基于请求/服务协作模型的多Agent建模方法
2012-10-20宋昌统王辉
宋昌统,王辉
0 引言
智能通信是人工智能领域中研究的一大热点,在多Agent系统中,不同Agent之间的通信是非常必要的,这是实现协作的重要途径。当有多个Agent同时向同一个服务主体提出服务请求,或者Agent向一个正在为其他Agent服务的服务主体提出请求时,被请求的服务主体就需要寻求其他服务主体的帮助,就需要通信和协作,以同时满足不同Agent的请求。因此,Agent具有自主性,反应性,社会性和推理能力等特点,能够用来解决传统的人工智能所不能解决的环境适应性、动态环境推理和规划、信息不完全等问题,使用Agent方法已经成为研究复杂系统的重要手段。
现实生活中大多数系统是属于多Agent 系统,因此研究多 Agent 系统是一件非常有实际意义的事情。本文在ConGolog中显式定义了通信动作,并提出一个请求/服务协作模型,这样,Agent就可以在动态环境下进行面向目标的自主协作行为规划。同时,在ConGolog中引入并发,解决了单个Agent所不能解决的问题。
1 情景的演算
情景的演算是人工智能大师McCarthy在1963年针对动态领域中的问题求解和逻辑程序设计首次提出的,是一个用一阶谓词逻辑描述世界的方法。情景演算方法可以在动态环境下进行面向目标的自主行为推理。直观上,一个情景就是世界的一个快照,在情景演算中使用情景(situation)类表示,而情景的变化是动作(action)的结果,在本体论中,动作是改变事物状态的基本手段,动作函数 do表示为:action×situation→situation。如果在情景s下实行动作a将得到另一个情景s’,那么情景s’可表示为do(a,s)。更多情景演算的概念和情景演算的公理系统参见文献[2]。
2 Golog与ConGolog
2.1 Golog

2.2 ConGolog
Golog语言是针对单个Agent的,其动作之间在时间上的关系只有顺序,在实际的运用中Golog语言受到很多的限制,例如没有感知只能离线规划,在规划的过程中不能再次接受其他的规划任务,尤其明显的是在多Agent系统的开发过程中遇到的并发动作的处理上。为了解决上述的问题,出现了很多新的情景演算语言[5],其中较为有影响的是 De Giacomo和Yves Lesperance等人提出了并发程序设计语言ConGolog。ConGolog在Golog的基础上增加了并发处理,优先级的并发以及中断处理。在ConGolog中,初始情景可以不完全指定,而Agent可以根据情景演算的公理自己定义基本动作。
ConGolog被赋予了一种结构化的操作语义,称为计算语义。根据该语义的“单步变迁”的概念[6],ConGolog引入了两个特殊的谓词 Final(δ,s)和 Trans(δ,s,δ’,s’)。其中 Final(δ,s)表示程序 δ可以合法的终止在情景 s。Trans(δ, s, δ’, s’)表示程序δ在情景s 下执行一步(即执行一个基本动作), 从而将情景s变化到情景s’, 并余下程序δ’未执行。实际上,程序δ和情景s是一个配置空间(configuration)<δ,s >,而trans的作用是通过执行一个可执行的基本动作,将这个配置空间改变成另一个配置空间<δ’, s’>。
使用final和trans谓词的好处不仅在于可以描述Golog语言,更重要的是可以描述并发,带优先级的并发,中断等。在Congolog中并发动作表示为δ1||δ2, δ1和δ2表示两个并发执行的动作,δ1 >>δ2表示δ1和δ2是带有优先级的两个并发动作,其中δ1的优先级高于δ2,当动作δ1执行完或者不能执行时才执行动作δ2。δ||表示多个该动作δ并发执行。Φ→δ表示中断,Φ表示触发条件,δ是中断的处理程序,当触发条件满足时就执行程序δ,否则δ将不会被执行。使用final和trans谓词可以将这四种复杂动作表述为[7]:
(1)并发

