天线伺服系统的冗余设计
2012-10-20董旭锋张志彪
董旭锋,张志彪
(中国电子科技集团公司第五十四研究所,河北石家庄 050081)
0 引言
在卫星通信系统中,地面站天线的波束要精确指向卫星才能保证通信质量,尤其是对于漂移角度较大的卫星更需要通过及时跟踪来调整天线的指向,保证接收信号处于最强状态。因此在卫星通信地面站中,天线伺服系统是不可或缺的重要组成部分,通过伺服系统的跟踪控制使天线始终对准卫星以保证通信链路的畅通。对桁架结构的天线来说,伺服系统由天线控制单元、天线驱动单元、轴角传感器和交流电机等多个电气部件组成[6],伺服系统的可靠性直接影响通信系统的整体性能。国内对通信可靠性要求较高的卫星地面站通常采用进口伺服设备来控制天线跟踪。虽然进口伺服设备工作稳定,但也面临随机性的电子设备故障带来的停机隐患。针对上述问题,设计了冗余的天线伺服系统,提高了可靠性。
1 可靠性分析
在可靠性工程中,平均无故障时间(MTBF)和平均修复时间(MTTR)是用来衡量系统可靠性的2个重要指标[1]。平均无故障时间是指系统在2次故障之间的平均工作时间,MTBF越长表明系统越可靠。平均修复时间是指从出现故障到恢复正常的这段时间,MTTR短表明系统恢复得快。系统的可用度A由下式定义:

由式(1)可知提高系统的可靠性可以通过增加MTBF或减少MTTR来实现,在工程设计中元器件降额使用、简化电路、使用标准化模块和电路以及增强软件的容错性等都是为了增加MTBR。当故障的产生难以预测和消除时,如何降低MTTR成为重点考虑的对象,冗余设计是提高系统可靠性的有效途径。冗余设计可以得到多种系统结构,并且每个系统的可靠性及性能、价格等方面各具特色,在实际工程应用中综合考虑系统成本、复杂度以及设计的难度,通常使用1∶1冗余。1∶1冗余系统的可用度Ar表示为:

根据式(2)的计算,假设单系统的可用度为0.9,冗余后的可用度为0.99,系统的可靠性大大增加。
冗余设计提高系统可靠性的同时需要增加监测/切换部件用于监测主、备系统的运行状态,当发生故障时切换到备用系统,一般监测/切换部件的可靠性等级要高于要备份的单系统。
2 冗余设计
冗余天线伺服系统的组成如图1所示,天线控制单元是控制核心,由工控机和各种数据采集板卡组成,它提供人机界面、采集角度传感器提供的天线位置信息和接收机模拟电压输出,根据控制算法产生目标角度。天线控制单元将转动指令发送给天线驱动单元,天线驱动单元由内部逻辑电路控制功率器件驱动交流电机转动,电机经过减速机带动天线转动。天线驱动单元采集限位开关信息,如果发生限位则停止驱动电机。交流电机是驱动部件,角度传感器和限位开关是测量部件,三者都和天线直接连接,而且随着技术的发展目前已经非常可靠,不能也不必热备份。天线控制单元和天线驱动单元内部电子元器件众多,发生故障的几率远远大于电机、限位开关和角度传感器,因此冗余天线伺服系统主要是解决双套天线控制单元、双套天线驱动单元协调工作的问题。

