具有鲁棒容错特性的网络化二级电压控制
2012-11-09盛戈皞刘亚东江秀臣
盛戈皞, 刘亚东, 江秀臣
(上海交通大学电子信息与电气工程学院, 上海 200240)
具有鲁棒容错特性的网络化二级电压控制
盛戈皞, 刘亚东, 江秀臣
(上海交通大学电子信息与电气工程学院, 上海 200240)
根据二级电压控制的原理和网络传输的特点,建立了同时考虑不确定信息延迟、数据包丢失和乱序的网络化二级电压控制NSVC(networked secondary voltage control)模型,运用线性矩阵不等式LMI(linear matrix inequality)方法设计了具有鲁棒容错特性的二级电压控制器,能保证控制系统在网络环境下具有良好的控制性能和稳定性。以经典3机系统为例进行数字仿真,验证了该网络化二级电压控制器的性能和效果。
二级电压控制; 鲁棒控制; 容错控制; 网络控制系统; 不确定传输延迟
二级电压控制从区域(或全局)的角度出发,以快速协调的方式设置一级电压控制器的参考值,是维持系统电压稳定,提高系统安全运行水平的重要手段[1~6]。从控制系统结构来说,二级电压控制是地理上分布较为广阔的广域控制系统,需要多路远方数据采集和通讯设备,是典型的广域分布式控制系统,从长远来看,随着智能电网的建设和发展,电力数据信息网络日趋完善且控制系统规模的日益扩大,为了提高控制系统的灵活性和可靠性,这种广域分布的实时控制系统信息和数据将逐步发展到标准数据信息网络上传输,形成网络化二级电压控制NSVC(networked secondary voltage control)[7~9]系统。
网络控制系统的复杂性是由网络自身特点造成的,主要在于[10,11]:①网络环境下多用户共享通信线路且流量变化不规则;②传输数据流经众多计算机和通信设备且路径不唯一;③数据单元在传输中存在网络阻塞、连接中断等情况。这些原因会产生不确定的数据传输延迟、数据包丢失、数据时序错乱等现象,使网络中传输的信息处在动态不确定时变环境中。
近年来,研究者主要考虑固定时滞或利用时滞的统计特性设计鲁棒控制器[12,13]。文献[14]将网络传输延迟转化为固定传输延迟设计延迟控制器,但是基于最大延迟设计,难以取得优化的控制性能。
本文考虑网络诱导的不确定性数据延迟,将测量信息或控制信息数据包乱序、丢失视为现场数据采样装置(传感器节点)或一级电压控制器(执行器节点)暂时性失效,建立网络化二级电压控制模型,运用线性矩阵不等式LMI(linear matrix inequality)方法设计NSVC鲁棒容错控制器,确保NSVC闭环系统对网络传输造成的时滞不确定具有鲁棒性,对数据包乱序、丢失等异常情况具有完整性。
1 问题描述
1.1 二级电压控制模型
一般情况下,二级电压控制器的设计仅需考虑电力系统的无功电压特性,其基本原理如图1所示。考虑系统在平衡点附近控制,图中:ΔVG为无功控制设备节点的电压变化向量;ΔVP为控制区域主导节点的电压变化向量;ΔQG为无功设备节点的无功变化向量;QREF和VREF为控制器参考设定值。

