基于GPRS的塔机实时监测系统的设计与实现*
2012-10-22余向阳宋宇宙韦权伟
余向阳,苏 娟,宋宇宙,韦权伟
(1.湖南大学电气与信息工程学院,湖南 长沙 410082;2.长沙海川自动化设备有限公司,湖南 长沙 410083)
0 引言
随着计算机、通信和控制技术的发展,塔机监测技术也在不断提高。但如何提高塔机的安全系数,实现覆盖全国的塔机监测技术,使运营商更好地掌握用户的塔机运行状态,并实施远程管理和监测,这方面的研究还很少。本文提出了基于通用分组无线业务(GPRS)的塔机实时远程监测系统的设计方案[1],并给出了实现方法,以C8051F120单片机为核心,能够实现传感器数据采集,本地实时显示并存储,基于Internet远程监测等功能,为大范围的塔机监测提供了一种新思路。
1 系统总体设计
基于GPRS的塔机实时监测系统主要包括塔机在线数据采集终端和无线远程终端、无线网络转发服务、设备管理与数据转发中心、监控中心(客户端、数据库)等4个子模块,如图1所示。在线数据采集终端将采集到的各种参数信息本地存储且可将数据采用SD卡导出,并通过GPRS通信单元以无线方式发送到GPRS网络,GPRS网络再将数据转发到Internet,最终传输到远程数据监控中心服务器[2,3],授权用户可通过监控终端登录数据监控中心实时查询监测且可导出历史数据记录。采用无线网络将相关数据汇入大型数据库进行统一管理,使得获取数据的渠道多样化,安全性也得到提高。
2 硬件设计与实现
硬件部分包括信号采集模块、数据存储模块、无线远程通信模块等,硬件原理框图如图2所示。
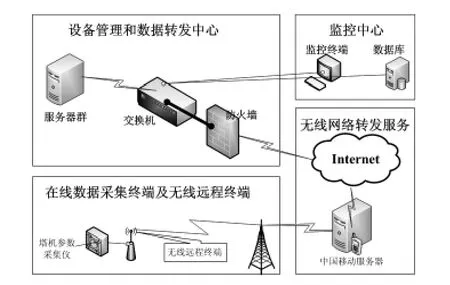
图1 系统结构图Fig 1 Structure chart of system
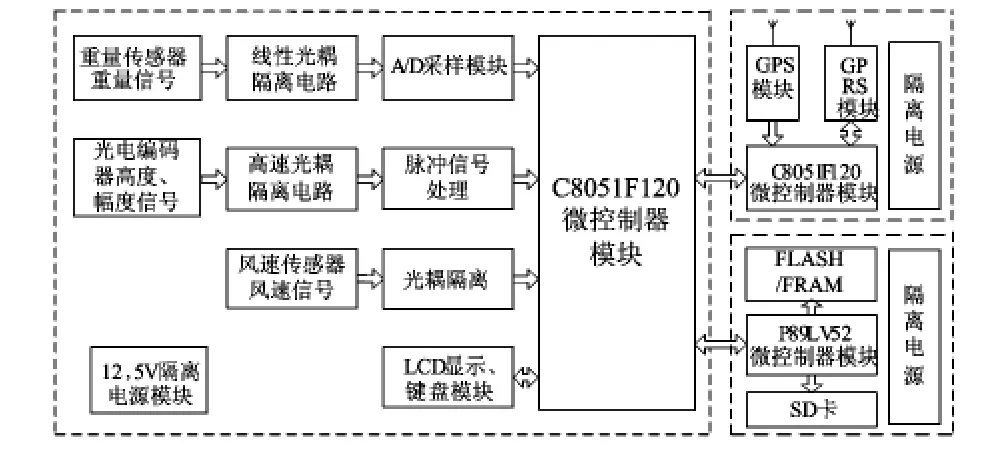
图2 系统总体框图Fig 2 Block diagram of system
2.1 模 块
塔机实时监测终端主要由专用传感器和监测仪表组成,能够在线监测塔机实时运行工况参数。采集终端和配套的重量传感器、编码器、行程限位器、风速仪等采集塔机运行的重量、高度、幅度、风速并计算出负载力矩。A/D采样模块与前级的重量传感器及其变送电路、线性光耦隔离电路共同完成信号采集模块重量的检测,因此,这部分采集模块包括:重量传感器及其变送电路、线性光耦隔离电路、A/D采样模块。
2.1.1 重量传感器及其变送电路
由重量传感器输出的模拟信号必须经过放大、滤波、限幅等调理电路后才能输入到A/D口进行模数转换。重量传感器的灵敏度为1 mV/V,采用5 V直流电源供电,满负荷输出为5 mV,信号较低,若供电电源精度和稳定性不高,则会直接影响到传感器的测量精度和误差,为此传感器供电电源采用高精度的三端稳压集成电路LP2954,稳压输出精度达到0.12%,满足系统测量精度的要求。放大器采用低温漂高精度仪用运算放大器AD620,AD620具有高增益、低失调电压和电流、低电压漂移、高输入阻抗、高共模抑制比、低温度漂移等特点,是一种通用性极强的仪用运算放大器。
2.1.2 线性光耦隔离电路
本系统应用于现场环境比较恶劣的建筑施工领域,各种强干扰不可避免,为了提高系统的抗干扰性能,设计了线性光耦隔离电路,其原理如图3所示。

