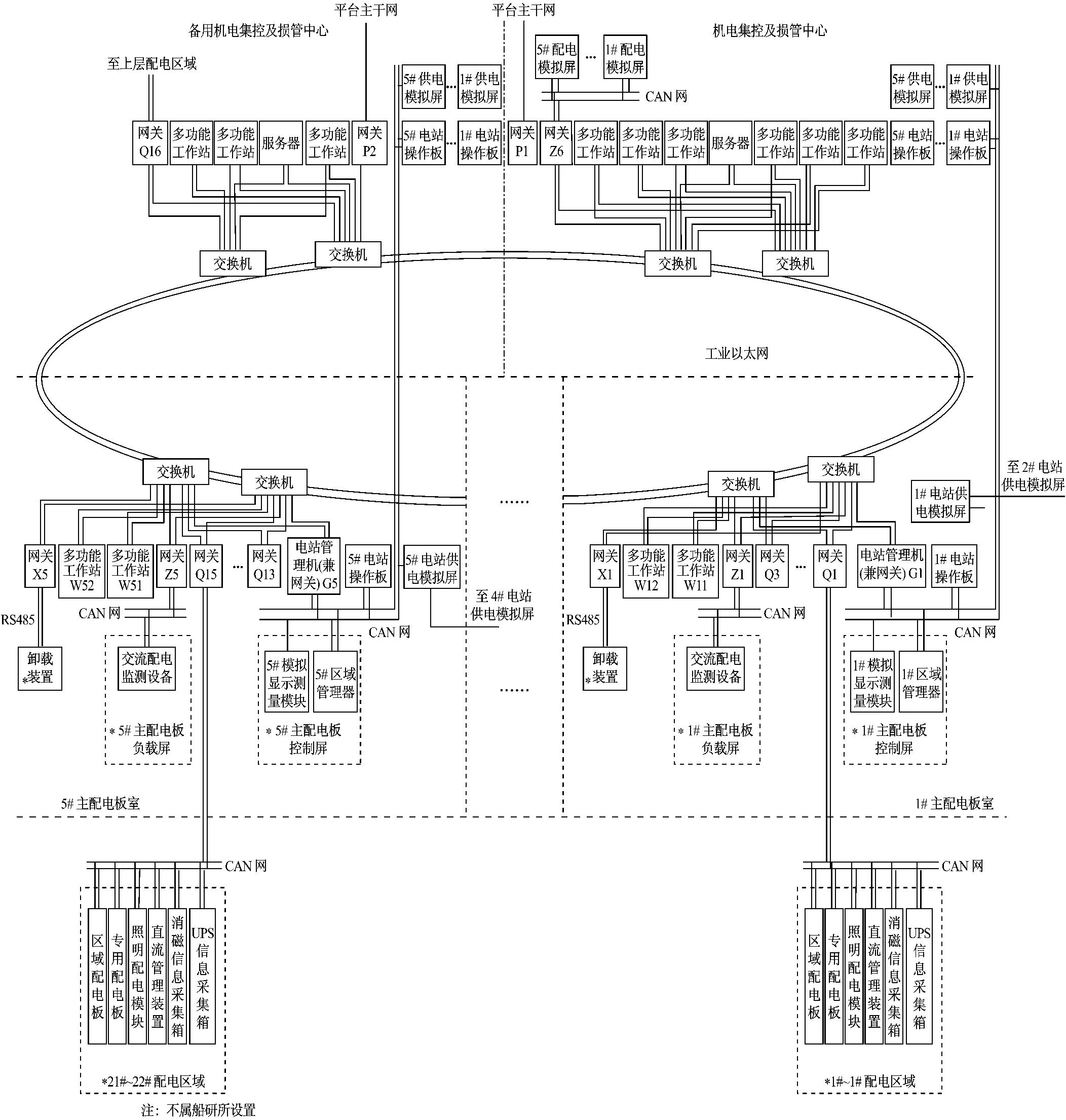
图12 STI-VC2100PN电力系统监控系统原理框图
特大型舰船的电力监控系统结构即为综合平台管理系统结构,它把特大型舰船的5个电站监控系统和24个配电区域的监控系统通过千兆以太网连在一起。
采用SRI-VC2110系列模块和舰船监控组态软件即可构成集成船舶管理系统。集成船舶管理系统与综合平台管理系统类似,区别在于一个是将民船的各个监控系统用工业以太网连在一起,一个是将军用舰船的各个监控系统用工业以太网连在一起。
由海军综合平台管理系统标准化模块构建的××6型导弹护卫舰主推进监控系统见图13。
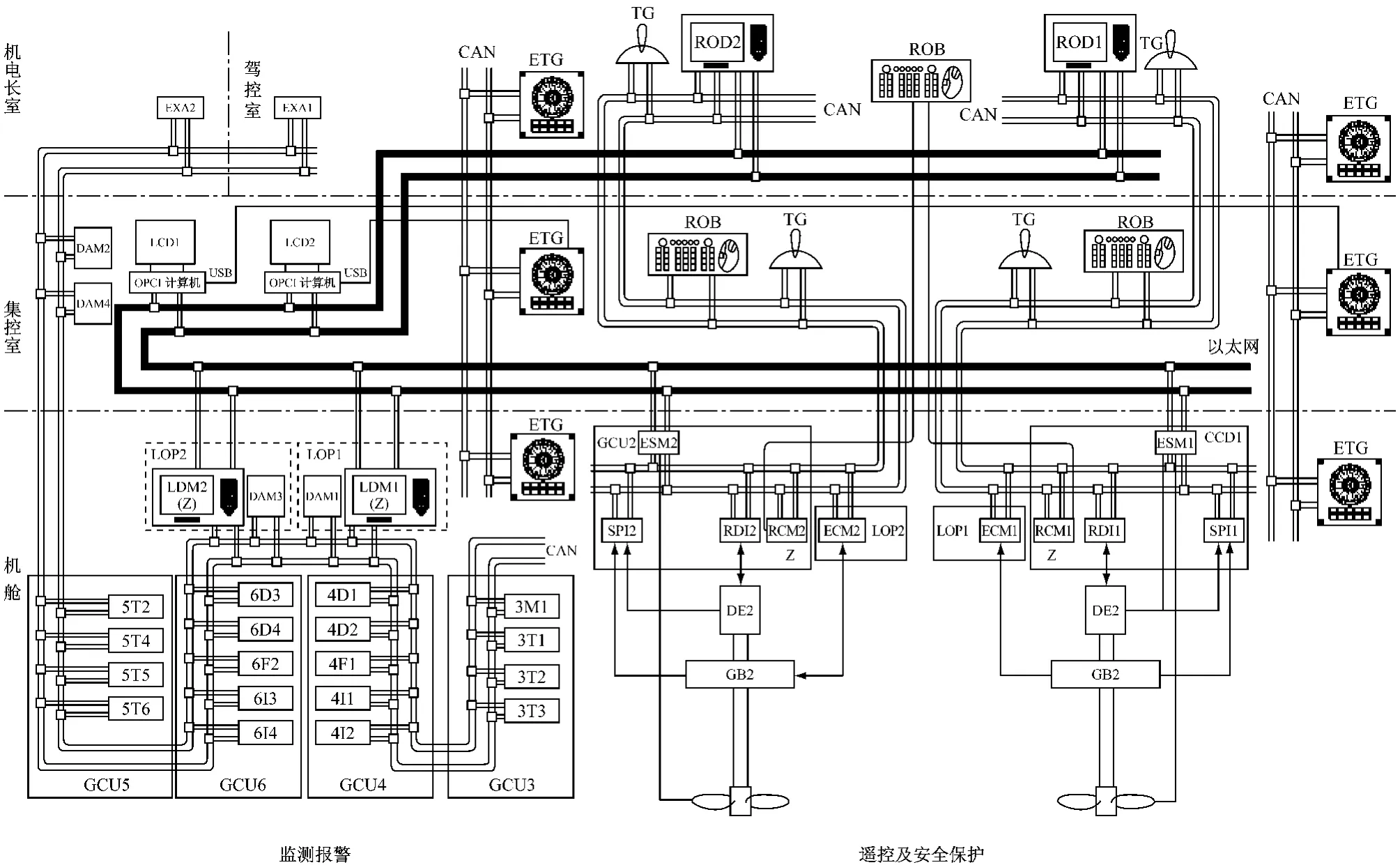
图13 轻型护卫舰主推进监控系统原理框图
该系统为船研所新近出厂的监控系统,尚未投入实际运行,有待实践检验。
4 涉足海洋工程装备自动化
世界经济的发展,陆上石油资源的枯竭,海洋能源及资源的开发现已成为世界各国的热点。海洋工程装备的发展已成为造船业发展的一个重要方面。而海洋工程装备则离不开动力定位系统。
目前海洋工程装备的自动化核心技术,基本上掌握在欧美少数国家,动力定位技术几乎被国外几家供应商所垄断。为此,船研所于2009年联合振华重工集团,在上海市经济和信息化委员会的支持下开发动力定位控制系统。经过二年多的努力,目前已研制成了SRI-VC2110DP动力定位控制系统的样机,并顺利通过了水池试验,正在进行实船试验。
