自组织小脑神经网络算法研究
2012-10-20薛先俊杜春锁戚嘉兴
薛先俊,曹 莹,杜春锁,戚嘉兴
(1.中国人民解放军92724部队,山东青岛 266019;2.中国人民解放军72433部队,山东济南 250014)
0 引言
传统的小脑神经网络计算速度快,应用越来越广泛。但是其基函数为常数0或者1,只能记忆静态信息,泛化能力差,精度不高。Chiang和Lin[1]研究一种高斯基函数的小脑神经网络,输入信号根据输入状态空间的范围划分高斯基函数的中心,将输入信号与基函数相关联的对应地址空间里的相应权激活,经过加权得到输出。但是上述神经网络高斯基函数中心点的选取和输入的最大最小值有关,在实际应用中,在线学习不确定时很难预测最大最小值,这样的网络存储空间的大小很难确定,结构不能自动获得,影响学习和控制的性能,因此一些能够自适应地改变神经网络结构的网络受到重视。
Hu和Pratt[2]研究了可以根据输入数据来改变自身结构的方法,但是这种方法运用了不可微分的阶梯性质的基函数,并且只研究了结构增加的方法,没有研究减少结构的方法。C.M.Chen[3]提出了一种自组织的遗传算法的小脑神经网络,运用了信息熵结合黄金分割的方法来决定结构的增加和减少,这种方法的缺点是结构过于复杂,缺乏在线的学习能力。
该文研究了一种自组织小脑神经网络在线逼近非线性函数,这种网络不需要预先确定存储空间的大小,可以根据输入数据自适应地改变神经网络节点数和相对应的权值,具有良好的智能性,并且可以达到全局收敛。针对挠性卫星姿态实例,采用变结构控制,并用神经网络补偿系统不确定性。
1 自组织小脑神经网络算法研究
自组织小脑神经网络是在高斯基小脑神经网络的基础上提出的。如图1为高斯基函数神经网络,输入x是n维空间,输出为:

式中,as为基函数的选择矢量,有C个单元等于1,其余视为0,相当于以输入数据为中心,以C作为边长,作了一个超立方体。其中:

式中,vj为权值,bj(x)为径向基函数,基函数中心点和方差是在已知每维输入空间大小情况下选取的。写成矢量形式:


图1 高斯基函数CMAC
但上述的高斯基函数的小脑神经网络前提是已知了输入X的范围,在实际应用中多数不知道范围大小,在这种情况下,自组织小脑神经网络根据输入大小来增加或者减少节点数。此时:

1.1 增加节点数
已经存在的节点可以叫做族。如果一个新的输入量的值在这个族的范围内,则自组织小脑神经网络不会再产生新的节点,只是改变权值[5,6]。
在联想存储空间中定义:

式中,uk=[u1k… uik… unk]是网络中已经存在的节点。用如下理论来确定节点数的增加。找到:

如果满足M Dk(xs)>Kg,Kg是预定好的最低限度,则产生一个新的节点。这意味着对于一个新的输入数据,如果这个数据跟与族里面的已经存在的节点的中心距离都大于一个设定值,即表示现有的族太小,则需要产生一个新的节点。产生如下的节点:

这里的nk(t)是已经存在的节点数目,新产生的节点的中心和方差设置为:

1.2 减少节点数
考虑第j个输出,定义:比例

式中,yj(x)是第j维输出,vjk(x)是输入数据与第k个中心节点的权值,M Mjk(x)表示这个输入数据与第k个节点的权值在整个输出的比例。可以找到第j个输出中最小的比例,即:

设Kc是预定的上限,如果满足:M(x)≤Kc,则第k个节点应该删除。这意味着,对于一个输出数据,如果某个节点对于输出的贡献小于一个设定的值,则这个节点应该被删除。

2 应用实例
该文将自组织小脑神经网络应用于挠性卫星姿态控制中。挠性卫星姿态控制系统状态方程为:
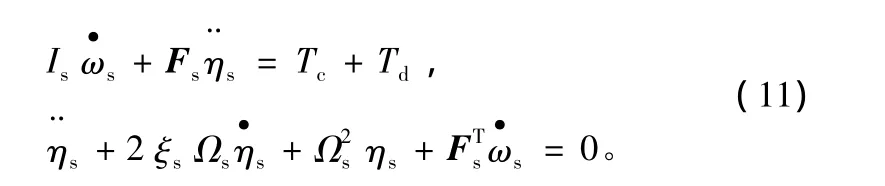
取状态向量x=[x1,x2]=[θ]T,式(11)写成状态方程形式[7]:


选取滑面s=kce+e1=kce+,对s求导,令=0,即=-(Is-)-(Is-Fs)+=0,得到等价的控制力矩:

变结构控制选择为:

式中,Tf为常数,δ为消颤因子。卫星的姿态控制律为:

由于参数ηs、和Is有摄动现象,外界扰动Td未知,因此变结构的鲁棒性不能保证。此时可以用神经网络逼近特性来估计不确定性Tt,设Tnn为神经网络输出,以Tt与Tnn之间的差值来更新神经网络的权值,通过调节权值,实现对干扰力矩的补偿。则等价控制力矩变成:

系统的总控制力矩为:

神经网络与变结构控制相结合,使控制器既具有变结构控制对扰动不敏感的特点,又具有神经网络在线学习的能力,可加快系统响应速度,提高系统的抗干扰能力。
3 仿真分析
该文设计的姿态机动角度为70°,挠性卫星模态为4阶,执行机构为飞轮,控制力矩带有饱和特性。
变结构控制中边界层厚度δ为0.08,滑模面系数kc为0.4,边界层参数Tf为30,神经网络参数xite为0.2,alfa 为 0.08,加节点的时候 Kg为 0.001,减节点的时候Kc为0.00001。
经过仿真,发现在有外加干扰Td=sin(t)时,用滑模控制,不用神经网络补偿时,如图2所示,角度和角速度波动比较大,精度不高。
用自组织小脑神经网络补偿干扰,如图3、图4和图5所示,在80 s角度和角速度达到要求精度,模态幅值为±0.003之间振动,可见神经网络提高了系统的鲁棒性。通过仿真发现,在未知干扰大小的情况下,小脑神经网络收敛速度快,误差小,网络的节点数随着输入的变化而变化,做到了自适应调节节点的目的,最后收敛于一个固定值,而且避免了局部极小的现象。

图2 挠性卫星变结构仿真图(外加干扰sin(t))

图4 神经网络学习误差
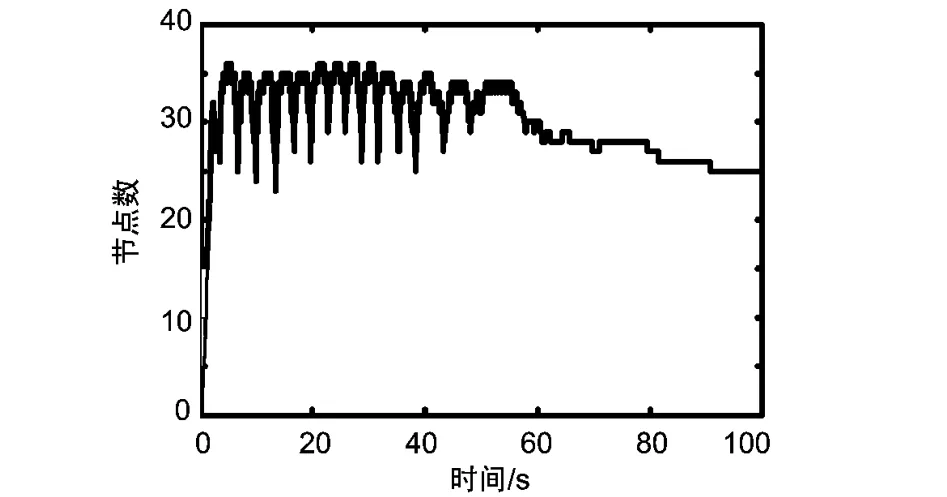
图5 神经网络节点数
4 结束语
该文设计一种自组织小脑神经网络,这种网络计算速度快,可以根据输入自适应增加或者删除节点。针对挠性卫星姿态机动控制,由于外加力矩Td在实际中是未知的,而且变化剧烈,采用自组织小脑神经网络对不确定性进行补偿,得到了良好的控制效果。
[1]CHIANG C T,LIN C S.CMAC with General Basis Functions [J].NeuralNetworks.1996,9(7):1199-1211.
[2]HU J,PRATT F.Self-organizing CMAC Neural Networks and Adaptive Dynamic Control [J].IEEE Intelligent Control,1999:259-265.
[3]LEE H M,CHEN C M,LU Y F.A Self-organizing HCMAC Neural-network Classifier [J].IEEE Trans.,2003,14(14):15-27.
[4]LIN Chin-min,CHEN Te-yu.Self-OrganizingCMAC Control for a Class of MIMO Uncertain Nonlinear Systems[J].IEEE Transactions on Neural Networks,2009,20:1377-1384.
[5]ALEXANDRIDIS A,SARIMVEIS H,BAFAS G.A New Algorithm for Online Structure and Parameter Adaptation of RBF Networks[J].Neural Networks,2003:1003-1017.
[6]QIN Ting,CHEN Zong-hai,ZHANG Hai-tao,et al.A Learning Algorithm of CMAC Based on RLS[J].Neural Processing Leters.2004,19(3):49-6l.
[7]李广兴,周军,周凤岐.挠性卫星高精度智能控制及物理仿真实验研究[J].中国空间科学技术,2007,1:9-13.