图3 线性光耦隔离电路Fig 3 Linear and optical coupling isolating circuit
输入信号ZL_S经过C16滤波,从R12进入,电流流向是从R12到U8的3脚,然后经过U8的4脚到地,U6及其外围电路输出信号使U8的1,2脚之间的发光管导通,由于该发光的导通使U8的3,4脚之间的电流和5,6脚之间的电流大小一致,因此,U7的1脚输出信号与输入信号大小一致,W2起微调作用,减少因为元器件参数不一致导致的误差,输出信号经过后级的有源低通滤波电路进行处理,减少信号中的高频干扰。
2.1.3 A/D 转换模块
重量参数经过变送电路、线性光耦隔离电路后输出的连续变化的模拟量须经过A/D转换器把模拟量转换成数字量后才能输入单片机进行相关的处理。综合考虑各种情况与工程应用的实际需要,本系统选用的A/D转换器为AD7706芯片。AD7705/7706是应用于低频测量的2/3通道的模拟前端,该器件可以接收直接来自传感器的低电平的输入信号,然后产生串行的数字输出。利用∑-Δ转换技术实现了16位无丢失代码性能。选定的输入信号被送到一个基于模拟调制器的增益可编程专用前端,片内数字滤波器处理调制器的输出信号,通过片内控制寄存器可调节滤波器的截止点和输出更新速率,从而对数字滤波器的第一个陷波进行编程。
2.2 数据存储模块
为了保障发生事故后所记录的数据不被物理损坏,主机中将存储模块做成黑匣子结构,能保障数据存储单元的安全。黑匣子内部有自己的微控制单元P89LV52,同时含FLASH芯片、非易失性RAM芯片及作为外部存储的SD卡。该部分电路的供电部分采用一种新型的隔离电源模块,使该部分电源与信号采集模块的电源相互隔离,提高可靠性。该模块与信号采集MCU之间的数据交换也是采用高速光电耦合器通过串口进行通信,使该部分电路与信号采集模块的电源系统与数据交换系统实现完全隔离,真正实现黑匣子的功能要求。存储芯片内存储的数据可以通过SD卡导出,在PC机上还原,数据可作为事故的重要证据。
2.3 无线远程通信模块
利用GPRS模块进行数据传输时,数据格式必须符合互联网络的TCP/IP协议标准。由于TCP的协议头与数据传输控制比较复杂,数据传输效率低,塔机实时监测系统传输的是实时小数据量的应用,因此,使用基于UDP的数据传输协议[4,5]。
无线远程终端主要包括3个子模块:微处理器、GPRS无线传输模块、全球定位系统GPS,其功能主要是接收下位仪表的各种数据,然后以无线方式传输到可供数据中心使用的网络上去,如图1所示。微处理器采用C8051F120单片机,以串口通信的方式与在线数据采集终端进行双向通信。首先微处理器发送查询命令,在线数据采集终端接收到命令后将相应的数据发送给微处理器。微处理器将这些数据暂存,并准备将其通过GPRS网络发送到数据中心的网络。GPRS模块的功能是将接收到的数字信号转换成GPRS信号,利用移动通信网络发送到移动通信数据中心。当GPRS模块正常工作后,其就在无线远程终端与移动通信中心之间建立了一个完全透明的传输通路。无线远程终端在与数据中心通信之前需要首先进行握手连接,保证其为安全登陆。在登陆过程完成后,无线远程终端方可向数据中心发送数据。为了使数据中心能够了解每台设备所在的地理位置,无线远程终端都外接了 GPS,GPS以RS—232的通信方式将定位信息传输到无线远程终端中。通过对GPS数据的解析,获得系统的地理信息。
3 软件的结构和功能设计
塔机实时监测系统的应用软件程序容量比较大,且实时性较强,采用模块化的设计方法。这样整个系统层次分明,逻辑清楚,便于程序的调试和修改,又提高了系统的可靠性、灵活性和可维护性。塔机实时监测系统软件系统主要包括主控制模块、数据输入模块、远程与主机通信模块等。
3.1 主控制模块软件设计
主控制模块是全套软件的指挥中心,他将其他模块有机地连接在一起。其主要功能是完成系统的初始化、上电自检与显示、键盘扫描并根据不同按键执行不同的功能以及A/D采集、力矩计算、判断参数是否超限等,工作流程如图4所示。
3.2 远程通信部分软件设计
无线远程终端与信号采集终端的通讯在开始阶段是采用的中断方式,当无线远程终端通过串口向主机发送请求信号后,将触发数据采集系统的接收中断,主机识别出这一标志后,立刻进入非中断方式,与无线远程终端进行一问一答的单向通信方式。无线远程终端接着发送需要索取的内容,数据采集系统根据请求的内容发送数据,发送完毕后数据采集系统再次进入中断方式,准备新一轮通信,流程图如图5所示。
3.3 数据输入模块