图1 二级电压控制基本原理示意
设定系统的控制向量u=ΔVG,状态向量x=(ΔVP,ΔQG),则考虑控制系统噪声,不考虑传输延迟时,整个二级电压控制系统的动态特性可用状态方程来描述[2],即
(1)
式中:xk为k时刻状态量;uk为k时刻控制量;yk为k时刻控制反馈的输出量,这里包括所有可测得的状态变量;γk和υk为随机噪声;不考虑一级电压控制的动态行为,可认为A=0;B的大小由主导节点与控制设备之间以及控制设备本身无功对电压的灵敏度矩阵决定[15];R为噪声系数矩阵;C为对角矩阵,C中的元素Cii为1或0,为1时表示对应的状态量可测得。
目前应用二级电压控制器模型主要有基于线性反馈控制规律[1~3]和基于优化算法的协调控制两类[5]。本文考虑采用传统的线性反馈控制规律,k时刻的控制量可表示为
uk=-KCxk
(2)
式中K为控制增益矩阵,决定闭环控制时间常数。
1.2 网络化二级控制电压系统
网络化二级电压控制系统采用数据网络传输实时监测数据和控制信息,基本结构如图2所示。
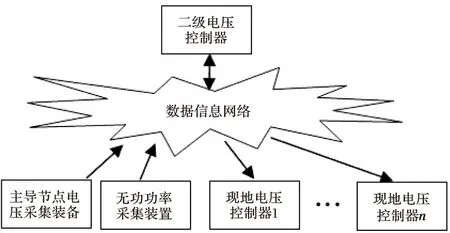
图2 网络化二级电压控制系统结构示意
由于控制器和采集装置之间、控制器和执行装置之间均通过网络传输信息,受网络承载能力和网络传输机制的影响,不可避免地会产生传输延迟。为了对这种闭环网络控制系统进行数学建模,首先对系统做如下合理的假设:①主导节点电压和无功功率数据采集装置(传感器节点)、二级电压控制器(控制器节点)和二级电压控制现地执行装置(执行器节点)均采用时间驱动的方式,采样周期为T,这可以通过GPS时钟同步信号实现;②二级电压控制器的处理时间相对于采样周期来讲可以忽略不计;③每个传感器节点的数据为单包传输,传感器采样数据信息包含有采样时刻的信息和节点标识,这可以通过在采样信号后面附加一时间标志来实现;④每个周期内控制系统的传输最大延迟时间是有上界的,且不大于采样周期。
在以上假设的前提下,本文考虑通信延迟的情况,进行二级电压控制器的设计,控制回路的基本结构如图3所示。

图3 网络化二级电压控制系统传输延迟示意
根据假设,在采样时刻,所有传感器同时进行采样,并将采样数据与节点标识组成数据包,然后尝试向网络发送数据。若在时间T内仍没有成功发送数据,则放弃该数据,在新的周期到来后再次采样和传输。控制器节点在接收到传感器数据后,将数据存储到特定的缓存;在计算时刻到来时,利用缓存中的数据计算控制量,然后清空缓存。
根据图3,第k个控制周期控制回路总的时间延迟为
(3)


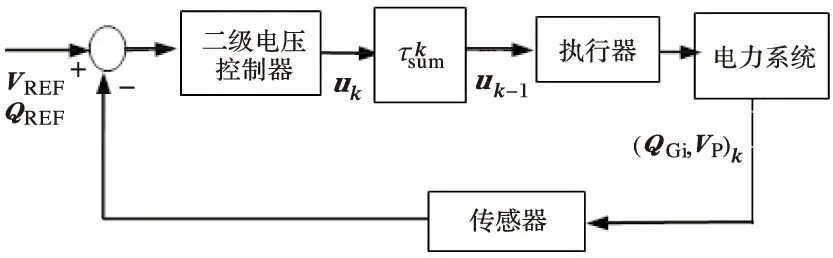
图4 考虑传输延迟的网络化二级电压控制系统等效结构
2 考虑丢包和延时的网络化二级电压控制模型
综合考虑网络诱导时延、数据包丢失等因素建立的NSVC系统模型,模型主要考虑借助鲁棒容错控制和切换系统的理论,一方面考虑网络诱导的不确定性数据延迟,另一方面将测量信息或控制信息数据包乱序、数据丢包视为数据采样装置(传感器节点)或一级电压控制器(执行器节点)暂时性失效。一个二级电控制区域一般包括1个主导节点和多个控制设备,本文主要考虑二级电压控制器到执行器节点数据传输失效的情况。
实际系统中, 由于环境噪声、缓慢变化的电力系统运行参数以及未知的不确定性等,很难获得NSVC的精确数学模型。综合考虑第1.2节所描述的网络传输延迟造成控制器和执行器之间的不同步(假设最多一个采样控制周期),建立具有不确定性的NSVC离散控制系统模型为
xk+1=Axk+(B0+ΔB0)uk+
(B1+ΔB1)uk-1+Rγk
(4)
式中:xk是状态向量;uk是控制输入向量;A是系统的状态矩阵;B0和B1是常数矩阵,可由二级电压控制系统离散化模型推出;ΔB0和ΔB1是反映不确定网络时延的未知实数矩阵,假定其范数有界,由于ΔB0和ΔB1有界,假定其具有的形式[16]为
[ΔB0ΔB1]=DFk[E0E1]
(5)

