紧急工况下的二级电压控制分区与协同建模
2012-11-09陈得宇沈继红张仁忠高世伟
陈得宇, 沈继红, 张仁忠, 高世伟
(1.哈尔滨工程大学自动化学院, 哈尔滨 150001;2.哈尔滨工程大学理学院, 哈尔滨 150001; 3.天津电力公司, 天津 300201)
紧急工况下的二级电压控制分区与协同建模
陈得宇1, 沈继红2, 张仁忠1, 高世伟3
(1.哈尔滨工程大学自动化学院, 哈尔滨 150001;2.哈尔滨工程大学理学院, 哈尔滨 150001; 3.天津电力公司, 天津 300201)
分析了正常工况下的二级电压控制控制模式应对紧急工况的不足。针对元件开断等紧急工况可能会改变原控制区域电气耦合性问题,提出了一种基于灵敏度矩阵来快速界定、划分新的控制区域的方法,进而定义了主控区域、协控区域及校验区域,并分析了在紧急工况控制中它们各自的地位、作用。针对校正控制模型建立问题,基于划分的区域提出了各区域协同建模与求解的思路,推导了建模过程中各区域并行计算灵敏度的公式,提高了建模速度。新英格兰10机39节点系统的仿真算例验证了文中所提思路、模型等的合理性。
二级电压控制; 紧急工况; 灵敏度矩阵; 控制分区; 校正控制; 协同建模
二级电压控制作为三级电压控制系统的重要环节,按照本区域无功电压的控制规律,以min为时间周期,调整区域内第一级控制装置的整定值,来跟踪第三级从全局角度定期下发的区域中枢母线电压设定值[1]。二级电压控制利用了无功电压区域特性,实现了大系统分层分区解耦控制,已在法国、意大利、比利时得到了较好应用[2,3]。二级电压控制更多是针对正常工况下无功电压控制的要求,来实现降低线损、提高电压质量等控制目标,也有研究成果提出协调二级电压控制,利用“控制自由度”来均衡发电机无功出力的分配,使发电机无功裕度较大,增强了系统应对可能发生的系统安全问题的能力[4~6]。但针对已发生的紧急工况的二级电压控制的研究相对较少[7~9]。
紧急工况是指发生负荷突变或发电机、线路元件开断等极端事件,使区域内无功分布恶劣,电压越限甚至失稳,此时无功电压控制的首要目标是尽可能快地实施有效控制,来恢复系统安全性。
试想正常工况下的二级电压控制模式是否适应紧急工况的无功电压校正控制?能否基于现有二级电压控制结构有所改进?首先,随着全国电网互联的大趋势,电气联系变得日趋紧密,为了更快速、有效校正紧急工况,是否可以不但利用本区域的控制设备,还可借助于相邻区域控制设备的协助调控,尤其是当元件开断等紧急工况发生时,它改变了网络拓扑结构,进而可能改变系统既有分区的电气耦合性,使得原有控制分区对紧急工况的调控不是最有效,更需联合其他区域的控制设备来协同调控,这是控制区域重新界定的问题。其次,在突破二级电压控制既有的控制区域局限范围后,实现联合多个区域的控制设备进行紧急工况的校正控制,在控制策略制定过程中,各个区域的地位、作用以及它们之间如何协调,进而能更提高校正控制快速性、有效性,这也是需要解决的问题之一。最终,校正控制模型的建立以及求解,这已经有一些成果[10],但如何基于已有二级电压控制框架,利用各个区域计算的独立性,采用串、并行机制来协同建模、求解,从而提高校正控制的效率,这也是值得探索的问题。
上述在二级电压控制框架体系下,论述了应对紧急工况的二级电压控制和正常工况下的二级电压控制不同之处,及存在的关键问题,本文针对这些问题分别进行了如下研究:①应对紧急工况的二级电压控制区域的划分;②校正控制模型的各区域协同建模与求解;③仿真算例验证。