图1 冗余天线伺服系统组成
在冗余系统中,切换单元用来监测/切换2套天线控制单元和2套天线驱动单元的工作状态。切换单元由可靠性较高的单片机配合成熟的外围电路实现,通过串口和2台天线控制单元通信,根据串口通信状态向天线控制单元发送主、备设置指令。单片机I/O口通过中间继电器控制驱动单元的上电接触器。当天线控制单元A作为主机工作时,如果A套系统检测有故障或者与切换单元的通信中断,切换单元切断驱动单元A的驱动电源并向B套系统发送主备切换指令,天线控制单元B作为主机马上开始工作,保证通信业务不中断。
2.1 角度同步设计
在常规的地面站天线伺服系统中,一般选用正余弦旋转变压器作为天线角度传感器[2]。旋转变压器的工作原理如图2(a)所示。在激磁电源的作用下,旋转变压器会输出两相正交的的模拟信号,模拟信号的幅值随着转角做正余弦变化,频率和激磁频率相同。模拟信号通过旋转变压器-数字转换(RDC)芯片转换产生数字信号送给计算机处理。通常,轴角信息的处理由天线控制单元来完成,激磁电源也由天线控制单元提供。在使用旋转变压器作为测角元件的伺服系统中要想解决2台天线控制单元角度同步的问题,简单的实现方法有2种:
①2台天线控制单元各自独立提供激磁电源,在切换单元中加入电源切换电路,在切换驱动单元的同时切换激磁电源;
②将激磁电源独立出来,作为公共模块同时为2台天线控制单元供电。
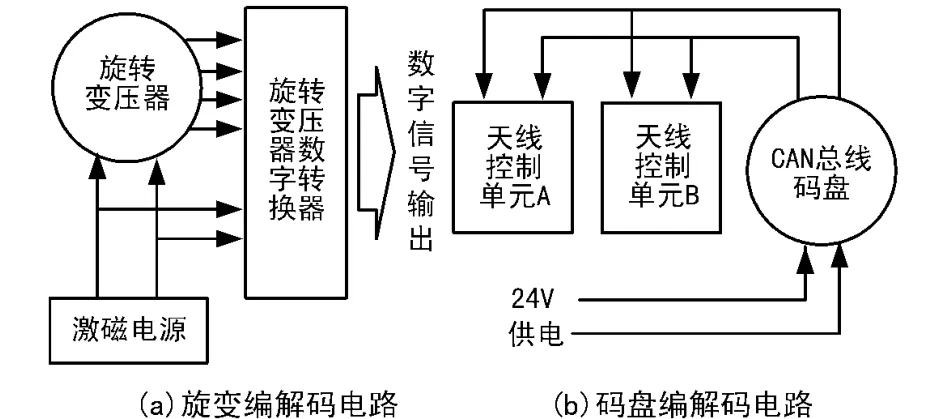
图2 旋变和码盘比较
对上述2种方法进一步分析就会发现不足,作为冗余系统发挥高可靠性的关键部件,希望切换单元工作稳定可靠,电路尽量简单。第1种方法会增加切换单元的复杂度,降低可靠性,而第2种方法会使2套伺服系统的独立性降低。
在本系统中使用CAN总线码盘作为测角元件来实现角度同步。CAN总线是一种支持分布式控制和实时控制的串行通信局域网络[5],具有速率高、可靠性高和实时性好的特性。CAN总线是典型的半双工串行总线结构,采用基于数据的传输方式工作。消息可以在任何时候由任何节点发送到空闲的总线上,被所有的节点接收、判断后决定是否接受这个消息。CAN总线的主要特点:
①CAN总线传输介质为双绞线,通信速率最大到1 Mbps,节点数最多到110个。
②CAN总线节点工作于多主方式,任何一个节点都可以根据总线访问优先权采用无损结构的逐位仲裁的方式竞争向总线发送数据,数据通信实时性强。
③CAN总线的报文采用短帧结构,每帧信息都有CRC校验以及其他检错措施,平均误码率小于10-13,可靠性高。
④出现严重错误时,总线上的节点具有自动关闭总线的功能,切断本节点和其他节点的联系,使总线上的操作不受影响。
如图2(b)所示,挂在总线上的2台天线控制单元会同时收到码盘送出的角度数据,不仅电路简单、易于实现,而且减少了2套系统中的RDC芯片和激磁电源,降低了成本。
