五杆多直线导向机构运动仿真方法研究
2012-10-26吴学农
吴学农,高 洪
五杆多直线导向机构运动仿真方法研究
吴学农1,*高 洪2
(1. 安徽机电职业技术学院机械工程系,安徽,芜湖 241000;2. 安徽工程大学机械与汽车工程学院,安徽,芜湖 241000)
基于平面机构运动学理论建立了五杆多直线导向机构运动学模型,提出了由各构件运动方程生成该机构动画的新方法,并在MATLAB平台上开发了该机构动画仿真程序。提出了使用杆长不变条件检验该机构动画仿真程序和运动方程正确性的方法,并通过算例进行了验证。为该机构的应用提供了技术基础。
五杆多直线导向机构;运动学模型;动画仿真
直线导向机构的直线运动轨迹是由连杆机构或以连杆机构为主的组合机构来实现的。通常所说的直线导向机构,大多是指单直线或双直线铰链四杆直线导向机构,这些机构在印刷机械、纺织机械、食品机械、仪器仪表以及载荷沉重的冶金机械、港口机械中都大量存在。而多直线导向机构,其同一条连杆曲线上则具有三个以上近似直线段,尽管工程中已有应用,如实现多工位机床中工件转位运动,实现自动加工线中某些工艺动作和自动装配线上搬运机器人等,但其设计理论的繁琐和设计结果不能直观可视则限制了这类机构的应用范围[1-3]。
本文利用计算机仿真技术研究了五杆多直线导向机构的可视化问题,与机构学通常研究方法不同的是,这里既以理论分析为基础,又避免了理论分析结果不直观的缺陷,并提出了依据各构件运动方程生成五杆机构动画的方法,该动画也可与“杆长不变”原理结合,以验证其运动方程的正确性。
1 运动学建模

图1 五杆多直线导向机构示意图
Fig.1 Sketch ofFive-Bar Mechanism Having Multi-Straight-Line Locus



将式(2)、(4)代入(5)整理得:


其中,令:
则:
将式(6)、(7)作万能代换解三角方程可得:


式(10)、(11)中取根号前的“+”或“-”号可结合该机构具体装配方案取舍。

2 仿真程序编制思路
一般地,MATLAB动画技术可实现点、曲线、曲面的任意空间运动[2,6]。其实现步骤是:首先以plot命令生成仿真对象(杆件)的运动初始位置图形并保存在一个图形句柄中,接着,再通过set命令访问该句柄并按照预期的运动规律更新句柄参数,最后在图形窗口中以drawnow命令显示出更新后的句柄图形。在五杆多直线机构动画仿真编程中使用了5个图形句柄:其中杆A0A1、A1A2、A2A3、A3A4各使用了1个线段图形句柄,连杆点P与点A2形成的固接杆PA2使用了1个线段图形句柄。各线段图形句柄的端点初始位置和更新位置生成可基于式(13)~(16)实现。
仿真程序正确性检验:在动画运行中,基于式(13)、(14)及(16)可生成各杆的动态长度,若各杆长度不变,则表明动画仿真程序正确;反之则表明运动学模型或动画仿真程序有误[2]。
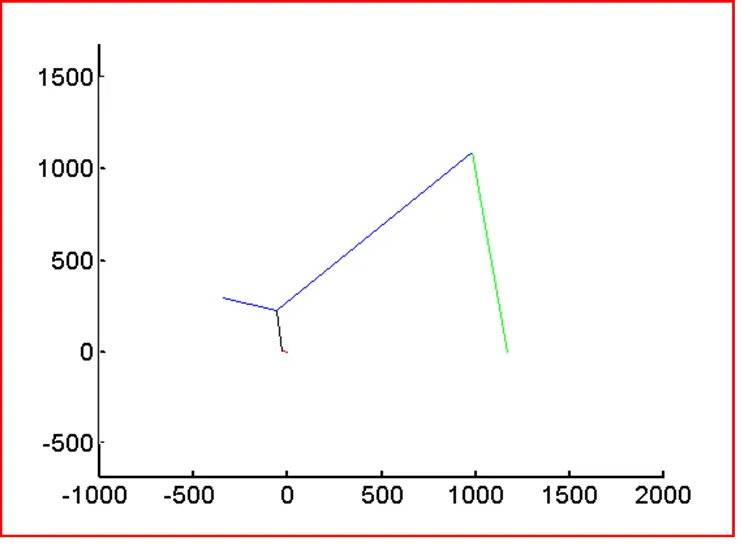
图2 五杆多直线机构动画仿真(1)
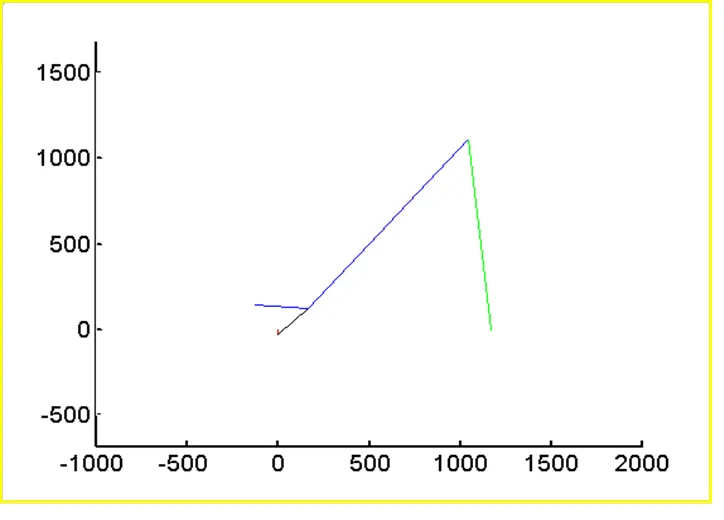
图3 五杆多直线机构动画仿真(2)