图4 主程序工作流程图Fig 4 Flow chart of the main program

图5 无线远程终端与主机通信流程Fig 5 Flow chart of wireless remote terminal and host computer communication
塔机实时监测系统独立监测的各数据信号是一路代表重量的模拟信号和其他几路脉冲信号。模拟量主要涉及到A/D转换,而其他脉冲信号的监测主要通过计数和定时来实现,因此,该模块包括重量数据输入模块、脉冲量输入模块。
重量测量由拉力传感器输出的电信号经由前向通道进行调理后得到一个0~1.25 V的模拟信号,再经A/D转换器转换成00—FF的数字信号输入单片机,其中A/D转换器采用扫描方式进行采样。根据监测系统实时性要求确定采样周期为T=0.1 s。同时由于塔机工作环境恶劣,干扰源较多,为了减少对采样值的干扰,在进行数据处理之前先对采样值进行数字滤波处理,在本系统中采用了去极值平均滤波法。幅度、高度、风速的测量可以通过由旋转编码器的双路脉冲量来实现。
4 系统运行结果


表1 数据上传情况Tab 1 Situation of upload data
测试结果如表2所示,测试结果表明:该系统能够按照设计要求实现参数的监测、数据的上传,以及数据中心的管理,系统性能稳定可靠[7]。

表2 测试结果Tab 2 Test results
5 结束语
设计的塔机实时监测系统能够实时显示存储塔机运行过程中的重量、高度、幅度、风速及负载力矩,过载时通过显示、声音等多种手段报警,并通过GPRS无线传输方式自动上传各个参数状态到数据中心,监控中心可以实时监测塔机的运行状态。该装置已通过了国家特种设备安全型式试验,并已投入到长沙海川自动化设备有限公司运行使用,效果良好。
[1] 吴明龙,刘百芬.基于GPRS的远程抄表监控设计与研究[J].世界科技研究与发展,2008,30(6):773-775.
[2] Rotharmel S.IP-based telecom power system monitoring solution in GPRS networks[C]∥Telecommunications Energy Conference,INTELEC 2007,2007:769 -774.
[3] Johnnd V.Performance of IP-based service over GPRS[J].IEEE Transactions on Computers,2003,52(6):727 -741.
[4] 陈 昕,刘中晅,韩兆福.基于GPRS的远程监控系统掉线重拨技术实现[J].网络安全技术与运用,2010(9):61-62.
[5] 罗 静,芦东昕,黄烨明.面向网络机器人的数据传输机制[J].计算机工程,2005,31(13):102 -103,120.
[6] MIishra A.Performance and architecture of SGSN and GGSN of general packet radio service(GPRS)[C]∥Global Telecommunications Conference,IEEE,2001:3494 -3498.
[7] GB 5144—2006,塔式起重机安全规程[S].北京:中国标准出版社,2007.