动力定位控制系统是动力定位系统的核心,所以有时人们把动力定位控制系统也称为动力定位系统。动力定位是指不借助锚泊,而单独利用其自身安装的推进器保持海上位置。根据各国船级社的定义,动力定位系统应包括:动力系统、推进系统、控制系统、位置测量和传感器系统。动力定位控制系统则通常是指控制系统、位置测量传感器系统。
4.1 SRI-VC2110DP动力定位控制系统简介
SRI-VC2110DP动力定位控制系统采用自动辨识技术,专家系统控制策略,具有多种定位模式、低燃油消耗、快速响应、界面设计友好、人工操作方便、实船调试简单、配置灵活等特性。系统由SRI-VC2110系列模块组合而成。
系统主要功能有:
(1)手动操纵杆遥控;
(2)自动艏向控制;
(3)自动定位控制;
(4)自动驾驶;
(5)航迹跟踪;
(6)控制模式选择;
(7)实船训练。
SRI-VC2110DP动力定位控制系统(DP3)框图见图14。
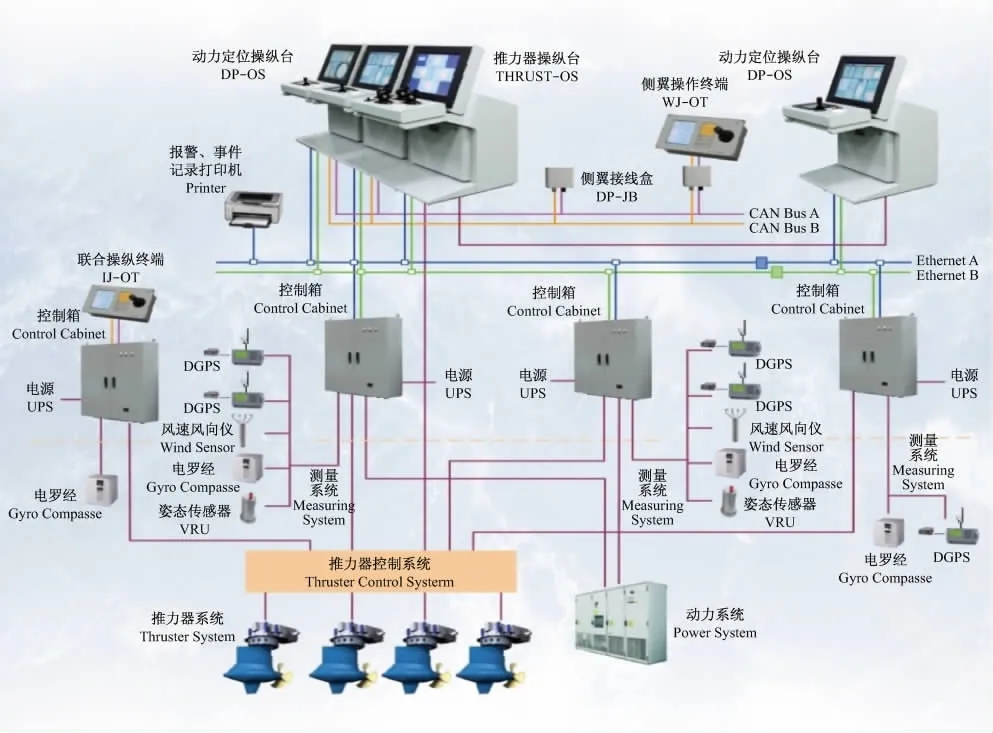
图14 SRI-VC2110DP动力定位控制系统(DP3)框图
4.2 仿真试验、水池试验
SRI-VC2110DP动力定位控制系统的性能试验以船研所为振华重工设计的、出口伊朗的2 000 t起重船为对象进行。
4.2.1 仿真试验
根据2 000 t起重船的工作条件及设计要求,编制了仿真模型,并进行数字仿真,其仿真结果见图15、图16。