(2)优先级并发

(3)多个相同动作并发

可见,多个相同动作的并发是参照了基本的并发动作的语义进行解释的。

(4)中断表示当允许中断时(interrupts_running为真),如果触发条件满足的话就执行程序δ,否则就为false。
3 请求/服务协作的模型
3.1 模型的简介
在请求/服务协作模型中,Agent被分为两种类型,分别为请求 Agent(ReqAgt)和服务 Agent(SerAgt)。其中,请求Agent可以向任何服务Agent提出服务请求,服务Agent也可以为任何请求Agent服务,多个服务Agent之间通过通信动作[8]以协作的方式,共同为请求 Agent提供服务。请求/服务协作模型,如图1所示:
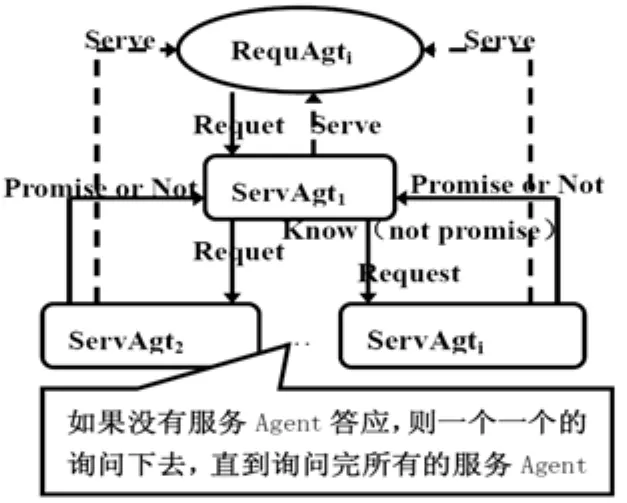
图1 请求/服务协作模型
在该模型中,当有请求Agent向服务Agent提出请求时,服务Agent首先要判断自己能不能完成该请求,如果可以,则不用请求其他Agent,直接交由规划部分进行规划。如果不能完成,此时服务Agent就通过通信方式,请求其他的服务 Agent来完成。也就是说,此时服务 Agent对请求Agent的请求负有责任,由ServAgt1负责请求另外的一个服务Agent(ServAgt2)完成。ServAgt2接到请求后也会根据自己是否能完成该请求来给 ServAgt1进行回复。ServAgt1接到ServAgt2的回复后,根据回复内容进行操作,如果 ServAgt2不同意,那么 ServAgt1就需要询问另外一个服务Agent(ServAgt3),直到有服务Agent答应为RequAgti服务,如果其他所有的服务Agent都被询问过了,而且没有收到肯定的答复,那么就告知 RequAgti系统忙;如果ServAgt2同意提供服务,则将请求中的服务对象换成ServAgt2,然后进入规划。就是说,如果ServAgt2同意提供服务,就表示可以让规划部分安排其为RequAgti服务。
例如,在送咖啡的例子中,请求 Agent1(bill)向服务Agent(waiter1)提出请求 wantCoffee(bill,waiter1),要一杯咖啡,而在waiter1还没有为bill服务完的时候,请求Agent2也向waiter1提出请求wantCoffee(sue,waiter1)。此时,waiter1就需要向其他的服务Agent请求协作,waiter1首先向waiter2提出请求,如果waiter2同意协作,那么就会把自己的名字作为此次通信的结果告知waiter1,waiter1就会将sue的请求waiter1的名字换成waiter2的名字,然后进入规划;如果waiter2在为另一个请求 Agent服务,那么就不同意协作,回答impossible。waiter1在得到impossible的回复后就会请求另外的服务 Agent(waiter3),直到询问过所有的服务Agent,如果还没有肯定的答复,那么则告知sue,此时系统忙,请稍后再次请求。一个服务Agent对于请求Agent的请求的处理过程,如图2所示:
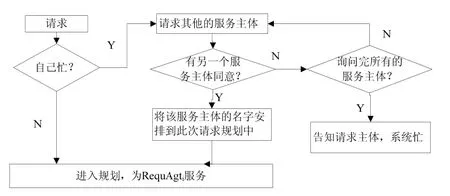
图2 服务Agent对请求的处理流程
3.2 请求/服务模型的协作实现
请求Agent向服务Agent提出请求时,如果Cond条件满足,那么请为我执行任务 Task。接收者Receiver收到该消息后,对条件进行判断,即 holds(Cond,H),如果条件成立,那么将通信结果赋值为愿意完成,如果不成立,则赋值为不愿意。代码,如图3所示:
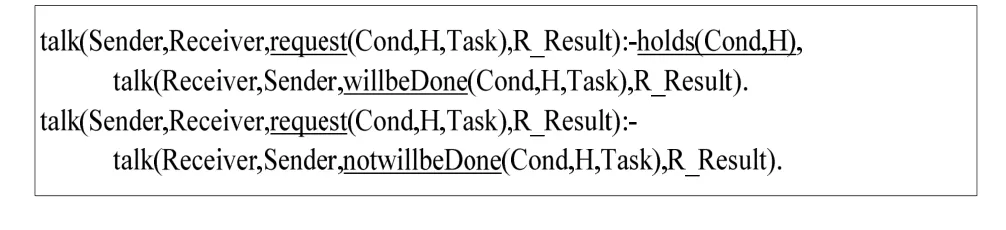
图3 对请求的处理过程
根据通信方式,对于消息的回复,服务Agent只需要将结果赋值给通信结果,不必再进行一次通信。如果发送愿意的消息,那么就表示此次通话的结果是请求得到满足,那么就把同意者的ID赋值给通话的结果,如果不愿意,那么就将另一个结果赋值给通话结果,此处的赋值用户可自定义,本文使用impossible表示不愿意。代码,如图4所示:

图4 根据愿意/不愿意给通话结果赋值
4 实例
为了在 VRML中展现多 Agent的协作行为,本文在VRML虚拟场景中进行了仿真。针对送咖啡的例子,模拟多Agent请求,本实例定义了3个服务Agent,waiter1、waiter2和 waiter3。giveCoffee(Person,Rob)表示主体 Rob把咖啡交给了用户 Person。startGo(Loc1,Loc2,Rob)表示主体 Rob从Loc1走向Loc2,Loc1和Loc2都是地点名称,本文中的地点名称可能是咖啡机 cm,也可能是用户的办公室office(Person)。 下面是Agent之间的协作流程。
(1)流
流的初始值的定义可以使用initially(Fluent,Value)来定义,is_busy(Rob)表示服务Agent忙,needServe(Person,Rob)则表示Person需要Rob为其服务,hasCoffee(Person)表示用户Person此时已经有了咖啡。
(2)外部动作
Exog_action(wantCoffee(person,Rob)):-isPerson(Person),isRob(R ob).其中isPerson(Person),isRob(Rob)是对用户的输入做检查。wantCoffee(bill,waiter1)是合法的外部动作,表示bill请求waiter1为其倒一杯咖啡。
(3) 多Agent交互部分
首先对Agent的请求进行检查exog_action_check/3,看Agent请求的服务Agent(Rob)在当前情景下是否有空,没空的话,那么被请求的 Agent就开始同其他的服务 Agent进行交互,请求他们为该 Agent服务,isRob(Rob2),+(Rob2=Rob1)就表示Rob2是另外的一个服务Agent,请求的消息为 inform(Rob1,Rob2, request(is_busy(Rob2)=off,H,serve_for(Person)),R_Result),表示Rob1,即被用户Person请求但目前忙的服务Agent,向Rob2发送消息,内容为请求Rob2,如果在当前情景下 Rob2不忙,那么请为Person服务,请求的结果存储在变量 R_Result中,如果该变量值不是一个服务 Agent的 ID,那么重新选择一个服务 Agent再次开始请求,如果是,那么就显示成功,将Rob2为Person服务的事情放入动作规划中。
5 结束语
本文基于情景演算理论,在Golog的基础上增加了多Agent的协作,形成ConGolog语言.同时结合中断操作和并发优先,提出一个请求/服务协作模型.为多Agent在响应服务请求时提供了模型支持。解决了ConGolog交替并发和虚拟场景中多Agent动作并发之间的矛盾,使得虚拟场景中虚拟人可以流畅的、并发的执行规划动作。基于情景演算理论探讨的请求/服务协作模型还处于初步阶段,可以做进一步地深入研究。而且,由于协作模型有很多种,可以继续探讨情景演算是否适合于其它协作模型。
[1]杨爱琴,朱玲玲、程学云.基于流演算的多Agent 请求/服务协作模型的研究[J].计算机工程与设计,2011,32(2):681-684.
[2]Wooldridge, M.and Simon Parsons.Language for Negotiation [C].Proc.of 14th European Conf.on Artificial Intelligence, 2000.
[3]Thielscher M.Reasoning robots:The art and science of programmingrobotic agents[M].Germany:Springer Berlin,2005.
[4]ThielscherM.FLUX:A logic programmingmethod for reasoningagents [J].Theory and Practice of Logic Programming, 2005,5(4-5):533-565.
[5]Schiffel S,Thielscher M.Interpreting golog programs in flux[C].7th International Symposium on Logical Formalizations of Commonsense Reasoning,2005:193-198.
[6]Cohen P R, Perrault CR.Elements of a plan-based theory of speech acts[J].Cognitive Science,1979,3(3):177-212.
[7]Reiter R.Knowledge in action: logical foundations for specifyingand implementing dynamical systems[M].MIT Press,2001.
[8]杨爱琴.基于流演算的多agent 通信动作的研究[J].计算机工程与设计,2010,31(1):221-224.