无人驾驶直升机的飞行控制算法
2012-10-17刘明亮李克媛关妍妍
刘明亮,李克媛,关妍妍
(黑龙江省电子工程高校重点实验室,哈尔滨 150080)
0 引 言
无人驾驶直升机具有强耦合、非线性、多输入多输出的复杂特点,对其飞行状态的研究至关重要。在复杂的飞行状态下,由于无人驾驶直升机自身的不稳定性,应该具备良好的飞行控制系统,良好的飞行控制系统可以很好地改善直升机的飞行品质、迅速完成飞行任务。为了更加精确地确定飞行的姿态、速度、高度和航向,一直以来,控制工程师们都在寻找更好的无人驾驶直升机的飞行控制算法。国外的许多科研机构分别开展了对小型无人驾驶直升机的研究工作,研究人员基于所建立的微小型无人直升机数学模型,提出了多种控制算法,做出了多种尝试。卡耐基梅隆大学研究人员设计生产的小型无人驾驶直升机,主要利用PID控制算法并对控制器的参数进行了优化;麻省理工学院采用模型直升机,用卡尔曼波滤器提高了导航的精度,采用小波神经网络控制的算法对直升机的内环姿态进行控制;NASA的Ames无人驾驶直升机研究中心将带模型逆前馈的显模型跟踪方法应用到ADOCS项目上,实现了黑鹰直升机的飞行控制[1-2]。文章对经典的PID控制算法、模糊PID控制算法、自抗扰控制算法、小波神经网络控制算法、带逆模型前馈的显模型跟踪控制算法、H∞回路成形控制算法在飞行控制中的应用进行了分析[3]。
1 经典PID控制
PID控制算法具有结构简单、可靠性强等优点,被广泛应用在工程中的各个领域。PID调节器包含一个比例环节、一个积分环节、一个微分环节。主要通过偏差的比例、积分、微分进行线性组合对被控对象进行控制。PID控制器见图1。

图1 PID控制器Fig.1 PID controller
如果被控对象的参数不能完全确定,被控对象的数学模型很难精确地获得,采用PID控制方法最为有效。PID控制器通过比例、积分、微分求出控制量,目的是提高系统的频响特性。基于PID控制算法的飞行控制系统主要由3个控制回路构成:①姿态控制;②速度控制;③高度控制。为更精确地获得无人驾驶直升机的状态信息,达到更好地控制效果,采用一个爱普科佳斯EMI滤波器对直升机的状态信息进行滤波[4]。基于PID控制算法的飞行控制系统框图见图2。
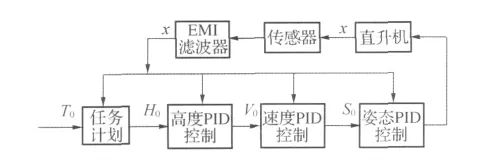
图2 PID控制算法的飞行控制系统框图Fig.2 Flight control system block diagram of the PID control algorithm
本文基于经典PID控制方法,设计了一种无人驾驶直升机的飞行控制系统,主要包含姿态、速度、高度的控制,能实现无人驾驶直升机的位置悬停、转弯与起飞等飞行控制功能。
2 模糊PID控制
经典PID控制器的结构比较简单而且鲁棒性比较强,但其在静态和动态性能以及跟踪设定值与抑制扰动能力之间存在矛盾,使系统不能达到预期效果。模糊PID控制算法基本设计思想是结合模糊理论和PID控制两者的优点,其响应特性比数字PID控制更优越,并且具有较好的鲁棒性。模糊PID控制算法对于非线性、时变性的被控对象能够获得较满意的控制效果。控制功能主要根据被控过程的运行状态给出合适的控制量;学习功能主要根据给出控制量的控制效果,对控制器的控制决策进一步改进。模糊PID控制算法主要通过控制飞行中的参数,实现对无人驾驶直升机姿态、速度、高度的控制,系统框图见图3。

图3 模糊PID控制算法系统框图Fig.3 Fuzzy PID control algorithm system
模糊PID控制具有快速性和良好的稳态精度,改变了模糊控制在控制小偏差范围时精度不高的特点,可以有效增强抗干扰能力,针对无人驾驶直升机这种控制方法具有很大的推广意义[5]。
3 自抗扰控制 (ADRC)
自抗扰控制器依据期望轨迹和实际轨迹误差大小及方向来控制,是通过过程误差来抑制或消除误差的方法。自抗扰控制具有特殊的优点,在许多方面得到了应用。自抗扰控制器包括安排过渡过程,扩张状态观测器 (ESO),非线性组合3个部分。自抗扰控制器的结构框图见图4。
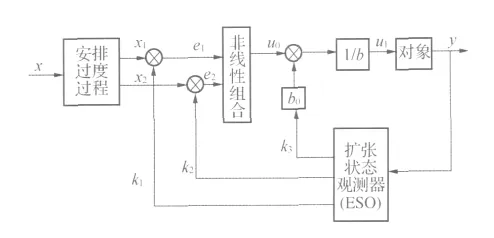
图4 自抗扰控制器的结构框图Fig.4 ADRC structure block diagram
自抗扰控制算法在无人驾驶直升机导航控制中利用了ADRC强的干扰补偿能力,与PID控制器相比,抗干扰能力明显增强。由于导航控制系统模型的不确定性、外界干扰能力强,无人驾驶直升机的航向控制问题是个难点,所以基本的控制方法很难取得好的效果。由于ADRC控制器不依赖精确的数学模型,ADRC能够很容易进行解耦控制,所以经常把自抗扰控制算法应用在导航控制中。自抗扰控制参数的准确设定对于导航控制起着至关重要的作用:主要包括跟踪微分器参数整定;扩张状态观测器的参数整定;非线性反馈控制率的参数整定[6-8]。根据二阶自抗扰控制器的结构、导航运动的数学模型,使用Matlab中Simulink搭建了自抗扰导航控制系统见图5。