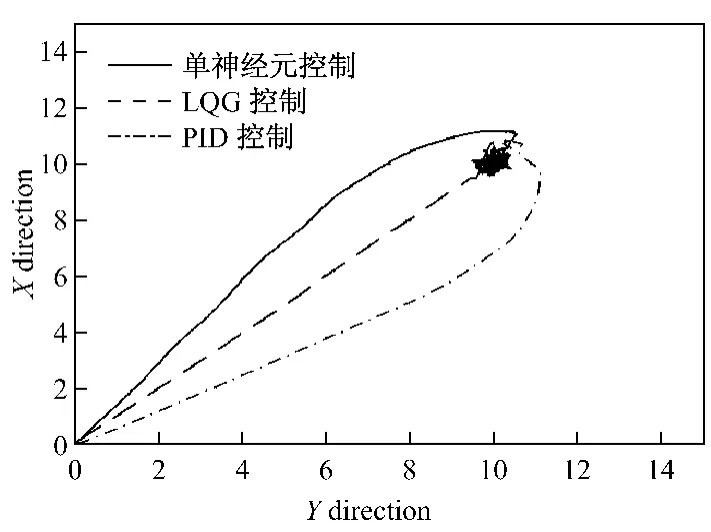
图15 动力定位船舶平面运动仿真曲线
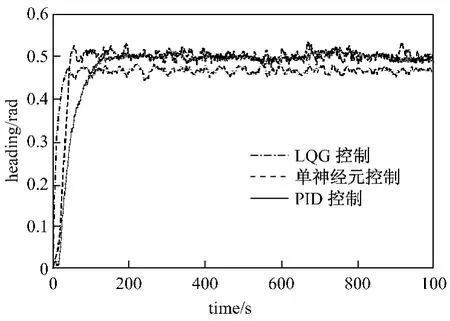
图16 动力定位船舶艏向自动控制曲线
仿真条件:风速5 m/s,流速1 m/s,风流夹角45°。
仿真结果:从仿真曲线图15可知,三种控制策略都能对船舶进行有效的位置控制。从仿真过程船舶运动路径分析,LQG控制策略能够使船按两点间直线的最优路径运动,单神经元控制策略作用下的船舶运动轨迹则有一定的超调量,而在PID控制策略作用下,船舶运动曲线弧最长,超调量也最大。
图16给出了动力定位船舶艏向控制曲线。从仿真曲线可以看出单神经元控制和PID控制的控制精度优于LQG控制,其主要原因是LQG控制对算法模型精度要求较高,模型求解误差对控制效果有较大影响。
4.2.2 水池试验
船研所运输事业部为配合动力定位控制系统的研制,专门制作了2 000 t起重船的试验船模,在船研所的风浪流水池对用于2 000 t起重船的动力定位控制系统进行了水池试验。
在规则波浪条件下风速1.5 m/s,流速0.1 m/s,风流夹角0°,有义波高0.04 m。定位精度为±0.15 m,艏向误差±3°。
在不规则波浪条件下风速2.3 m/s,流速0.15 m/s,风流夹角0°,有义波高0.04 m。定位精度为±0.3 m,艏向误差±3°。
5 新技术、新系统的开发已具备条件
5.1 柴电燃联合动力装置监控系统
