双轴转台几何误差数学建模与解耦研究*
2012-10-20高秀峰刘春时林剑峰
高秀峰 刘春时 李 焱 林剑峰
(沈阳机床(集团)设计研究院有限公司,辽宁沈阳 110142)
1 双轴转台几何误差
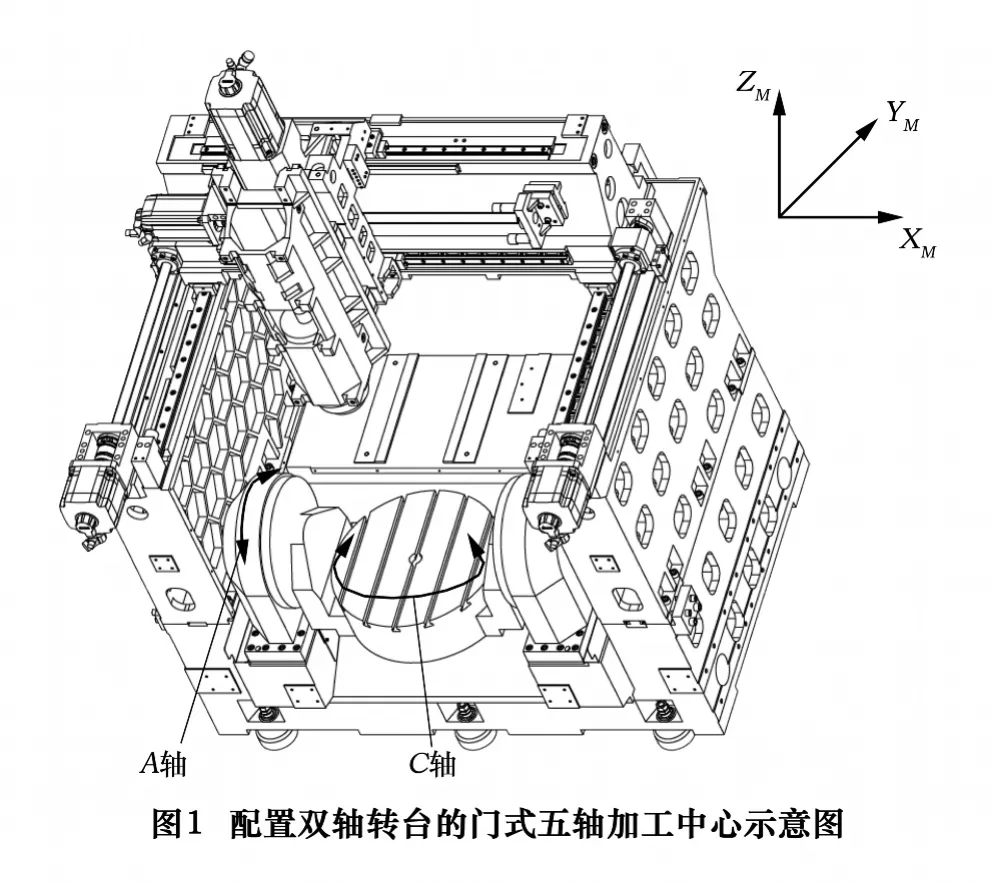
以我公司自主研发的配置双轴转台的门式五轴加工中心为例,如图1所示,双轴转台包括围绕Z轴旋转的C轴以及围绕X轴摆动的A轴,C轴与A轴的联动可以带动工件实现复杂曲面加工。门式五轴加工中心在配置双轴转台之前仍存在多项三轴机床误差,为防止三轴机床误差与双轴转台的几何误差耦合在一起,并为简化计算,因此,门式五轴加工中心在配置双轴转台之前,应当对三轴机床的各项误差进行检测与补偿。
去除三轴机床各项误差的影响,双轴转台内部几何误差以及与机床之间的安装误差如表1所示。
表1中,δxAM表示A轴轴线与机床在X方向产生的位置误差,其他位置误差符号含义与此相同。αAM表示A轴轴线与机床围绕X轴产生的角度误差,其他角度误差符号含义与此相同。
表1 双轴转台与门式五轴加工中心几何误差表
2 双轴转台几何误差数学模型与解耦
2.1 双轴转台几何误差数学模型
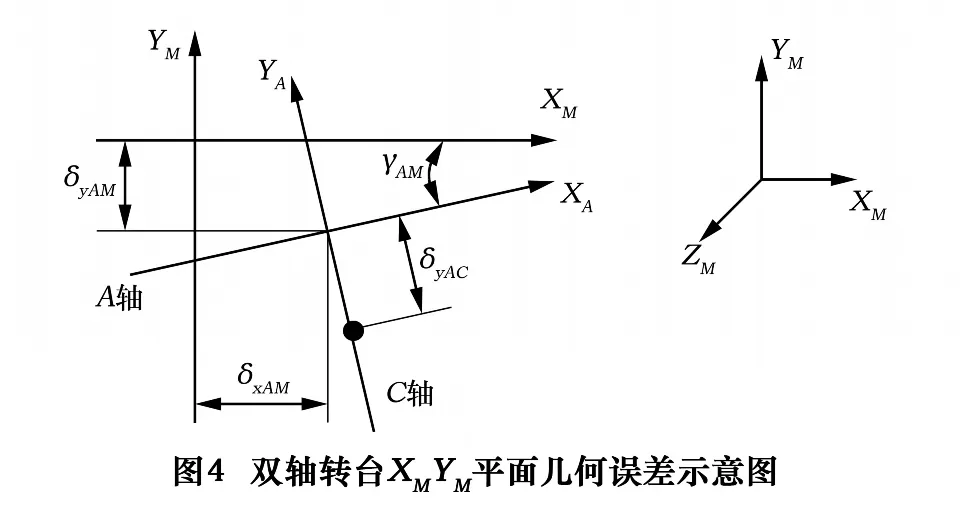
