基于改进PSO的原动机仿真系统PI参数优化
2012-11-09曾崇群刘觉民鲁文军宋海燕
曾崇群, 刘觉民, 鲁文军, 宋海燕
(湖南大学电气与信息工程学院, 长沙 410082)
基于改进PSO的原动机仿真系统PI参数优化
曾崇群, 刘觉民, 鲁文军, 宋海燕
(湖南大学电气与信息工程学院, 长沙 410082)
原动机仿真系统中的速度电流综合调节器实质为PI调节器,其比例系数kP和时间常数τL依靠传统方法难以确定。针对此问题,提出一种改进的粒子群优化算法,以ITAE指标作为改进PSO优化算法的适应度函数。通过具体实例,运用MATLAB仿真试验,比较分析传统方法、免疫遗传算法和改进粒子群算法的控制效果。试验结果表明:改进的PSO优化算法简单实用,并可显著提高原动机仿真系统的动态特性。
粒子群优化; 原动机仿真; PI调节器; 参数优化
原动机仿真系统主要包括调速器仿真和原动机自平衡特性仿真,其基本特性即指的自平衡特性。自平衡特性是所有作旋转运动元件的普遍规律,只不过因为能量来源及通道、机械结构等的差别而存在不同的自平衡系数Kc。在额定负载时,原动机(水轮机、汽轮机)的特性曲线为45°,其自平衡系数Kc≈1,而直流电动机由于电枢电阻Ra很小,固有机械特性很接近水平线,自平衡系数Kc=30~40。由此可见,在不采取措施的情况下,直流电动机固有的机械特性难以模拟原动机的自平衡特性。为此,引入了电流速度综合调节器[1~3]。
按照传统方法,比例系数kP和时间常数τL最优组合的选择须依靠工程经验和反复试验获得;若模拟不同容量机组、改变原动机的额定输出功率, 须重新调定PI参数才能保持原有动态特性不变,这不仅耗费大量时间,还需进行繁琐的现场试验[3]。近来,有学者将免疫遗传算法应用于PI参数的优化,直接用于现场运行调试,并取得了较好的效果。它克服了传统算法耗时耗力、控制性能不理想等诸多不足,但存在群体规模、染色体尺度、交叉与变异概率等参数较难确定、易产生早熟收敛等问题,并且其性能对参数有较大的依赖[4~6]。
本文提出一种改进的PSO优化算法,以ITAE指标作为改进PSO优化算法的适应度函数。该改进的PSO优化算法既避免了寻优过程过早陷入局部最优,又保证了寻优过程具有较快的收敛速度,使得参数寻优的效率大大提高。当改变原动机的额定输出功率、运行工况时,只需输入新的相关参数,就可据此计算出相应的最佳PI参数组。此方法既适于模拟调节器PI参数的离线计算,又可用于微机控制型原动机仿真系统的PI参数在线计算。
1 改进的PSO优化算法
1.1 基本PSO算法
PSO是由Kennedy和Eberhart提出的一种启发式全局优化算法,它是一种基于群智能的演化计算方法[7]。它主要包括3个基本因素:①刺激的评价;②与近邻的比较;③对领先近邻的模仿。