1 控制区域的划分
控制区域是指当紧急工况出现时,为了保证校正控制的有效性、快速性,指定若干控制设备集优先参与校正控制,而控制设备集所在的区域为控制区域。
优先参与校正控制的设备应满足如下条件:
(1)动作同样的控制量,此控制设备对电压越限节点的校正作用大于其他控制设备;
(2)此控制设备具有较大的调控裕度。
在研究无功电压控制问题时,一般认为有功与无功的弱耦合可忽略,由快速分解法的Q-V迭代方程,有
BLΔV=ΔQ
(1)
式中,BL是有关负荷节点L(PQ节点)的导纳阵。
将发电机节点G(PV节点)增广到BL中,形成矩阵B,并对矩阵B求逆,有
B′ΔQ=ΔV
(2)
对于B′其中的BLG子阵,有
BLBΔQG=ΔVL
(3)
式中,BLG是ΔVL和ΔQG之间的灵敏度矩阵,具有阻抗量纲,表示负荷节点电压变化量ΔVL和发电机无功输出变化量ΔQG之间的关系,即把ΔQG作为控制变量,据此可快速找到满足控制区域划分条件1的系列发电机。
图1是由文献[11]研究给出的新英格兰10机39节点系统的二级电压控制分区示意。
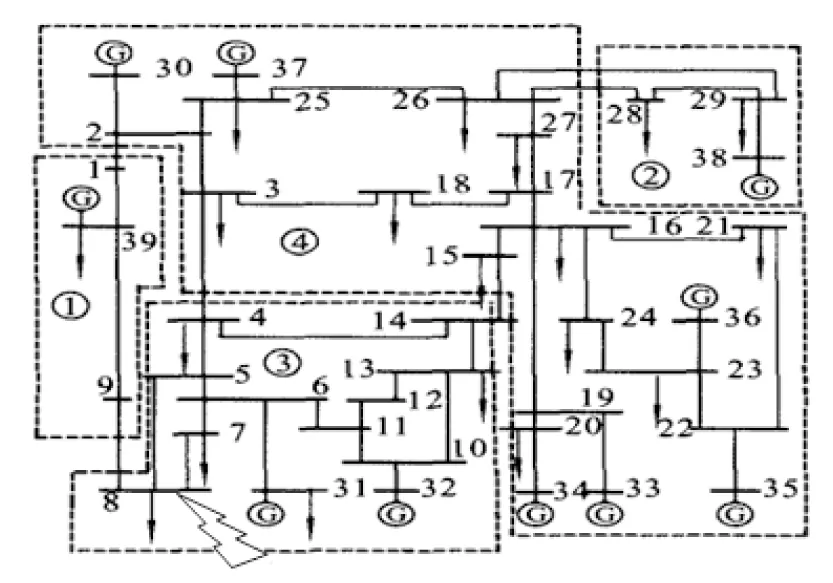
图1 新英格兰10机39节点电压控制分区示意
共分为四个区域,可分别记作areaj(j=1,2,3,4),简写为aj;对于第aj个区域内部节点集可分为负荷节点集、发电机节点集,分别记作Li(i=1,…,LN)、Gi(i=1,2,…,GN)。任意两个区域ai、aj之间的边界节点集可记作bi-j,图1中可定义节点9为区域a1、a3边界节点集b1-3;节点3、15为区域a3、a4边界节点集b3-4;其余的如b1-4为节点2,b2-4为节点26。
图中标注处是发生紧急工况所在地,且认为此地点附近的节点集bE出现电压越限,图1中紧急工况发生在区域a3的母线8附近,且母线8假定出现电压越限。
对紧急工况校正最有效的控制设备应位于距离紧急工况发生地电气距离较近的区域,本文定义此区域为紧急工况发生区域,以及与此区域有直接电气联系的区域,对应图1为区域a3,以及与a3有直接电气联系的区域有a1和a4。如果这些区域内的控制设备还无法将紧急工况校正,那么认为这类故障为极端严重故障,需采取和切负荷等配合来进行控制,不属于本文研究之列。
为了进一步确定对紧急工况最有效的发电机控制,基于式(3)的原理,分别计算紧急区域a3与相邻区域a1、a4中,紧急工况导致的电压越限节点集bE(节点8)的电压VbE对于各发电机无功输出Qg的灵敏度。
对于区域a3的发电机31、32,有
(4)
对于区域a1的发电机39,有
SbE,a1(gi)=SbE,b1-3Sb1-3a1(gi)=
(5)
由于二级电压控制已划分成区域,当紧急工况发生时,为了加快工况校正速度,信息不再上传至三级全局控制中心,那么相应的灵敏度求取也在各个二级区域分别进行,区域a1的发电机需通过与区域a3的边界节点集b1-3对越限节点集bE发生作用,所以式(5)的∂VbE/∂Vb,1-3需由区域3求取,而∂Vb,1-3/∂Qa1,gi由区域1求取,区域1和3并行计算得到式(5)的灵敏度数值。
对于区域4的发电机i(i=30,37,34,33,35,36),有:
SbE,a4(gi)=SbE,b3-4Sb3-4a4(gi)=
(6)
式(6)求解和式(5)相同,只是要注意此边界节点集b3-4包括两个节点3、15,则区域4的发电机要通过这两个节点对越限节点集起作用。从图中电气联系看出,区域4的发电机还可通过区域1,对越限节点集起作用,但本文认为跨区的这种作用较弱,可忽略。