将双轴转台的各项几何误差分别分解到机床坐标系的YMZM平面、XMZM平面与XMYM平面上,各几何误差如图2~4所示。
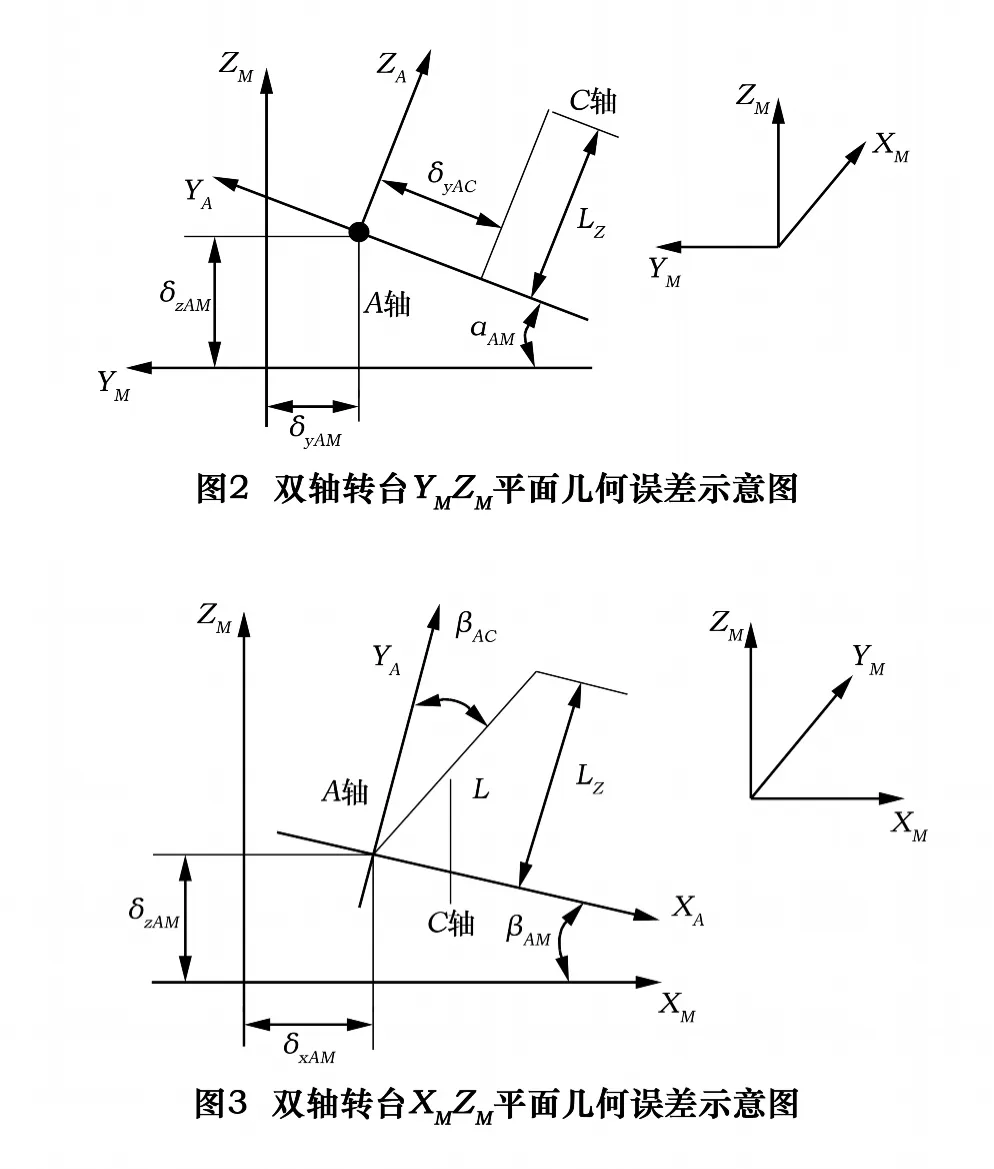
根据图3可以得到如下关系式:

其中:L为球杆仪工作台侧球心与A轴轴线的距离。
2.1.1A轴几何误差数学模型
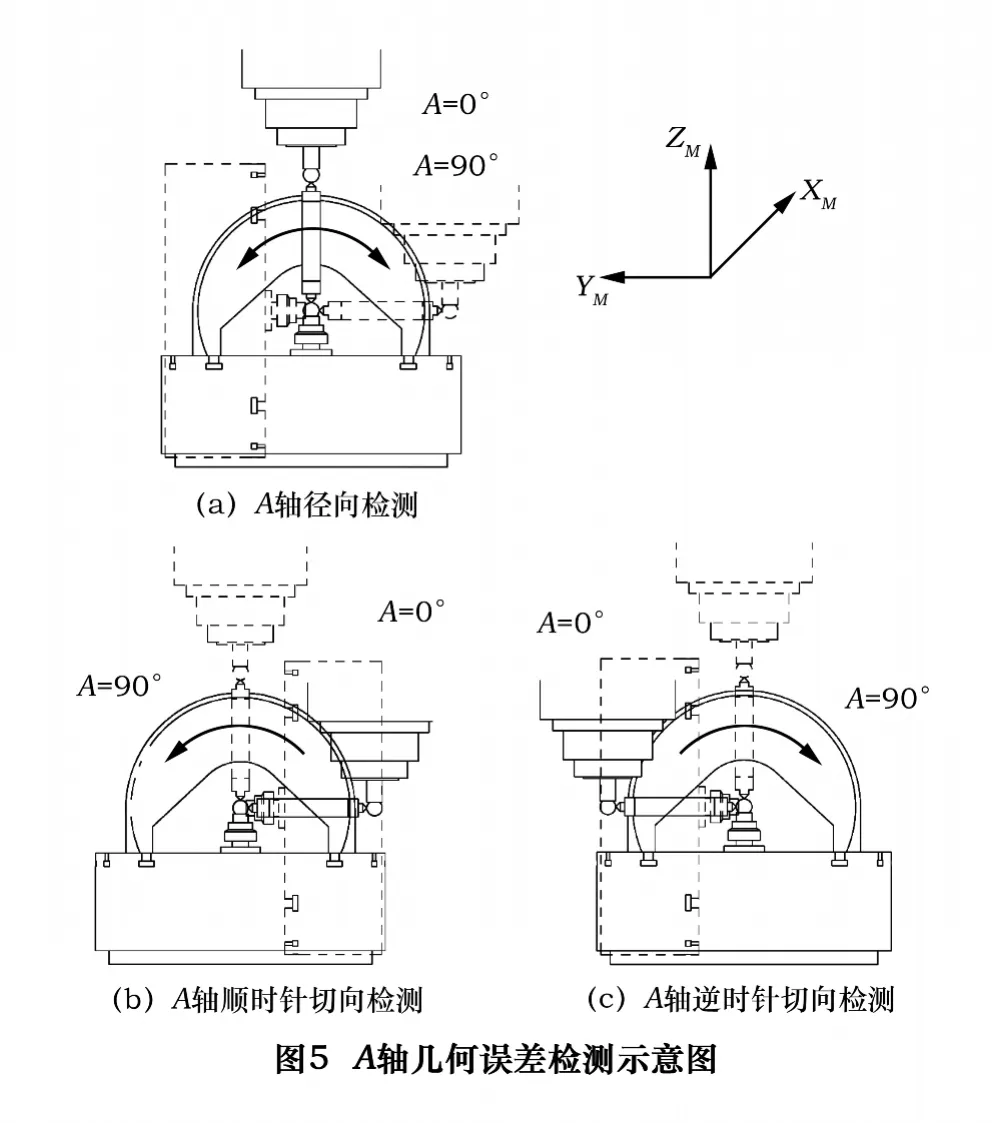
当C轴位于0°时,分别顺时针与逆时针旋转A轴从0°到90°与-90°,并利用球杆仪分别测量YM方向与ZM方向的A轴径向与切向综合误差(如图5所示)。然后通过将A轴位于0°、90°与-90°时球杆仪的测量值减去球杆仪测量球杆的理论长度R,便可以得到位于机床坐标系下的YM方向与ZM方向A轴综合误差LYA0、LYA90、LYA-90、LZA0、LZA90与LZA-90。其中,LYA90、LYA-90与LZA0为A轴径向综合误差;LYA0、LYA90与LZA-90为A轴切向综合误差。
由图2、图3与图5可知,并考虑双轴转台与机床坐标系之间的角度误差αAM,A轴综合误差在机床坐标系的YMZM平面内各项几何误差之间的耦合关系如图6所示。
