电子海图与海事雷达
2012-11-06邓康全
邓康全
(国家海洋局南海工程勘察中心 广州 510300)
电子海图与海事雷达
邓康全
(国家海洋局南海工程勘察中心 广州 510300)
电子海图和海事雷达是航海的重要助航设备。为提高船舶在航行中的避碰能力,文章提出了电子海图图像与雷达信号的叠加方法。雷达的模拟视频信号、方位信号和触发脉冲,通过数模转换,利用极坐标与直角坐标变换模型和图像匹配,可以在电子海图底图上实时显示雷达捕获到的目标,以提高对船舶周围环境的监控能力。
电子海图;海事雷达;雷达图像
在航海中,无线电通信称为“顺风耳”,而电子海图和雷达等助航设备即称为“千里眼”。电子海图系统可显示来自电子导航海图的选定信息和导航传感器的导航信息,以辅助驾驶员进行航线设计和航行监视。以电子海图为航行信息核心,实现与雷达、GPS、计程仪、测深仪和AIS等各种设备的信息融合,是电子海图信息系统的发展趋势。海事雷达可以测量水上目标及运动目标的距离和方位,并可以预测和判断运动目标下一步的运动态势,对本船与周围运动目标会遇态势下可能发生的碰撞危险进行判断和评估,辅助拟定本船的最佳避让策略,从而增强避碰决策能力。
电子海图与雷达的匹配定位导航,可在航行水域海图信息的基础上提供本船、本船周围的静态目标与动态目标三者之间的位置关系。实现了雷达视频数据的共享以及综合航行态势图的实时生成和显示,允许操作人员在同一个显示器上观察本船周围的全部态势,能集中精力判断并采取适当的行动,可以提高船舶避碰能力,这对船舶的航行,尤其是大雾天气中的近海航行和繁忙港道航行具有重要意义。目前国外部分产品已经实现了雷达和电子海图图像叠加的功能,而国内在这方面的研究比较少。笔者提出了一种雷达模拟视频和电子海图图像叠加方法,采集雷达的模拟视频信号、触发脉冲和方位信号,通过数模转换、坐标系转换和图像处理,实现雷达和电子海图图像的匹配,完成雷达和电子海图的叠加。
1 电子海图与雷达模拟信号图像叠加
雷达应获取的3种信号是:①雷达模拟视频信号是目标的回波信号和触发脉冲;②雷达模拟视频信号是以目标的回波信号为模拟信号;③方位信号是雷达天线扫描的方位信息,为模拟信号。触发脉冲是雷达的周期频率脉冲,用来实现图像处理与雷达发射冲周期的同步,通过数模转换模块,把采集到的模拟信号数字化,按照方位信息对雷达目标进行标绘,并与雷达的触发脉冲同步,形成极坐标形式的数字化视频信息,将其传递给图像处理模块。在图像处理模块中,极坐标形式的数字化视频信息转换为屏幕直角坐标形式的数字视频信息,对雷达视频图像在比例尺和显示方式上进行处理,实现雷达和电子海图图像匹配,根据雷达收发机的位置信息,以电子海图为底图,完成雷达和电子海图的叠加显示,基本流程见图1。
2 雷达模拟视频和电子海图图像叠加模型
2.1 雷达模拟视频数字化模型
采集的方位信号为模拟信号,通过幅度分层和时间量化转换为数字信号。雷达模拟视频信号通过时间量化和幅度分层转换为数字信号,然后存储这些信号,利用目标回波的幅度、个数和相关信息做累计判定,以确定目标的有无(图2)。
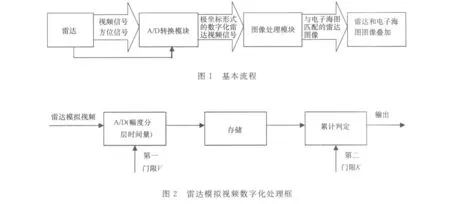