在PSO算法中,每一个潜在的问题都相当于n维空间中的一个没有重量和体积的微粒,称为“粒子”,并在n维空间中以一定的速度飞行,在自身和种群最优个体的影响下,不断改变自己的速度和位置,飞向目标及种群中心。Xi=(xi1,xi2,xi3,…,xiD)表示第i个粒子在d维空间的当前位置,将其代入目标函数就可以得到其适应值,根据适应值的大小衡量其优劣。它经历过的最好位置,即个体(局部)最好位置记为Pbest,可表示为Pi=(pi1,pi2,pi3,…,piD);微粒的速度用Vi=(vi1,vi2,vi3,…,viD)表示;另外全局最好位置记为Gbest,可表示为Pg=(pg1,pg2,pg3,…,pgD);w为惯性权重,c1和c2为两个加速系数,均为正的常数,通常在0~2之间;r1和r2为两个随机数,在[0,1]内变化,则PSO算法d维的进化方程为
(1)
(2)

1.2PSO算法的改进
在标准粒子群算法中,惯性权重w是用来控制过往速度对当前速度的影响程度,平衡PSO算法全局搜索能力和局部搜索能力的[8,9]。若w较大,则粒子有能力扩展搜索空间,全局搜索能力强;若w较小,则粒子主要是在当前解的附近搜索,局部搜索能力强;当w=0时,粒子没有记忆性,根据式(1)和式(2),它将飞向个体最优位置和全局最优位置的加权中心,而处于全局最优位置的粒子将保持静止。
从寻优的整个过程来看,前期主要是扩展搜索空间,需要较大的w;后期主要是在最优解附近精细搜索,需要较小的w;所以本文将w从最大惯性权重到最小惯性权重之间线性减小,即
(3)
式中:wn、wmax和wmin分别为第n次迭代用的惯性权重、最大惯性权重和最小惯性权重。
另外,为了兼顾全局版PSO算法、局部版PSO算法和具有惯性权重的PSO算法的优点提出一种改进。即在具有惯性权重的PSO中,考虑利用粒子局部平均值避免群体陷入局部最优,利用全局最优加速收敛。假设第i个粒子旁边有n个粒子,则用pa表示这n+1个粒子的平均值,则有
(4)
改进后PSO的速度更新公式为
(5)
从改进PSO算法的进化方程式(3)和式(5)可以看出,在进化计算的早期引入粒子的局部平均位置,这样避免改进PSO算法过早陷入局部极值:同时,惯性权系数随着迭代次数的增加而线性衰减,其对收敛速度的影响会逐渐减弱;而且,改进PSO算法中仍然保留粒子群的全局最优位置,加快了改进PSO算法的收敛速度。实际上,改进PSO算法中所引入的粒子局部平均位置,其实质相当于在具有动态惯性权重的PSO算法中增加了一个扰动项。正是该扰动项的引入,增加了粒子群群体的多样性,有助于粒子摆脱局部极值点[10,11]。
1.3 参数的编码和目标函数
利用改进PSO进行PI参数的优化整定,首先将PI参数编码成粒子编码串,其形式为
[kpτL]
粒子中每个变量均用实数表示,变量取值范围视具体工程应用背景估计确定,通过粒子群优化算法在该范围内寻求上述变量的最优组合。
一组好的PI参数能使系统拥有较好的控制品质,同时其优化算法定义的适应值也最小。对于阶跃响应,其主要性能指标一般包括超调量、上升时间和稳定时间。根据实际控制性能的要求,本文以ITAE(时间乘以绝对偏差乘积积分)指标作为改进PSO优化算法的适应度函数,即
(6)
式中:t为时间;∞为积分上限(系统稳定时间);e(t)为误差。
ITAE准则对初始误差考虑较少而主要限制过渡过程后期出现的误差。采用ITAE准则的系统一般具有快速、平稳、超调量小的特点。
2 仿真试验
发电机原动系统仿真框图如图1所示,为了更好、更直观的进行试验仿真,在不改变原动机仿真系统动态特性的情况下把图1等效为图2。