基于式(4)~式(6)计算出的灵敏度只是从电气耦合角度来表征各个区域发电机对控制的作用,灵敏度求取不涉及到状态变量。综合灵敏度计算结果,区域ak的发电机gi对越限节点集bE的校正作用可用SbE,ak(gi)(k=1,2,…,K;i=1,2,…,GN)表示。
当越限的节点集bE为单母线(单节点),则将各个区域、各台发电机的SbE,ak(gi)(k=1,2,…,K;i=1,2,…,GN)进行排序,按照从大到小依次选择前N个SbE,ak(gi)(N为事先给定的参与校正控制的发电机台数),并对于N个SbE,ak(gi)分别确定相应的区域ak,以及相应的发电机节点gi。
当越限的节点集bE为多母线(多节点),且多条母线计为ei(i=1,2,…,N),则对于第ak个区域的gi发电机,它对越限母线集的综合校正作用可用二范数表示为
‖SbE,ak(gi)‖=[(Sb(e1),ak(gi))2+
(Sb(e2)ak(gi))2+…+(Sb(eN),ak(gi))2]1/2
(7)
排序‖SbE,ak(gi)‖(k=1,2,…,K;i=1,2,…,GN),从大到小依次选择前N个‖SbE,ak(gi)‖,并分别对于N个‖SbE,ak(gi)‖确定相应的区域ak,以及相应的发电机节点gi。
同时,在选择较大的SbE,ak(gi)或‖SbE,ak(gi)‖时,要确保所对应的发电机gi有足够的无功裕度,使之满足具备参与校正控制的条件2。
经过上述策略的选择,假定紧急区域a3的发电机gi及相邻区域a1的发电机gi入选控制设备,而相邻区域a4无设备入选。由各个区域以及其中的控制设备在校正控制中的地位、作用,将原二级电压控制区域重新定义。其中,紧急区域a1的区域控制中心一般是最先监测到紧急工况的发生,且整合、分析各个区域上传的信息,组织其余区域进行协同控制,因此紧急区域a1定义为紧急工况二级电压控制的主控区域(master control),上述协调各个区域,基于灵敏度进行控制区域划分就是主控区域的工作,在下文中即将论述的协调各区域进行校正控制的协同建模,将控制命令统一下发到各个控制设备等,都是它的进一步工作。除了紧急区域中有部分入选的控制设备,还有其余的入选控制设备,则它们所在的区域定义为协控(assistance control)区域,图1的a1为协控区域,它的作用是配合主控区域完成校正控制的建模与求解工作,同时也肩负监控下属控制设备、区域内的实时信息获取等工作。
由于各区域电气耦合变得日趋紧密,且元件开断等会改变原区域的耦合性,所以主控、协控区域控制设备的动作也可能会影响到与本区域有直接电气联系的相邻区域的电气量,在采取校正控制的同时,应校验使受到影响区域的电气量在限值范围内,如节点电压、发电机无功。所以,将受主控、协控区域的控制动作影响的区域定义为校验区域,对应图1中主控、协控区域的划分,则区域a4为校验区域。
2 紧急工况下校正控制的建模
2.1 控制模型
紧急工况下校正控制的数学模型目标函数为
(8)
并满足约束条件

(9)

式(8)和式(9)的物理含义是在满足控制量、状态变量、函数变量等约束条件的前提下(式(9)的第2~5个约束),通过最小的控制代价(目标函数式(8)),快速、有效地将越限母线集bE的电压拉回到限值之内(式(9)的第1个约束),且控制的单步调整量需满足发电机高压母线的节点电压变化量约束(式(9)的第6个约束)。将式(8)和式(9)定义为紧急工况无功电压校正控制模型式(8)。