为了解决舰船的吨位、航速、续航力之间的矛盾,联合动力装置是各国海军在解决动力装置问题上的一个很好的方案。近年来,世界各国海军在联合动力装置方面做出了不少的样板,如柴-柴联合动力装置、柴-燃联合动力装置,燃-燃联合动力装置以及柴-电-燃联合动力装置。我国海军与世界各国海军一样,为了解决上述矛盾已经开发了柴-柴联合动力装置、柴-燃联合动力装置,目前正在开发燃-燃联合动力装置以及柴-电-燃联合动力装置。为了满足海军的发展需要,结合船研所以往开发柴-柴联合动力装置的经验,于2011年着手开发柴-电-燃联合动力装置的监控系统。为了研究柴-电-燃动力装置监控系统的控制规律和控制策略,已于2012年9月建成了柴-电-燃联合动力装置控制系统试验室,2013年即可推出柴-电-燃联合动力装置控制系统的科研样机。柴电燃联合动力装置控制系统试验室的全貌见图17。

图17 柴电燃联合动力装置控制系统试验室
5.2 电喷柴油机控制系统
随着节能和环保要求的日益提高,电喷柴油机作为船用主机已经成为技术潮流。近年来国内各主要造机厂均引进并生产电喷柴油机,产量已相当可观。无论中速还是低速电喷柴油机,控制系统都是其不可或缺的核心组成部分。
目前电喷柴油机控制系统核心部件和控制技术均由国外厂商绝对垄断,明确表示不卖专利、不卖许可证生产,只卖特定的配套产品,而且配机调试时不允许中国技术人员在场。由于技术和市场的绝对垄断,电喷柴油机控制系统配套采购价格非常昂贵,达到整台电喷柴油机销售价格的20%以上。我国造机厂每生产1台电喷柴油机,不仅要付出许可生产的费用,还要高额采购核心配套部件和控制系统。