由以上分析,考虑系统的不确定性和网络传输延迟,NSVC闭环系统模型描述为
xk+1=Axk+(B0+DFkE0)uk+
(B1+DFkE1)uk-1+Rγk
(6)
由于控制器采用状态反馈
uk=Kxk
(7)
则模型转化为
xk+1=Axk+(B0+DFkE0)Kxk+
(B1+DFkE1)Kxk-1+Rγk
(8)
根据完整性容错控制的思想,设计一个鲁棒控制器,使系统在正常和数据包丢失的情况下该控制器都能保持系统稳定或获得良好的控制性能。本文主要考虑控制器输出数据可能丢失的情况(对应执行器失效)下系统的完整性设计,引入开关矩阵
L=diag{L1,L2,…,Lm}
L≠0且L∈Ψ
(9)
式中:Ψ表示所有可能的执行器失效开关矩阵L的集合;m是至执行器的数量;Li=1,第i个执行器正常;Li=0,第i个执行器失效;i= 1,2 ,…,m。
在控制器与执行器之间引入开关矩阵L后,NSVC闭环模型为
xk+1=(A+B0KL+DFkE0KL)xk+
(B1L+DFkE1L)Kxk-1+Rγk
(10)
基于上述模型和时延假设条件,NSVC系统控制设计的工作核心在于:确定控制器增益K,使系统(10) 在任意开关矩阵L∈Ψ下是渐近稳定的。
3 网络化二级电压鲁棒容错控制器设计
3.1 控制规律的设计方法
运用线性矩阵不等式(LMI)方法进行NSVC控制器的设计,使得NSVC闭环系统对于所有允许的不确定时滞以及执行器暂时失效的情况,在任意切换下是全局渐近稳定的,即闭环系统对网络诱导的时滞不确定性具有鲁棒性,在执行器暂时失效时具有完整性。
定理1考虑网络控制系统闭环模型,对于所有的传感器失效矩阵Li∈Ψ和一致正常数α以及给定的矩阵Y,如果存在正定对称矩阵X和Z,使线性不等式
(11)
成立,则执行器失效时闭环系统(10) 仍保持渐近稳定。其中:V1=AX+B0LY;V2=-X+αDDT。
若取状态反馈控制增益矩阵K=YX-1,则闭环系统(10)在执行器失效的情况下是渐进稳定的,即构成对不确定网络诱导时延具有鲁棒性且对执行器暂时失效不敏感的鲁棒容错反馈控制器。该定理可由Lyapunov稳定性理论和Schur补引理证明[17]。
3.2 控制系统的实现
基于上述理原理和方法,本文提出的NSVC二级电压控制系统的基本实现方案如图5所示。

图5 NSVC实现方法

由第3.1节所述,鲁棒容错控制器增益k的设计步骤描述如下:
步骤1选取合适的正实数α和正定矩阵Y。
步骤2通过Matlab LMI工具箱求解线性矩阵不等式(11) 获得对称正定解X。若无解,重新选择正实数α和Y,重复步骤1和2。
步骤3根据Y和X的可行解获得具有鲁棒容错特性的状态反馈控制增益矩阵K=YX-1。
4 数字仿真

在系统参数和运行条件均相同的前提下,采用基于网络传输的二级电压控制方案,二级电压控制器和数据采集装置以及执行装置之间均采用数据网络进行信息交换。方案1装设常规二级电压控制器,控制规律和控制参数参阅文献[1],控制采样周期取为2 s;方案2采用本文提出的鲁棒容错的网络化二级电压控制策略。系统仿真分别考虑整定值变化和负荷变化两种条件,给出不同控制方案的响应情况。

图6 经典3机系统
NSVC系统控制向量u为[ΔVG1ΔVG2]T,系统状态向量x为[ΔVB8ΔQG1]T。鲁棒容错控制器的设计基于第3节描述的方法,给定的参数为