上述的模型式(8)是从全局角度建立的理想校正控制模型,但问题的关键是如何在二级电压控制框架下,利用上一节已经划分好的、参与校正控制的主控、协控以及校正区域的独立分析、计算功能,在明确各个区域在校正控制中的地位、作用基础上,研究各个区域协同建模及求解的机制,以建模合理性、求解可靠性为前提,从而来增加处理紧急工况的效率,更大程度上保证系统的安全性。
2.2 区域协同建模
模型(8)建模的重点是在某一运行点,将状态变量(各节点电压)以及函数变量(不参与控制的发电机无功输出)线性化,即关键是状态变量、函数变量对各个控制变量(发电机等控制设备所发无功)的灵敏度。此灵敏度计算不同于第1节中的式(1)~式(3)的计算,计算中需引入解潮流得到的状态量,即用雅可比矩阵来代替B。
2.2.1 各区域潮流、灵敏度的并行计算
计算灵敏度的基础是解潮流。紧急工况下的协调控制已划分主控、协控以及校验等各个区域,各区域节点可归结为内部节点集I、与各个区域相联的边界节点集B以及相对于本区域的外部系统E,基于二级电压控制框架的实际,各个区域都具有自己的控制中心,且各区域不能得到或只能少量得到其余区域的信息。可设想以各个区域为单位,将本区域的外部系统E作适当的WARD静态等值,则各区域可形成独立的计算单元,各个区域可并行解算潮流,进而求解灵敏度,从而提高计算效率,对紧急工况的快速校正也有好处。
紧急工况下的二级电压控制是在“在线”环境下进行的,WARD等值边界节点注入功率的求取较为理想的是文献[12]提出的在线边界匹配方法,假定每个二级区域的控制中心都具有状态估计功能,对区域内采集的信息进行状态估计,能得到边界系统和内部系统节点电压,进而等值边界节点注入功率S可求出。当现场缺乏状态估计所需实测数据时,也可根据现场有限的实测信息、采用合理的假设等来简化求取此等值注入功率。
2.2.2 区域协同建模机制
各个区域并行求解潮流后,模型(8)建模的关键是求取状态变量、函数变量等对于控制变量的灵敏度。为了保证控制的快速性,紧急工况下的二级电压控制应尽量避免信息的广域传递和交互,需在二级电压控制的各个区域层面,组织已划分好的主控、协控以及校验区域进行快速、有效的协同建模。
第1节已划分出图1中母线8发生紧急工况时的主控、协控以及校验区域,仍以图1的新英格兰10机39节点为例,来论述各个区域的协同建模。
模型(8)中的约束包括各区域的越限节点集bE和非越限节点电压V、发电机(非控制设备)无功输出Q的不等式约束,求解与之相关的灵敏度并在运行点线性展开。
1)主控区域3
(10)
式中:下标(a3,gj)指代区域3不参与控制的发电机;下标(a1,gi)、(a3,gi)分别为区域1、3的控制发电机;i为区域3非越限节点;ei为区域3越限节点;主控区域3灵敏度的计算需要协控区域1的计算结果:如∂Vb,3-1/∂Qa1,gi,可由区域1并行计算得到,并将计算结果传递给式(10),表示区域1的控制发电机组gi通过边界节点集b3-1对区域3发生作用。
2)协控区域1
(11)
式中:i为区域1的节点编号,其余变量、下标含义同式(10);协控区域1的计算需要主控区域3计算结果:如∂Vb,3-1/∂Qa3,gi,可由区域3并行计算得到,将之代入式(11)中求取灵敏度,含义同式(10)。
3)校验区域4
(12)
式中:gj为区域4中发电机组编号;i为区域4中的节点编号;校验区域4的计算需要主控区域并行计算得到的∂Vb,3-4/∂Qa3,gi;需要协控区域1并行计算得到的∂Vb,1-4/∂Qa1,gi。