综上可见,消费主义生活方式是一种以购物和消费为主要内容,以过度消费、奢侈消费、炫耀消费为具体表现,具有占有性、破坏性的生活方式。科布认为,社会的整个推动力是经济进步,但这种单一唯度的进步意味着生态灾难[13]。加里·加德纳也认为,我们今天看到的大多数环境问题都能跟消费扯上关系[14]。这些论断表明:消费主义生活方式既是工业文明生活方式的主要表现,也是造成全球生态危机的罪魁祸首。
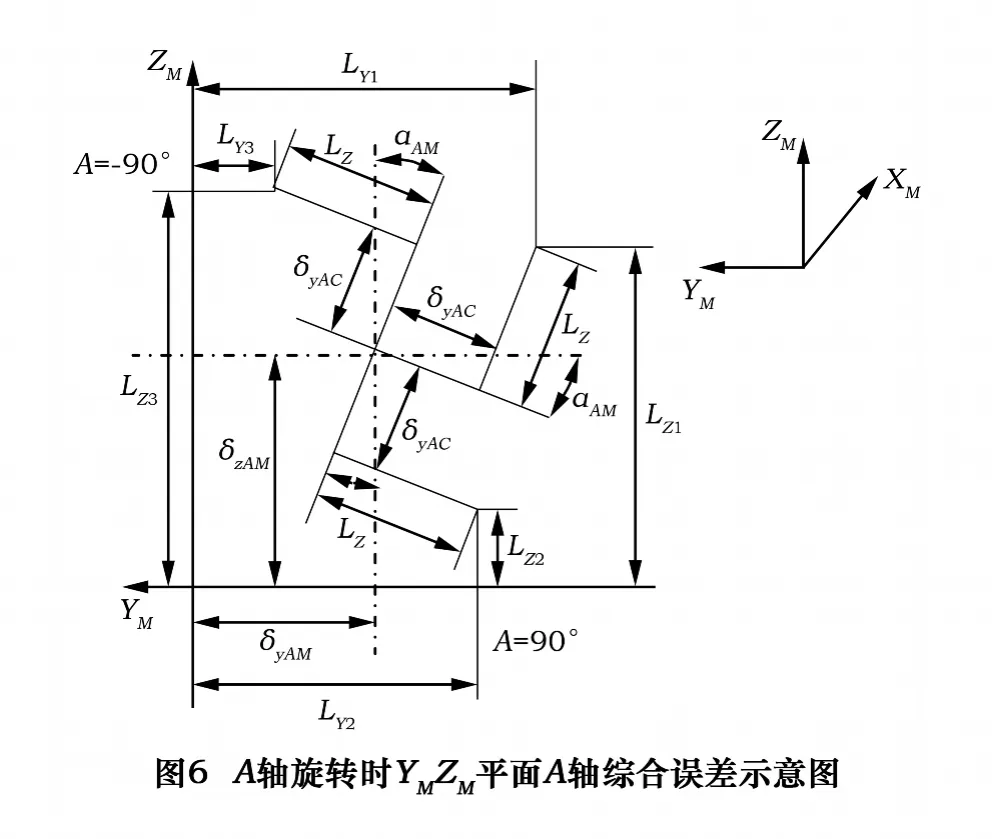
由图6可以分别得出在机床坐标系的YM方向与ZM方向A轴综合误差,各项误差如式(2)~(7)所示。
考虑A轴坐标系与机床坐标系之间的角度误差βAM与 γAM,有

2.1.2C轴几何误差数学模型
当A轴与C轴均位于0°时,旋转主轴围绕C轴从0°到270°,并利用球杆仪如图7所示分别测量XM方向与YM方向的C轴综合误差。然后通过将C轴位于0°、90°、180°与 270°时球杆仪的测量值减去球杆仪测量球杆的理论长度R,便可以得到位于机床坐标系下的XM方向与YM方向C轴综合误差LXC90、LXC270、LYC0与LYC180。

由图4与图7可知,C轴综合误差在机床坐标系的XMYM平面各项几何误差之间的耦合关系如图8所示。
由图8可以分别得出在机床坐标系的XM方向与YM方向C轴综合误差,各项误差如式(14)与式(15)所示。