PI电流调节器控制对象的传递函数为
(7)
试验在matlabsimulink下进行,从图2中Ui处输入一阶阶跃信号,观察分析Uo处的响应波形。模拟参数采用实际的原动机动态仿真装置。直流电动机额定值:PN=38.5 kW,UN=220 V,nN=1000 r/min,最大电枢电流150%IN,额定电流时,其反馈电压为1 V。晶闸管整流桥电压放大系数ksc=82.5,整流桥等效时间常数τ=2 ms,回路总电感L=2 mH,电枢回路总电阻Ra=0.055 Ω。电流反馈滤波时间常数Ti=1 ms;对应的调节器控制对象的传递函数为
(8)

图1 原动机仿真系统框图

图2 原动机仿真系统等效框图
改进PSO优化算法程序采用m文件编写。控制参数为:kp和τL的搜索区间为[0,2],初始种群个体(粒子)数N=20,最大迭代次数G=30,c1=c2=2,c3=0.9,每个粒子的邻居数M=2,惯性权系数wmax=0.9,wmin=0.1。免疫遗传算法的控制参数为:群体规模Q=50,交叉概率Pc=0.5,变异概率Pm=0.01。采用ITAE准则作为性能函数指标,所得的参数值如表1所示,其单位阶跃响应如图3,响应评价指标比较结果如表2所示。
从表2、图3中可知,GA和改进的PSO算法较传统方法有较大的优势。在考虑超调量、稳定时间以及算法的简便、可行性等因素后,本文提出的改进PSO优化算法控制效果要优于GA。此外,动模试验室原动系统动态仿真也证明了该PSO算法的有效性、实用性。

表1 PI参数比较
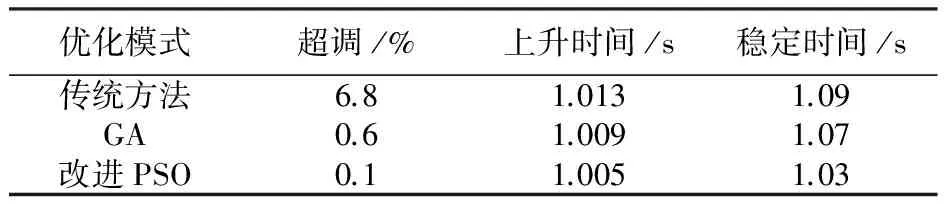
表2 仿真指标比较
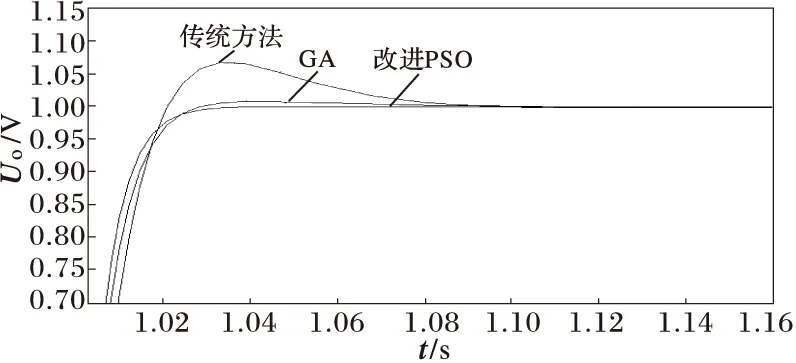
图3 单位阶跃响应
3 结论
本文提出了一种改进的PSO优化算法,该方法综合考虑了全局最优值与局部平均值的影响,在寻优过程中既具有较快的收敛速度,又避免过早陷入局部极值,有效地提高了PSO算法的计算效率。
1)仿真结果显示,该算法简单易行,可以方便、准确寻找PI参数的最优解,并可显著地提高原动机仿真系统的动态特性。
2)该算法既适于模拟调节器PI参数的离线计算,又可用于微机控制型原动机仿真系统的PI参数在线计算。
[1] 郑玉森(Zheng Yusen).模拟发电机组原动系统仿真(The simulation of the prime moves systems of dynamic turbine-generator simulators)[J].天津大学学报(Journal of Tianjin University),1985,8(3):83-90.
[2] 覃平生,刘觉民,周友庆,等(Qin Pingsheng,Liu Juemin,Zhou Youqing,etal).基于80C196KC的原动机仿真系统设计(Design of prime mover simulation system based on 80C196KC)[J].电力自动化设备(Electric Power Automation Equipment),2003,23(2):41-45.