2.2 电源冗余和逻辑互锁设计
天线驱动单元内部的逻辑电路和天线座上的码盘使用的24 V直流电源都由天线驱动单元中的24 V开关电源供电。如果2台电源单独使用,则达不到驱动单元冗余的效果,2台电源的输出端也不能简单并联,那样会导致电流倒灌将电源烧毁。常规的电源冗余[3]做法是将电源输出端连接二极管正极并联成“或门”再输出到电源总线上。本系统双电源冗余电路如图3所示。电路中使用大功率金属氧化物半导体场效应管(MOSFET)来代替传统电路中的二极管,MOSFET管的控制芯片选用LINEAR公司的 LTC4357[4]。同二极管相比较,MOSFET 管导通内阻小,大大降低了压降损耗,发热量也小,不用考虑散热问题。
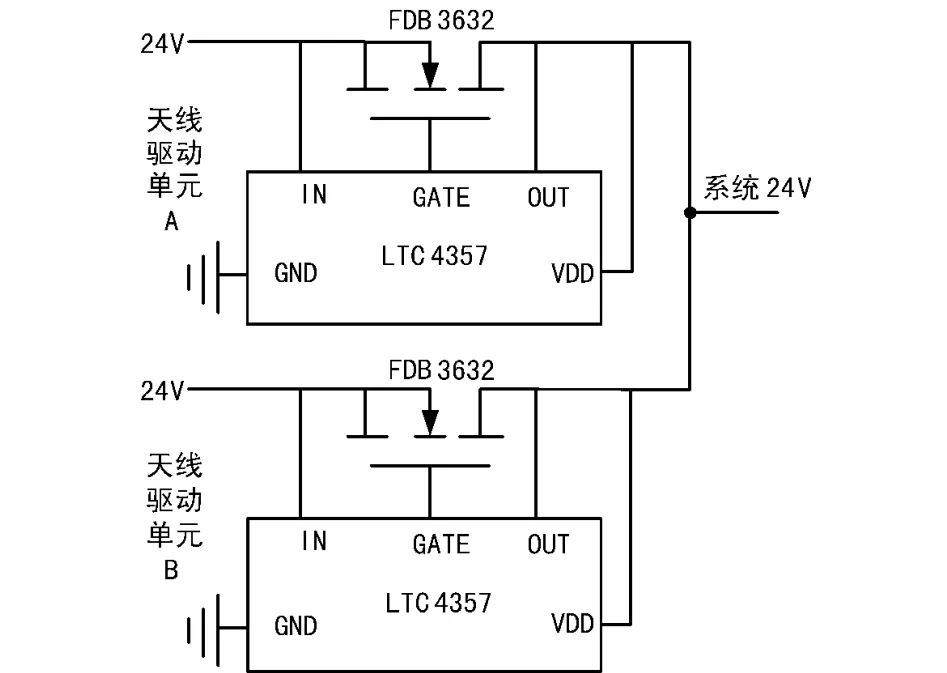
图3 电源冗余电路
因为本系统中2台驱动单元驱动一台电机,必须要设计逻辑互锁电路实现某一时刻只能由一台驱动单元驱动电机转动。在天线驱动单元的电机驱动输出端加上交流接触器,接触器线包上用逻辑互锁电路保证对电机的驱动不冲突。
2.3 数据同步设计
天线控制单元在跟踪过程中不断记录天线指向角度作为记忆跟踪的数据库,这些数据应该在主备机之间实时同步,确保天线控制单元切换平滑,业务不受影响。天线控制单元A、B通过网络设置共享文件来交换数据,并且用心跳程序向对方发送本机联网状态。处于主控状态的主机在写本机文件的同时向备机的共享文件夹写入跟踪数据,由于通过切换单元统筹控制不会出现同时主控的情况,可以避免写文件的冲突,数据通信流程如图4所示。
3 结束语
天线伺服系统通过冗余设计,在切换单元的可靠性足够高的前提下能够缩短MTTR,提高系统的可靠性。冗余天线伺服系统并非2套伺服系统的简单并联,不仅要在硬件电路和软件上实现数据同步、电源冗余和逻辑互锁等功能,而且单套系统本身的工作流程要相应地修改,使得整体的复杂度大大提高。随着卫星通信技术的发展,天线伺服系统需要更长时间地稳定工作,在软、硬件可靠性设计无法进一步提升的情况下,冗余设计是一种有效手段并且成效显著。
[1]李海泉,李刚.系统可靠性分析与设计[M].北京:科学出版社,2003:8-9.
[2]秦继荣,沈安俊.现代直流伺服控制技术及其系统设计[M].北京:机械工业出版社,1993:201-241.
[3]周志敏,周纪海,纪爱华.现代开关电源控制电路设计及应用[M].北京:人民邮电出版社,2005:238-245.
[4]付蔚,刘成涛,王平.基于LTC4357的工业用冗余电源的实现[J].电力电子,2009(2):35-36.
[5]唐继英.现场总线技术[M].天津:天津大学出版社,2008:161-188.
[6]杜振权,宫豫燕.一种新型实用的天线控制器的设计[J].无线电工程,2009,39(2):59-61.