模型(8)的目标函数建模,综合主控、协控区域各控制变量的改变量ΔQg,有
(13)
模型(8)中的控制改变量ΔQg需满足如下的约束:
单步步长约束为

(14)
无功上/下限约束为
(15)
针对于模型(8)的各区域协同建模总结如下:式(10)~式(15)中灵敏度表达式的一部分计算可在各个区域独立开展,且通过各个区域间相互交换有关边界点集的灵敏度信息,如∂Vb,3-1/∂Qa1,gi、∂Vb,3-1/∂Qa3,gi、∂Vb,3-4/∂Qa3,gi、∂Vb,1-4/∂Qa1,gi等,将边界点集灵敏度信息代入各个区域的灵敏度计算中,从而完成各个区域灵敏度的求取。其中灵敏度计算的具体表达形式可参见文献[12],本文不再赘述。
各个区域的协同建模提高了建模速度,从而有利于控制策略的快速制定、下发、实施,对恢复系统安全是有好处的。
3 校正控制的区域划分、建模与求解流程
紧急工况发生后,控制流程如下:
(1)基于第1节控制区域划分思路,利用越限节点电压对可能纳入校正控制的各区域的发电机无功输出的灵敏度矩阵的信息划分主控、协控以及校验区域;
(2)基于第2节区域协同建模思路,各个区域并行开展WARD等值,进行并行潮流计算,协同求取模型(8)建模所需要的灵敏度系数;
(3)将各个区域负荷节点(或少数代表性节点)以及发电机(非控制设备)线性化所需的灵敏度系数、负荷节点(或少数代表性节点)的电压实测值、发电机节点的无功实测值以及节点电压上/下限、发电机无功上/下限约束等少量信息传递到主控区域的控制中心,在控制中心完成模型(8)的完整建模;
(4)模型(8)是二次规划模型,利用合理的算法求解控制变量,即参与控制发电机组的无功改变量ΔQg;
(5)将ΔQg下发至主控、协控区域各个控制发电机,发电机按照下发整定值动作;
(6)但运行实际需要考虑发电机无功调节的单步最大步长,所以限于调控步长的限制,如一次无法完成紧急工况的校正,则需分解成多次下发控制解。
4 仿真算例
仍以图1新英格兰10机39节点系统为例,对提出的思路及建模、求解方法进行仿真验证,此系统功率基准值为100 Mvar,系统其余有关参数见文献[12]。
假定系统区域3发生如下紧急工况:线路6-11开断的同时,节点7、8的负荷快速攀升,节点7由原来的233.8 MW、84 Mvar升至333.8 MW、184 Mvar;而节点8由原来的522 MW、176 Mvar升至622 MW、376 Mvar,区域3可称作紧急区域。
此时区域3的部分节点集发生电压越下限,如表3所示。

表1 越限节点电压
从图1可看出,紧急工况引发的电压越限的节点集具有区域特性。
4.1 控制区域划分
需找到能保证快速、有效将越限节点8、7、5的电压拉回至正常值范围内的控制发电机,并将其纳入控制体系。由于线路6-11的开断改变了区域间的电气耦合性,更有效的控制可能存在区域3之外,且为了快速消除紧急工况,也有充分利用相邻区域控制设备的必要性,所以要注意相邻区域的控制设备对紧急工况校正的作用。
表2给出了紧急工况发生前后,由灵敏度表征的各区域控制设备对节点电压越限消除的作用,此灵敏度与系统状态变量无关,仅仅是由电气耦合特性决定的。

表2 越限节点电压对发电机无功输出的灵敏度
