机械控制工程中案例化教学的改革及实践
2012-11-07袁明新
袁明新,王 琪,洪 磊,张 鹏,申 燚
(江苏科技大学机电与汽车工程学院,江苏张家港215600)
机械控制工程中案例化教学的改革及实践
袁明新,王 琪,洪 磊,张 鹏,申 燚
(江苏科技大学机电与汽车工程学院,江苏张家港215600)
针对机械控制工程教学中的不足,在课程改革思路基础上,重点探讨了基于工程案例驱动的教学模式。通过启发型案例激发学生的学习兴趣;通过认知型案例诠释教学重点和难点;通过设计型案例提高实践环节质量。教学实践表明,案例驱动教学发挥了学生主动性,培养了学生创新能力,改善了教学效果。
控制工程;案例化教学;教学模式;改革及实践
机械控制工程是机械类专业的重要技术基础课,重点研究控制论在机械工程中的应用,具有理论性强、知识点多、内容抽象等特点,学生经常感到枯燥、乏味。如何通过课程教学改革来激发学生学习兴趣,进而改善教学效果,是近年来一线教师所不断探索的内容。目前机械控制工程教改内容主要有[1-3]:(1)通过制定新教学大纲来整合教学内容,优化教学体系;(2)采用现代教育技术来提高教学效率;(3)采用启发式教学来激发学生学习兴趣;(4)建立科学合理的考核体系等。一系列改革在提高学生学习兴趣、发挥学生学习主动性等方面起到了促进作用,但学生的系统设计能力提高并不明显。针对控制工程课程特点及教学现状,课题组深入开展了该课程的教学改革,重点研究了基于工程案例驱动的教学方法。教学实践表明,课程改革有效地改善了教学效果,提高了学生知识掌握和应用能力。
一 机械控制工程课程改革思路
机械控制工程课程具有较强的工程应用背景,而学生自身往往缺乏工程实战经验,如何上好这门核心
专业基础课,课题组深入开展了课程改革,并从以下四个方面进行了探索和实践。
(一)教学内容改革
在掌握控制论基本原理的基础上,进一步整合和精简教学内容,优化教学体系。课题组精选了“十一五”国家级规划教材《控制工程基础》[4]作为教学教材,将控制系统基本概念、数学模型、时域分析、频域分析和PID控制及其应用作为课程的主要教学内容。值得一提的是,在PID控制部分,在新教学大纲里,课题组完全从应用角度出发,将以往偏理论的控制系统设计和校正内容,改为讲授PID控制器含义、模拟PID、位置式和增量式数字PID、PID各环节作用以及PID整定。从课堂反映来看,学生能比较清晰地掌握PID控制器知识点;从后期实践来看,学生也能熟练运用PID去设计系统,达到了教学改革的目的。
(二)教学方式改革
课题组根据实际情况,采用了分层次教学。即对于不打算考研,以学以致用为主的学生,在阐述清楚控制理论基本知识基础上,将重点放在了知识点的应用。而对于想继续深造的同学,则以讲座形式进行内容补充,比如开设了根轨迹、非线性系统分析等,这样既不影响前者,又满足了后者的考研需求。
(三)教学手段改革
课题组基于现代教育技术来提高教学效果。首先将多媒体图文并茂、音像丰富、信息量大的优点,与板书条理清楚、重点突出优点有机结合;其次利用中国数字大学城平台,建设了《自动控制基础》精品课程网站,完善了答疑、讨论和交流模块,方便了学生课后复习以及与主讲教师的交流等。针对控制工程课程中数学含量多,公式推导麻烦的问题,课题组还利用Matlab软件,针对数学模型、时域分析、频域分析和PID控制等内容开发了相应的计算机辅助教学系统,将抽象理论更加具体化和直观化。
(四)教学方法改革
教学方法直接关系到课程最终的教学效果,教学手段再先进,方法不得当也不能激发学生学习兴趣,提高学生学习主动性。为此课题组从知识结构以及应用角度出发,将教学与工程背景相结合,根据不同的教学内容设计不同的工程案例,提出了基于工程案例驱动的教学模式。
二 工程案例驱动的教学模式
课题组所提出的案例驱动教学,其本质上是将理论教学与工程实践相结合,通过工程案例来激发学生的学习兴趣,发挥学生主体性,让其主动去学,同时又借助工程案例来加强学生的创新和实践能力的培养。为此,根据教学要求,课题组设计了若干工程案例,并将其划分为三种类型:启发型、认知型和设计型。
(一)启发型案例教学模式
启发型案例主要是针对课程或章节,采用一些综合性工程案例让学生了解课程或章节的重要性,进而激发学生对后续知识点的学习兴趣。在课程开篇之际,为了激发学生学习兴趣,并了解控制本质。课题组提供了一段学院学生获奖的“飞思卡尔”智能车比赛视频,先将学生思绪引入到赛车的速度激情中去,然后引出思考:如何在高速下让赛车(如图1)沿着黑线走但不冲出赛道?进而过渡到系统的控制本质:检测光电传感器中心点与黑线的距离偏差,并纠正偏差。通过比赛视频,学生们在掌握系统控制本质同时,也纷纷表示要加入到学院智能机器人实验室,从而给控制工程教学开了一个好头。