图4 五杆多直线机构动画仿真(3)
3 算例验证
4 结论
基于五杆三直线导向机构各构件运动方程生成其仿真动画的方法,既可以使该机构综合与分析研究中繁杂的理论结果可视化,又可以通过仿真程序动态运行中“杆长不变条件”的检验反过来验证该机构运动方程正确性,为扩大该机构在工程实际中的应用范围提供了技术基础。
[1] 孟宪源.现代机构手册(下册)[M].北京:机械工业出版社,1994.
[2] 高洪,吕新生.多足仿生行走机构单足动画仿真建模及实现[J].系统仿真学报,2007(12):2798-2800.
[3] 刘葆旗,黄荣.多杆直线导向机构的设计方法与轨迹图谱[M].北京:机械工业出版社,1994.
[4] 申永胜.机械原理教程[M].北京:清华大学出版社,1999.
[5] 吴克坚,于晓红,钱瑞明.机械设计[M].北京:高等教育出版社,2003.
[6] 施小红,周佳.精通GUI图形界面编程[M].北京:北京大学出版社,2003.
RESEARCH ON KINEMATIC SIMULATION METHOD FOR FIVE-BAR MECHANISM WITH MULTI-STRAIGHT-LINE LOCUS
WU Xue-nong,*GAO Hong
(1. Anhui Technical College of Mechanical and Electrical Engineering,Wuhu,Anhui 241000,China; 2.School of Mechanical and Automotive Engineering, Anhui Ploytechnic University, Wuhu,Auhui 241000, China)
Kinematic equation of five-bar mechanism with multi-straight-line locus was derived from the theory of mechanics, and animation simulation for the mechanism was programmed by MATLAB language. Furthermore, the method based on bar-length invariance was presented to verify the validity of animation simulation program. The validity of above-mentioned kinematic equation and simulation program were proved by an example. The investigation provides technical basis for application of the mechanism.
five-bar mechanism with multi-straight-line locus; kinematic model; animation simulation
TH112
A
10.3969/j.issn.1674-8085.2012.04.018
1674-8085(2012)04-0078-03
2012-01-22;
2012-04-12
安徽省自然科学基金项目(090414172)
吴学农(1971-),男,安徽歙县人,实验师,主要从事机械CAD/CAM研究 (E-mail: ahjdwxn@163.com);
*高 洪(1963-),男,安徽枞阳人,教授,博士,硕士生导师,主要从事现代设计理论与CAD等研究(E-mail: gaohong0706@sina.com).