从表中可看出,对越限节点集7、8、5调控作用较明显的是发电机31、39、32,且对比线路6-11开断前后它们的灵敏度大小变化。在开断前,发电机32对节点集8、7、5的综合调控作用(灵敏度大小)要优于发电机39;而线路6-11的开断改变了电气耦合特性,发电机39对越限节点集的综合调控作用反过来要优于发电机32。从图2中也可直观看出,线路6-11开断将发电机32相对于越限节点集的电气距离拉远了,相比较而言,紧急区域3相邻区域1的发电机39距离越限节点集电气距离更近了,从而使调控更有效。所以,在紧急控制中需将暂时打破既有的二级电压控制区域,联合其他区域进行协助控制,这将更有助于校正紧急工况的效率、效果。表2中灵敏度计算可参见式(4)~式(7),且各区域可协同计算,从而提高效率。
节点7、8无功负荷需求的快速增长导致系统缺乏无功,所以重新划分的控制区域内的发电机要有一定的无功储备来供调用(为了简化起见,只考虑无功上限的裕度),表3列出调控主力机组31、39、32的无功上界以及当前无功运行点,进而得到各机组的无功裕度。

表3 发电机无功裕度
本文假定此次紧急工况的消除至少需要100 Mvar的无功裕度(实际中可凭运行经验判断)。
基于第1节控制区域划分思路,综合表2调控灵敏度的大小顺序以及表3的发电机无功裕度,重新定义控制区域,参与此次校正控制共需两台发电机组31、39,分别分布在紧急区域3和与之相邻的区域1中,则区域3可定义为主控区域;而区域1可定义为协控区域。同时,发电机39、31校正紧急工况时的频繁、较大幅度的调控以不违反与主控、协控区域有直接电气联系区域4的运行约束为原则,所以定义区域4为校验区域,区域4分布范围较大,可适当选择其中的典型节点、主要发电机节点进行电压、无功输出上下限约束的校验即可。
4.2 校正控制的各区域协同建模与求解
已划分出主控区域3、协控区域1、校验区域4,按照第3节的各区域协同建模、求解流程,来建立完整校正控制模型(8),可参照式(10)~式(15)已给出的模型(8)的线性化公式。
对于主控区域3:区域a3的发电机31可简写为(a3,g31),则(a3,g31)是主控区域的控制机组;(a3,g32)是非控制机组;(a3,b(ei))为越限节点,分别为节点8、7、5,(a3,i)为除了越限节点集的所有负荷节点,且协控区域a1的发电机39通过边界节点集b3-1(节点9)对区域3发生作用。
对于协控区域1:(a1,g39)是协控区域1的控制机组;(a1,i)(i=1)为负荷节点,而节点2、9是区域1和区域4、区域3的边界节点b1-4、b3-1,由于是边界节点,起到各个区域的联系作用,根据其在各个区域作用的不同,可将其处理为负荷节点,也可处理为发电机节点,如此有利于灵敏度的求取。
对于校验区域4:(a4,gi)(i=30,37,34,33,35,36)都为非控制发电机组;(a4,i)为负荷节点,其中节点3、15为区域4、3的边界节点集b3-4。
根据上述各区域的控制发电机节点、负荷节点、非控制发电机节点、边界节点、越限节点等的确定,即可按照式(10)~式(15)以及第3节给出的区域协同建模、求解流程来建立完整的模型(8)。
紧急工况发生后,各区域控制中心进行区域外部系统的WARD等值,各个区域经过外部系统等值后解耦,可并行计算求解潮流及模型(8)中线性展开的灵敏度系数。
表4列出主控区域3的部分节点潮流解,限于篇幅,其余各区域并行计算的潮流解不逐一列出。
表5列出主控区域3的部分节点电压对于本区域的发电机31无功输出、区域1的发电机39无功输出的灵敏度,计算公式见式(10)中的第2式。

表4 区域3部分节点潮流解
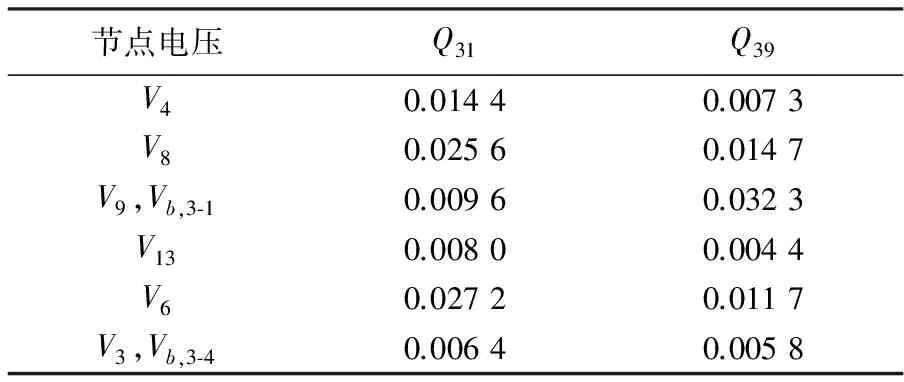
表5 节点电压对于发电机无功输出灵敏度S