图1 光电组比赛用赛车
除课程开篇之际,我们在其它章节也同样引入了工程案例,比如在讲述时域分析时,引入了高等级公路动态称重系统,在讲述频域分析时引入了上世纪沙俄部队齐步振跨桥梁的案例。
(二)认知型案例教学模式
认知型案例主要是针对教学中的重点和难点,利用一些小型或局部性工程案例来诠释知识点。控制工程知识点多而抽象,难以理解,为此课题组针对知识点设计了认知型案例。比如:在系统组成知识点上,设计了温箱自动控制系统案例来诠释系统组成及其作用。在比例环节知识点上设计了齿轮传动副等等。认知型案例让抽象的知识点直观化,从而帮助学生消化和掌握知识点。
(三)设计型案例教学模式
设计型案例主要是通过提供可供操作的工程项目,让学生将所学的理论知识实现工程应用,进而培养学生的实践动手能力和创新能力,实现实践向创新型和研究型转变。为此,课题组从以下三个方面进行了探索和实践。
(1)实验项目。由于实验学时少,目前机械控制工程所开设实验,主要按图索骥地搭建电路图来模拟典型环节,或测试二阶系统的时域响应和频率响应等。所有参数都参考实验指导书,大大弱化了学生的主动性。为了改变这种状况,课题组在实验前先提供一些机械平移系统和电气系统等,让学生先运用课堂知识建立微分方程,获得系统数学模型,然后再借助实验设备来模拟或测试系统时域响应和频率响应,这样在强化实验同时也融合了课堂知识。此外,针对志在考研的同学,课题组也根据补充讲座内容设置了1~2学分课外开放实验项目,满足他们以及其他感兴趣的同学。
(2)大学生本科创新。为了培养大学生的创新精神和实践能力,鼓励和支持大学生尽早地参与科学研究和技术开发等创新活动,同时更好地体现课程改革中“工程驱动”的思想,针对学校的大学生本科创新项目,课题组联合学有余力的同学积极申报了若干以控制为主的项目,比如校级重点本科创新项目:服务机器人导航运动控制系统设计,就是集合了控制工程中的数学建模、时域分析、PID控制等知识,通过该项目很好地将课程所学的知识点进行了前后贯通,从而培养了学生实践能力和创新能力。
(3)大学生竞赛。为了进一步加强大学生实践、创新能力和团队精神的培养,课题组每年还选拔一部分优秀学生,开发一些设计性项目去参加各类比赛。比如2010年设计了“四轴飞行器”参加了江苏省机械创新比赛,2010、2011年连续两年参加了全国“飞思卡尔”智能车比赛,这些项目无一例外都涉及到系统控制。学生在获得荣誉的同时,都一致认为参加比赛不仅培养了创新能力和团队协作精神,也提高了分析问题和解决问题的能力。
案例驱动式教学一方面可以较大程度地激发学生的学习兴趣,发挥他们主体性来主动学习、主动实践;另一方面也对教师的业务水平提出了更高的要求,不仅要求有比较深的理论知识,而且要求有工程实践经验,只有这样才能更好地完善教学。
三 案例化教学设计及实践
为了进一步阐述如何进行案例化教学,本节以教学内容第五部分,即PID控制及其应用为例进行教学设计及实践。近年来,虽然智能控制等都得到了很大发展,但基于PID的工业现场控制仍占据主要地位。PID教学若直接从理论着手,学生很难理解和接受。为此课题组首先设计了一个启发型案例——恒温箱控制,让学生从主观上认识到是否增加PID控制策略、以及PID控制器参数的优劣对系统的影响。
图2为某恒温箱系统的阶跃响应曲线[5],其类似于带延迟的一阶惯性环节的响应曲线。
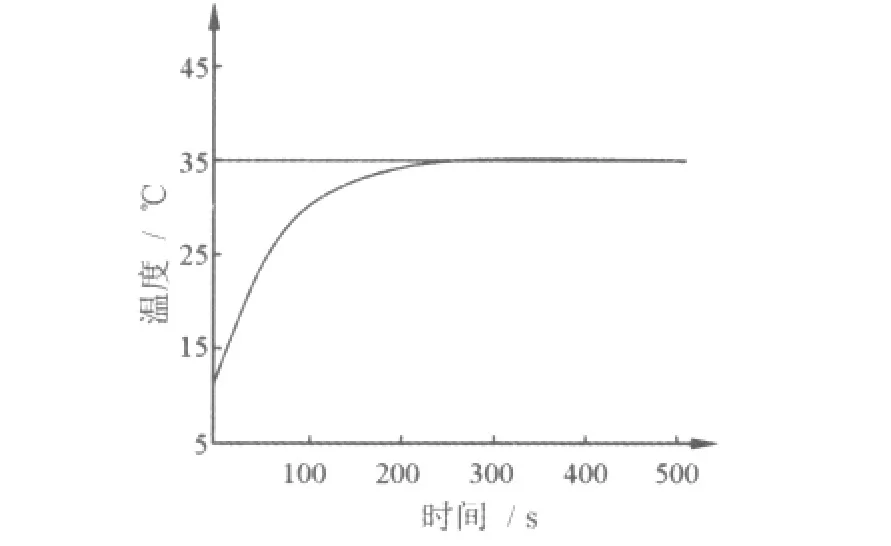
图2 温箱阶跃响应
根据切线法等即可获得该系统的数学模型:

为了体现出PID在恒温箱控制中的作用,以及控制器参数(kp、ki、kd)的影响。课题组首先将系统在无控制策略情况下的输出(图3)展现给学生,由图可以看出系统是发散的,不能实现恒温控制。然后对系统增加PID控制策略,从而获得图4的系统输出。对比图3和图4,让学生明白增加PID控制策略后,系统能基本上收敛于设定值35℃,由此看出给系统施加PID控制的重要性。接着进一步引导学生仔细观察图4,可以发现温度虽收敛但在设定值处出现振荡,这对于系统的稳定性来说不是很好。为什么会造成这种情况呢?可以提出这个问题让学生思考,并最终给出解释——那是因为PID控制器参数选择不当造成的。图4的控制器参数是通过常规的试凑法获得的,其值为:kp=20、ki=0.01、kd=90。最后给出经过遗传优化的结果(图5)。由图可以看出,系统响应速度更快、更平稳。此时的PID 参数值分别为:kp=10.23、ki=0.03、kd=7.95。通过该启发型案例,可以向学生传递两个信息:一是PID控制策略对系统的控制很重要;二是参数的整定对系统控制的精度和稳定性很重要。

图3 无任何控制策略的系统输出

图4 基本PID的系统输出

图5 遗传优化PID的系统输出
四 结 语
针对机械控制工程课程特点,课题组开展了一系列旨在提高教学质量的教学改革,并将基于工程中项目驱动的教学方法作为研究重点。案例化教学实施至今已接近两年,期间课题组组织学生成功申报近10项与控制相关的各类本科创新项目,其中2项为江苏省大学生实践创新训练计划,与学生合作发表论文6篇,申请发明专利1项,“四轴飞行器”在2010年江苏省机械创新大赛中荣获二等奖,“飞思卡尔”智能车在2010年荣获华东赛区光电组一等奖、全国二等奖,在2011年荣获华东赛区光电组和摄像头组两个二等奖,电磁组三等奖。教学实践表明课题组的教学改革是有效的,而基于项目案例驱动的教学模式,对激发学生的学习兴趣,培养学生的创新能力、团队协作精神,提高分析问题、解决问题的能力起到了极其重要的作用。
[1]杨汇军,张 健.“自动控制理论”课程实验教学改革的研究与实践[J].实验室科学,2010,13(6):20-22.
[2]王培良.自动控制理论课程建设与改革的探索[J].电气电子教学学报,2005,27(5):21 -23.
[3]付主木,高爱云.自动控制理论课程教学改革探索[J].中国现代教育装备,2010(5):84 -86.
[4]王积伟,吴振顺.控制工程基础[M].北京:高等教育出版社,2010.
[5]徐亚飞,刘官敏,高国章等.温箱温度PID与预测控制[J].武汉理工大学学报(交通科学与工程版),2008,28(4):554-557.
G642.4
A
1674-5884(2012)05-0137-03
2012-03-15
江苏科技大学教改教研课题“机械原理与设计课程群的实践环节体系与内容的创新探索”;张家港校区机电控制类课程群建设——案例化教学模式探索及实践;张家港校区机械电子工程重点专业建设项目
袁明新(1978-),男,江苏如东人,讲师,博士,主要从事系统控制、移动机器人导航等方面的研究和教学。
(责任编校 朱正余)