时间量化即距离量化,以雷达触发脉冲前沿为起点,将距离扫描的全程时间分成若干相等的时间单元Δt,即将雷达探测的距离全程分成若干相等的距离单元Δr,两者对应关系如式(1)所示。幅度分层即幅度量化,在距离量化间隔任一处,信号幅度大于相对门限V,就产生“1”。累计判定是一种雷达信号检测系统,通过设定门限K,对目标回波信息进行累计判定,确定目标有无。
式中:c为光速,c=3×108m/s。
2.2 极坐标转换为直角坐标
初步处理后的数字雷达视频图像是以极坐标方式进行显示的,通过极坐标系和屏幕直角坐标系转换方程,处理数字化的雷达视频图像,使雷达视频图像和电子海图的坐标系一致。极坐标系和屏幕直角坐标系的对应关系如图3所示。
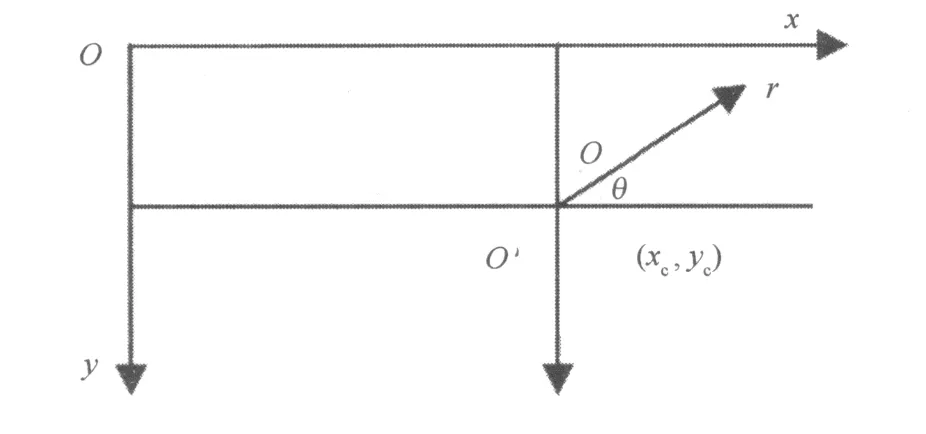
图3 极坐标系和屏幕直角坐标系转换
以O′点为原点的极坐标系和以O点为原点的屏幕直角坐标系的转换关系为:
式中:xc,yc为显示中心值,这样就以实现雷达图像和电子海图坐标系的统一。
2.3 雷达图像匹配模型
电子海图基本上具有任意缩放的特点,而雷达的量程是有限的,因此,基于电子海图缩放变化,对雷达图像进行合理的比例调整,实现雷达和电子海图图像的比例尺匹配。
雷达的探测半径为R,屏幕显示区域半径为a,计判定,以确定目标的有无。其中幅度分层设置第一检测门限,累计判定设置第二检测门限。
则雷达旬的比例尺1/sr可以简单的表示为

电子海图的原始比例尺为:1/s0,则雷达图像的缩放参数z为

雷达和电子海图的显示方式不同,雷达存在北向上、船艏向上和航向向上等显示方式,而电子海图的显示方式,对雷达图像进行旋转变换。用下面的仿射变换矩阵进行坐标转换,对图像进行缩放和旋转处理,实现雷达和电子海图的图像匹配。
一幅定义在直角坐标系woz的图像f经过几何变形如缩放、旋转等,产生了定义在直角坐标系xoy上的图像g(图4)。
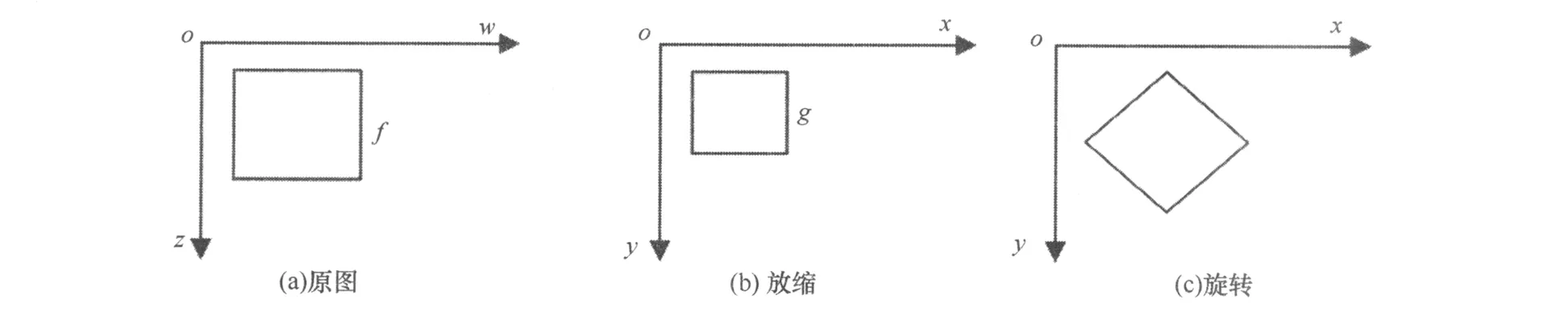
图4 图像的空间变换
缩放的仿射矩阵T1为
旋转仿射门矩阵T2为:
3 结果分析
用上述方法试验,将原始的雷达模拟视频进行数字化处理,得到数字化的雷达视频信息,通过对数字化的雷达视频进行坐标转换,得到雷达视频图像。可以看出:雷达和电子海图在显示方式和相应的比例尺上存在差异,基于电子海图的比例尺,通过参数的解算求得雷达图像的缩放比例。雷达图像和电子海图的显示方法不同,通过对雷达图像进行缩放和角度调整,根据雷达的位置(经纬度)信息,以电子海图为底图,实现雷达图像和电子海图的叠加,结果表明雷达和电子海图图像是匹配的,能够进一步提高驾驶员对船舶周围环境的监控能力,提高船舶航行过程中的避碰能力。
4 结束语
根据电子海图和雷达的显示特点,对采集的雷达模拟视频信号、方位信号和触发脉冲进行数字化、坐标转换和图像转换等处理,以电子海图为底图,实现雷达和电子海图的叠加。结果表明,雷达和电子海图信息是融合的,能提高驾驶员对船舶周围环境的监控能力,笔者提出的雷达模拟视频和电子海图图像叠加方法是可行的,对于船舶安全航行具有重要意义和广泛应用价值。