表中第二列各行为区域3各节点电压相对于区域1发电机39无功输出灵敏度计算值,此计算需由区域1提供边界节点电压Vb,3-1对发电机39的Qa1,g39的灵敏度,此数值是由区域1并行计算传递给区域3的,具体数值见表格中第二列。
表6列出主控区域3的非控制发电机32的无功输出对于区域3的发电机31、区域1的发电机39无功输出灵敏度,计算公式见式(10)中的第3式。

表6 发电机无功输出之间的灵敏度S(非控制设备对于控制设备)
表中第二行为区域3的发电机32无功输出对于区域1发电机39无功输出灵敏度计算值,此计算也需由区域1并行计算得到的边界节点电压Vb.3-1对发电机39的Qa1,g39的灵敏度。

表7给出优化得到的控制发电机组31、29的控制改变量。
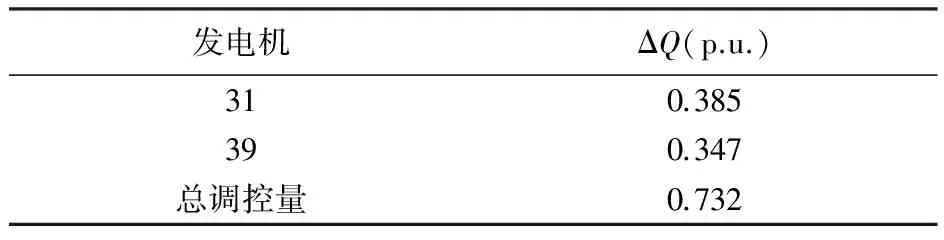
表7 控制发电机组的无功输出改变量
发电机无功控制总调控量为0.732 p.u.。但鉴于无功最大调整步长为0.3 p.u.,所以分两步将控制策略解下发并执行,下图给出节点8、5、7经过两步控制策略后的校正效果,越限最严重的节点8已达到合格的下限值0.95 p.u.,且在两步控制过程中,各区域节点电压、非控制发电机组的无功输出没有出现越上/下限的情况。图2给出按本文方法进行校正的控制效果。

图2 按本文方法进行校正的控制效果
如不进行控制区域的重新组织,发生的紧急工况仅依靠所在区域3的发电机组来应对,即发电机组31、32来进行校正控制。假定其余的灵敏度计算、校正控制建模都同本文所述,图3给出按原控制分区的校正控制效果。
如不重新进行控制分区,发电机组31、32参与校正控制,则需经过三步才能将节点电压控制到合格范围内,且发电机无功控制总调控量为1.275 p.u.,比采用控制分区的0.732 p.u.多0.543 p.u.(54.3 MW)。
从图2、图3的对比可看出,本文采用的重新划分控制区后的紧急工况下的二级电压控制具有一定优越性,且本文提出的各区域协同建模及求解机制也加快了校正控制建模、求解速度,有利于系统恢复稳定。

图3 按原控制分区的校正控制效果
5 结语
本文分析了正常工况下二级电压控制模式应对紧急工况电压控制的不足。提出了一种利用灵敏度信息来快速划分新控制区域的方法,组织新控制区域的控制设备进行控制,避免了紧急工况改变电气耦合特性后,原控制区域的控制设备控制效果不足的缺点;重新界定、划分了紧急校正控制的主控、协控以及校验区域,明确了在校正控制中各区域的地位、作用;在此基础上,针对校正控制模型的建立,提出了各区域协同建模及求解的思路,加速了校正控制建模与求解的效率。结合新英格兰10机39节点系统的仿真算例,验证了本文所提思路、模型等的合理性。
[1] Paul J P, Leost J Y, Tesseron J M. Survey of the secondary voltage control in France: present realization and investigations[J]. IEEE Trans on Power Systems, 1987, 2(2): 505-512.
[2] Arcidiacono V, Corsi S, Natale A,etal. New developments in the applications of ENEL transmission system automatic voltage and reactive control[R]. Paris: CIGRE, 1990.