2.2 双轴转台几何误差解耦
通过分析双轴转台各几何误差之间的耦合关系,并借助于球杆仪分别测量出各个误差敏感方向的综合误差值,建立了式(1)~(17)的双轴转台几何误差数学模型。从数学模型中可以看出,各几何误差均耦合在一起,求解较困难。为简化求解过程,采取逐步求解的方法,进而达到最终求解出全部几何误差的目的。
通过分析图2,可知αAM表征A轴位于0°时的定位误差,因此,αAM可以借助A轴定位误差检测与补偿加以解决。同理,γAM可以借助C轴定位误差检测与补偿加以解决。
通过A轴与C轴定位误差检测与补偿后,双轴转台只包括4项位置误差与2项角度误差,共6项误差值,式(1)~(17)几何误差数学模型得到了极大简化,使得各几何误差求解更为容易。
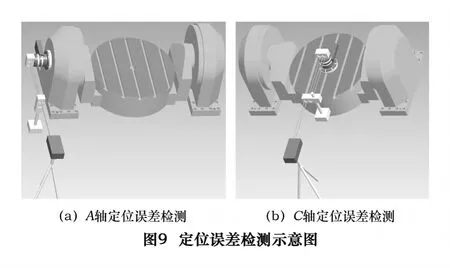
A轴与C轴定位误差可以借助激光干涉仪与RX10回转基准分度器进行检测,详如图9所示。将检测到的定位误差值输入到数控系统中便可以进行相应的定位误差补偿。
A轴与C轴定位误差经过补偿后,则有αAM=0,γAM=0。通过化简与求解方程(1)~(17),双轴转台各项几何误差最终结果如下:


3 结语
双轴转台在装配完成后,A轴轴线、C轴轴线、以及配套机床之间存在4项位置误差、4项角度误差以及2项定位误差,通过分析各几何误差之间的几何关系,并借助于球杆仪对各误差敏感方向进行综合误差检测,可以建立双轴转台几何误差数学模型,但由于各几何误差耦合在一起,因此,求解较困难。通过激光干涉仪与RX10回转基准分度器对A轴与C轴的定位误差进行检测与补偿,使得几何误差总数由10项减少为6项,使得数学模型得到了极大简化。因此,最终可以通过几何误差数学模型求得各几何误差值。
[1]王民,胡建忠,昝涛,等.五轴数控机床运动误差建模与测试技术[J].北京工业大学学报,2010,36(4):432-439.
[2]MASAOMI Tsutsumi,AKINORI Saito.Identification of angular and positional deviations inherent to 5-axis machining centres with a tiltingrotary table by simultaneous four- axis control movements[J].International Journal of Machine tools&Manufacture,2004,44:1333 -1342.