[3] 陈明照,刘觉民,谭立新,等(Chen Mingzhao,Liu Juemin,Tan Lixin,etal).基于遗传算法的原动机仿真系统PI参数快速寻优(Fast seeking the superior PI parameters in prime mover simulation system based on genetic algorithm)[J].继电器(Relay),2007,35(2):25-28,39.
[4] 任子武,伞冶,陈俊风(Ren Ziwu,San Ye,Chen Junfeng).改进PSO算法及在PID参数整定中应用研究(Improved particle swarm optimization and its application research in tuning of PID parameters)[J].系统仿真学报(Journal of System Simulation),2006,18(10):2870-2873.
[5] 徐小平,钱富才,刘丁(Xu Xiaoping,Qian Fucai,Liu Ding).基于PSO算法的系统辨识方法(Method of system identification based on PSO algorithm)[J].系统仿真学报(Journal of System Simulation),2008,20(13):3525-3528.
[6] 倪庆剑,刑汉承,张志政,等(Ni Qingjian,Xing Hancheng,Zhang Zhizheng,etal).粒子群优化算法研究进展(Survey of particle swarm optimization)[J].模式识别与人工智能(PR﹠AI),2007,20(3):349-357.
[7] Gaing Zwe-Lee. A particle swarm optimization approach for optimum design of PID controller in AVR system[J].IEEE Trans on Energy Conversion,2004,19(2):384-391.
[8] 赵国波,刘天琪(Zhao Guobo,Liu Tianqi).基于混合粒子群优化算法的电力系统无功优化(Reactive power optimization based on hybrid particle swarm optimization algorithm)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2007,19(6):7-11,47.
[9] 吕林,周学亿(Lü Lin,Zhou Xueyi).改进PSO算法和Lagrange乘数法应用于短期发电计划(Improved PSO algorithm and Lagrange multipliers method application in the short-term scheduling)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2010,22(1):106-110,125.
[10]方红庆,孙祖怡(Fang Hongqing,Sun Zuyi).基于改进粒子群算法的水轮发电机组PID调速器参数优化(Optimal hydraulic turbo generators PID governor tuning with an improved particles swarm optimization algorithm)[J].中国电机工程学报(Proceedings of the CSEE),2005,25(22):120-124.
[11]Ratnaweera Asanga,Halgamuge S K,Watson H C.Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[J].IEEE Transactions on Evolutionary Computation,2004,8(3):240-255.
曾崇群(1985-),男,硕士研究生,研究方向为电力系统仿真与控制。Email:zengchongqun1985@126.com
刘觉民(1950-),男,教授,研究方向为电力系统运行与控制。Email:ljm1397316@sina.com
鲁文军(1971-),男,博士,讲师,研究方向为电力系统运行与控制。Email:LWJZXY@yahoo.com.cn
OptimizingPIParametersinPrimeMoverSimulationSystemBasedonImprovedParticleSwarmOptimizationAlgorithm
ZENG Chong-qun, LIU Jue-min, LU Wen-jun, SONG Hai-yan
(College of Electrical and Information Engineering, Hunan University,Changsha 410082, China)
In the prime mover simulation system, parameters of the PI regulator, such as ratio coefficient kP and time constantτL, are difficult to be determined by the traditional methods. To solve this problem, this paper proposed an improved PSO algorithm with the ITAE criterion of speed errors as the fitness function of the improved PSO algorithm. By using the specific example and the MATLAB simulation, the traditional method, the immune genetic algorithm and the improved particle swarm control were compared. The results showed that the improved PSO algorithm can easily and accurately find the optimal PI parameters, and significantly enhance the enable the dynamic characteristic of prime mover simulation system.
particle swarm optimization; prime mover simulation; PI regulator; parameter optimization
TM743
A
1003-8930(2012)01-0100-04
2010-12-20;
2011-03-26
湖南省科技计划项目(2010CK3016);湖南大学“中央高校基本科研业务费”能力培养类项目(2009y)