[3] Piret J P, Antoine J P, Stubbe M,etal. The study of a centralized voltage control method applicable to the Belgian system[R]. Paris: CIGRE, 1992.
[4] Vu H, Pruvot P, Launay C,etal. Improved voltage control on large-scale power system[J]. IEEE Trans on Power Systems, 1996, 11(3): 1295-1303.
[6] 孙元章, 王志芳, 姚小寅(Sun Yuanzhang, Wang Zhifang, Yao Xiaoyin). 电力系统二级电压控制的研究(Study on secondary voltage control of power system)[J]. 电力系统自动化(Automation of Electric Power Systems), 1999, 23(9): 9-14.
[7] 盛戈皞, 江秀臣, 涂光瑜, 等(Sheng Gehao, Jiang Xiuchen, Tu Guangyu,etal). 基于多Agent的二级电压紧急优化控制方法(Optimal method for emergency secondary voltage control based on multi-agent technology)[J]. 电力系统及其自动化学报(Proceedings of the CSU-EPSA), 2005, 17(5):1-6,49.
[8] 陈中, 杜文娟, 王海风, 等(Chen Zhong, Du Wenjuan, Wang Haifeng,etal). 电压稳定后紧急控制多代理系统框架(Framework of multi-agent system in post-emergency voltage stability control)[J]. 电力系统自动化(Automation of Electric Power Systems), 2006, 30(12):33-37.
[9] 李海峰, 王海风, 陈珩(Li Haifeng, Wang Haifeng, Chen Heng). 紧急情况下二次电压的多代理协调控制(Multi-agent based secondary voltage coordination control in power system contingencies)[J]. 电力系统自动化(Automation of Electric Power Systems), 2001, 25(24):17-21.
[10]赵晋泉, 江晓东, 张伯明(Zhao Jinquan, Chiang Xiaodong, Zhang Boming). 一种基于连续线性规划技术的在线静态安全校正算法(A successive linear programming based on-line static security corrective control approach)[J]. 电网技术(Power System Technology), 2005, 29(5):25-30.
[11]范磊, 陈珩(Fan Lei, Chen Heng). 二次电压控制研究(一)(Study of secondary voltage control part one: structural model and nested clustering algorithm)[J]. 电力系统自动化(Automation of Electric Power Systems), 2000, 24(11):18-21.
[12]张伯明, 陈寿孙, 严正. 高等电力网络分析[M]. 北京: 清华大学出版社, 2007.
陈得宇(1974-),男,博士研究生,主要从事智能体(Agent)技术在电力系统中应用,大系统建模、控制及辅助决策支持系统等研究。Email:chen_power@163.com
沈继红(1966-),男,教授,博士生导师,研究方向为复杂系统建模与仿真等。Email:shenjihong@hrbeu.edu.cn
张仁忠(1952-),男,教授,研究方向为系统工程理论与应用。Email:zhangrenzhong@hrbeu.edu.cn
PartitioningandCollaborativeModelingoftheSecondaryVoltageControltoRespondtoEmergencyConditions
CHEN De-yu1, SHEN Ji-hong2, ZHANG Ren-zhong1, GAO Shi-wei3
(1.College of Automation, Harbin Engineering University, Harbin 150001, China;2.College of Science, Harbin Engineering University, Harbin 150001, China;3.Tianjin Electric Company, Tianjin 300201, China)
The lack of response to emergency conditions of secondary voltage control mode in normal operating conditions is analyzed. Considering that N-1 outages and other emergency operating conditions may change the electrical coupling of the original control area, the method based sensitivity matrix to quickly define and partition new control area is presented for the problem. Thus master control area, assistance control area and validation area are defined, and their respective status and role are analyzed in control of an emergency condition. Based on the partitioning the multi-area collaborative modeling and solving ideas are presented for the corrective control model, parallel sensitivity formula is derived to improve the speed of modeling in modeling process. Case studies on New England 10-machine 39-bus show that the proposed idea and model are reasonable.
secondary voltage control; emergency conditions; sensitivity matrix; control partitioning; corrective control; collaborative modeling
TM74
A
1003-8930(2012)01-0125-09
2010-05-12;
2010-07-14