Fk=sin(0.05k)I
根据定理1,选取合适的正实数α(本文选取α=1),通过Matlab线性矩阵不等式工具箱feasp求解器,验证线性矩阵不等式(11),得到满足线性矩阵不等式的可行解X和Y,进而求得鲁棒容错控制器的增益矩阵K=YX-1。
在系统仿真过程中:考虑数据网络存在随机传输延迟,假设最大延迟时间不超过一个采样周期2 s;计算机数据网络传输的仿真采用Matlab/Simulink的TrueTime工具箱实现;系统的动态过程不考虑一级电压控制器的动态行为,依次对每一个采样控制步骤解潮流方程,每一次的初始条件为上一控制步骤的结果。
4.1 算例1
假设负荷情况不变,10 s时将二级电压控制器的主导节点电压设定值由1.01下降为0.98,主导节点B8的电压响应曲线如图7所示。可见,由于传输延迟的影响,未考虑传输延迟的传统二级电压控制器主导节点的电压经过较长时间的波动后逐渐恢复到设定值,曲线中较大的振动幅值主要是因较大的传输延迟引起,而存在随机变动的部分是由延迟的随机性而诱导的;考虑了网络传输延迟的新型二级电压控制器可以较快稳定到新的设定值。

图7 算例1主导节点B8电压响应曲线
4.2 算例2
假设系统负荷变化情况以及控制系统的配置和算例1一样,考虑最严重的数据包丢失情况,分别考虑二级电压控制器发给发电机1AVR(执行器1)和发给发电机2AVR(执行器2)的控制信号丢失,系统响应情况如图8所示。图中:1表示正常情况下(L=diag{1,1})的响应曲线,2表示发电机1的控制信号丢失即执行器1失效(L=diag{0,1})的响应曲线,3表示执行器2(L=diag{1,0})的响应曲线。