鉴于上述情况,船研所与沪东重机于2012-06-08签订了合作开发电喷柴油机控制系统协议。研发能用于沪东重机开发的H H M390中速柴油机及HH M34低速柴油机的电喷控制系统。船用低速电喷柴油机控制系统原理框图见图18。
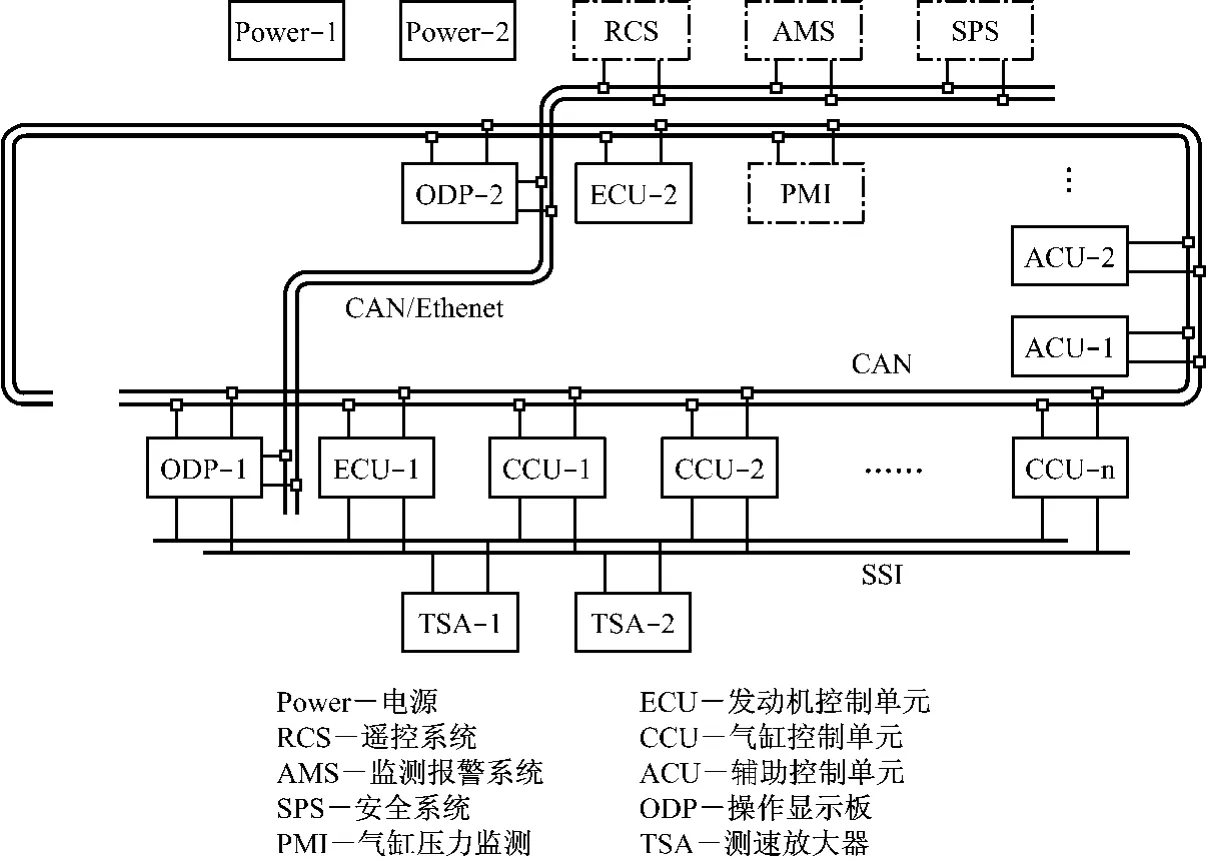
图18 船用低速电喷柴油机控制系统原理框图
6 结 语
综上所述,通过最近十多年的努力,船研所在舰船机舱自动化领域始终保持着国内领先的地位。机舱自动化技术始终处于引领国内发展的位置。我国海军长期在亚丁湾护航的舰船,都装有船研所生产的STIVC2100系列主机遥控系统、监测报警系统和电站监控系统。这些产品都经受了长期海上运行的考验。事实证明船研所生产的STI-VC2100系列机舱自动化产品质量可靠、性能优良。装有海军综合平台管理系统标准化硬件的机舱监控系统为新产品,尚未投入实际运行,有待实践检验。
尽管在民船的机舱自动化技术方面船研所仍处于优势,但由于种种原因,这些在国内领先的技术迟迟未能走进市场。随着海工装备的发展,船研所不失时机地开展海工装备自动化核心产品SRI-VC2110DP动力定位控制系统的研发,并正在形成产品,广受国人注目。国内空白的柴油机电喷控制系统也已开始立项研究。只要我们立足创新、紧跟市场,必将重获民用船舶机舱自动化市场的领先地位。