图8 算例2主导节点B8电压响应曲线
从图8可以看出:当同时考虑不确定数据传输延迟和控制信号数据包丢失时,本文设计的鲁棒二级电压控制器能仍能保证系统响应的稳定,具有较好的容错特性。
5 结语
基于网络实现电力系统广域控制是电力系统控制的发展方向之一。本文将网络控制引入二级电压控制,建立了考虑网络通信延迟和数据包丢失的二级电压控制的模型,运用LMI方法设计了具有鲁棒容错特性的基于网络传输的二级电压控制器,仿真结果证明了本文所述方法对于受网络不确定时延和不同步影响的网络化二级电压控制系统在执行器发生失效故障时具有鲁棒完整性。
[1] Paul J P, Leost J Y, Tesseron J M. Survey of the secondary voltage control in France: Present realization and investigations[J]. IEEE Trans on Power Systems, 1987, 2(2):505-512.
[2] Marinescu B, Bourles H. Robust predictive control for the flexible coordinated secondary voltage control of large-scale power systems[J]. IEEE Trans on Power Systems, 1999,14 (4): 1262-1268.
[3] Corsi S, Pozzi M, Sabelli C,etal. The coordinated automatic voltage control of the Italian transmission grid-Part I: Reasons of the choice and overview of the consolidated hierarchical system [J]. IEEE Trans on Power Systems, 2004, 19(4): 1723-1732.
[4] 方鸽飞,刘君华,吕岩岩 (Fang Gefei, Liu Junhua,Lü Yanyan). 基于树形分布的电压控制分区(Tree form distribution based network partition for voltage control) [J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2007,19(1):83-86,127.
[5] 郭庆来,孙宏斌,张伯明,等(Guo Qinglai,Sun Hongbin, Zhang Boming,etal). 协调二级电压控制的研究(Study on coordinated secondary voltage control)[J]. 电力系统自动化(Automation of Electric Power Systems),2005,29(23):19-24.
[6] 盛戈皞,江秀臣,涂光瑜,等(Sheng Gehao, Jiang Xiuchen,Tu Guangyu,etal).基于多Agent的二级电压紧急优化控制方法( Optimal method for emergent secondary voltage control based on multi-agent technology)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2005,17(5):1-6,49.
[7] Tomsovic K, Bakken D E, Venkatasubramanian V,etal. Designing the next generation of real-time control, communication, and computations for large power systems [J]. Proceeding of the IEEE , 2005, 93(5): 965-979.
[8] 江道灼,申屠刚,李海翔,等(Jiang Daozhuo, Shen Tugang, Li Haixiang,etal). 基础信息的标准化和规范化在智能电网建设中的作用与意义(Significance and roles of standardized basic information in developing smart grid)[J]. 电力系统自动化(Automation of Electric Power Systems), 2009,33(20):1-6.
[9] 段献忠,何飞跃,辛建波,等(Duan Xianzhong, He Feiyue, Xin Jianbo,etal). 基于信息网络综合传输的电力系统运行与控制(Integrative information transmission based operation and control for power system)[J]. 电网技术(Power System Technology), 2004,28(9):38-41.
[10]Nesic D, Teel A R. Input-output stability properties of networked control systems[J].IEEE Trans on Automatic Control, 2004, 49(10): 1650-1667.
[11]Walsh G C, Ye Hong, Bushnell L G. Stability analysis of networked control systems [J].IEEE Trans on Control Systems Technology, 2002, 10(3): 438-446.
[12]江全元,邹振宇,曹一家,等(Jiang Quanyuan, Zou Zhenyu, Cao Yijia,etal). 考虑时滞影响的电力系统的稳定分析和广域控制(Overview of power system stability analysis and wide-aera control in consideration of time delay )[J]. 电力系统自动化(Automation of Electric Power Systems), 2005,29(3):1-7.
[13]袁野,程林,孙元章,等(Yuan Ye, Cheng Lin, Sun Yuanzhang,etal). 广域阻尼控制的时滞影响分析及时滞补偿设计(Effect of delayed input on wide-area damping control and design of compensation) [J]. 电力系统自动化(Automation of Electric Power Systems), 2006,30(14):6-9.
[14]盛戈皞,江秀臣,曾奕(Sheng Gehao, Jiang Xiuchen, Zeng Yi).考虑网络传输延迟的二级电压控制(Secondary voltage control considering network transmission delays) [J]. 电力系统自动化(Automation of Electric Power Systems), 2007,31(15):30-34,50.
[15]李生虎,周晶 (Li Shenghu, Zhou Jing). SVC位置和容量的灵敏度和概率分析(Sensitivity and probabilistic analysis for location and capacity of SVC) [J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2010,22(4):24-29.
[16]苏宏业,褚建,鲁仁全,等. 不确定时滞系统的鲁棒控制理论[M].北京:科学出版社,2007.
[17]李炜, 李亚洁(Li Wei, Li Yajie). 基于LMI 的网络化控制系统鲁棒容错控制器的设计(Design of robust fault-tolerant controller based on LMI for networked control systems )[J]. 兰州理工大学学报(Journal of Lanzhou University of Technology),2008,34(2):74-79.
[18]邱军, 梁才浩(Qiu Jun, Liang Caihao). 电厂的电压无功控制策略和实现方式(Strategies and implementation modes of voltage and reactive power control for power plant)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2004,16(2):69-72.
盛戈皞(1974-),男,副教授,博士,研究方向为电力系统自动监视和控制。Email:shenghe@sjtu.edu.cn
刘亚东(1982-),男,博士研究生,研究方向为电力系统网络化监测与控制。Email:lyd@sjtu.edu.cn
江秀臣(1966-),男,教授,博士,研究方向为电力系统设备监测和电气设备自动化。Email:xcjiang@sjtu.edu.cn
RobustFault-tolerantControlMethodforNetworkedSecondaryVoltageControl
SHENG Ge-hao, LIU Ya-dong, JIANG Xiu-chen
(School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University,Shanghai 200240,China)
According to the principle secondary voltage control and characteristics of network transmission, the networked secondary voltage control (NSVC) model is proposed considering uncertain time-delay, data dropout and data packet disorder. By means of the linear matrix inequality (LMI), the design methods of robust fault-tolerant NSVC controller is given which can ensure the stability and control performance under network environment. The operation performance of the proposed NSVC scheme is analyzed and the simulation results on the classic 3-generator system are presented to illustrate the validity and effectiveness of the proposed control scheme.
secondary voltage control; robust control; fault-tolerant control; networked control system; uncertain time delay
TM761
A
1003-8930(2012)01-0043-06
2011-01-13;
2011-02-22
国家自然科学基金资助项目(50707018)