图5 基于自抗扰控制器的导航控制系统Fig.5 Navigation control system of ADRC controller
运用自抗扰控制算法,搭建了导航控制系统。从而进行控制量的动态补偿,有效地消除了模型的误差及外界干扰对控制效果带来的影响,能够保证直升机正常飞行[9-10]。
4 小波神经网络控制
小波变换是空间和频率的局部变换,小波变换能够有效地从信号中提取有效的信息。通过伸缩、平移、角度变换等运算功能对所研究的对象进行细微的分析,而神经网络具有自适应性、鲁棒性好等优点,如能把二者有效的结合在一起,将其应用在无人驾驶直升机的飞行控制算法中,能够提高直升机的飞行控制能力。首先用小波对信号进行预处理,然后提取特征向量送入神经网络[11-12]。小波神经网络是以小波函数为基底的一种函数型网络,具有2个优点:①小波神经网络可以避免BP神经网络结构设计上的盲目性;②小波神经网络可以避免局部最优等非线性问题[13]。小波神经网络算法应用在无人驾驶直升机中,主要用于对直升机姿态的控制,包括角度、速度等。基于小波神经网络算法可以控制直升机的姿态,能够改善飞机在姿态控制中的稳定性[14]。利用小波神经网络控制算法控制直升机的姿态框架图见图6,图中滤波器是用来产生理想输入并且限制其幅度[15]。
5 带逆模型前馈的显模型跟踪控制
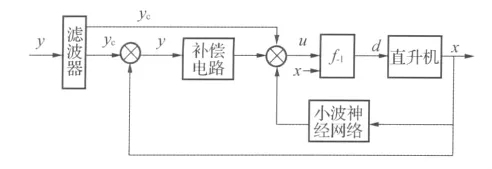
图6 小波神经网络控制直升机的姿态Fig.6 Wavelet neural network control helicopter gesture
模型跟踪分为隐模型跟踪控制与显模型跟踪控制。隐模型跟踪是将理想的控制目标模型隐式地包含在控制系统中;显模型跟踪是将理想目标模型显式地设计在控制系统中,应用反馈控制,使无人驾驶直升机的飞行状态与显模型的输出状态相同。显模型跟踪设计方法主要分为经典的单回路设计方法、LQ最优设计方法和带逆模型前馈的设计方法。带逆模型前馈的显模型跟踪控制比传统的显模型跟踪控制增加了逆模型前馈模块,反馈模块用来补偿模型的差异,实现了基本的控制性能[16]。图7为显模型跟踪的控制框图,控制系统分为4个模块:被控对象模块、对象逆模块、前馈模块和反馈模块。
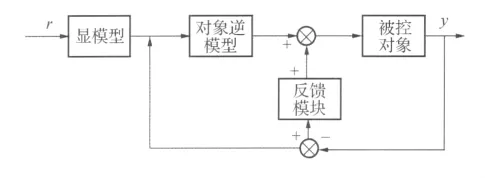
图7 显模型跟踪的控制框图Fig.7 Significant model tracking control block diagram
显模型跟踪控制采用逆模型前馈,因为无人驾驶直升机对象的高度复杂性,其对象的逆模型建立不可能十分精确,因此仍需反馈控制来补偿逆模型的误差。这种控制算法建立的难点在于逆模型的获取,由于对象都是非线性和不稳定的,并且耦合能力强,不确定性高,所以逆模型很难求解。由于逆模型的简化处理,所以逆模型在高频段准确度不高,这种方法的高频控制性能不强。该方法没有仔细考虑系统的不确定性,所以其鲁棒性能不足。
6 H∞回路成形控制
H∞回路成形是指根据要求指定系统的开环传递函数,用H∞设计来保证系统的特性。H∞回路成形控制是将经典控制理论与鲁棒性控制相结合,进行控制系统设计的一种方法。H∞回路成形控制方法的设计过程不用考虑系统闭环频率特性,其设计方法简单。H∞回路成形控制主要采用前置模块与后置模块来配置控制变量的变化,目的是获得良好的分布曲线[17]。H∞回路成形控制框图见图8。

图8 H∞回路成形控制Fig.8 H∞loop shaping control
H∞回路成形控制中控制器有前向与反馈控制器,既能保证鲁棒性,又能提高抗干扰能力。H∞回路成形的设计流程分为3个步骤:回路成形、鲁棒镇定、组合H∞控制器。由于在飞行过程中要求对象飞行状态变化的多样性,控制律只能根据某些状态点设计,但不能保证全局控制的最优性。在设计完控制器之后,必须做大量仿真,来有效的验证控制系统的正确性[18]。
7 控制算法对比
无人驾驶直升机是一个典型的强耦合、非线性、多输入多输出的复杂高阶系统。为了设计出先进的飞行控制器,以寻求更好的控制效果。在直升机数学建模的基础上,针对控制对象的特点,对直升机模型的控制算法进行了比对。对比结果见表1。
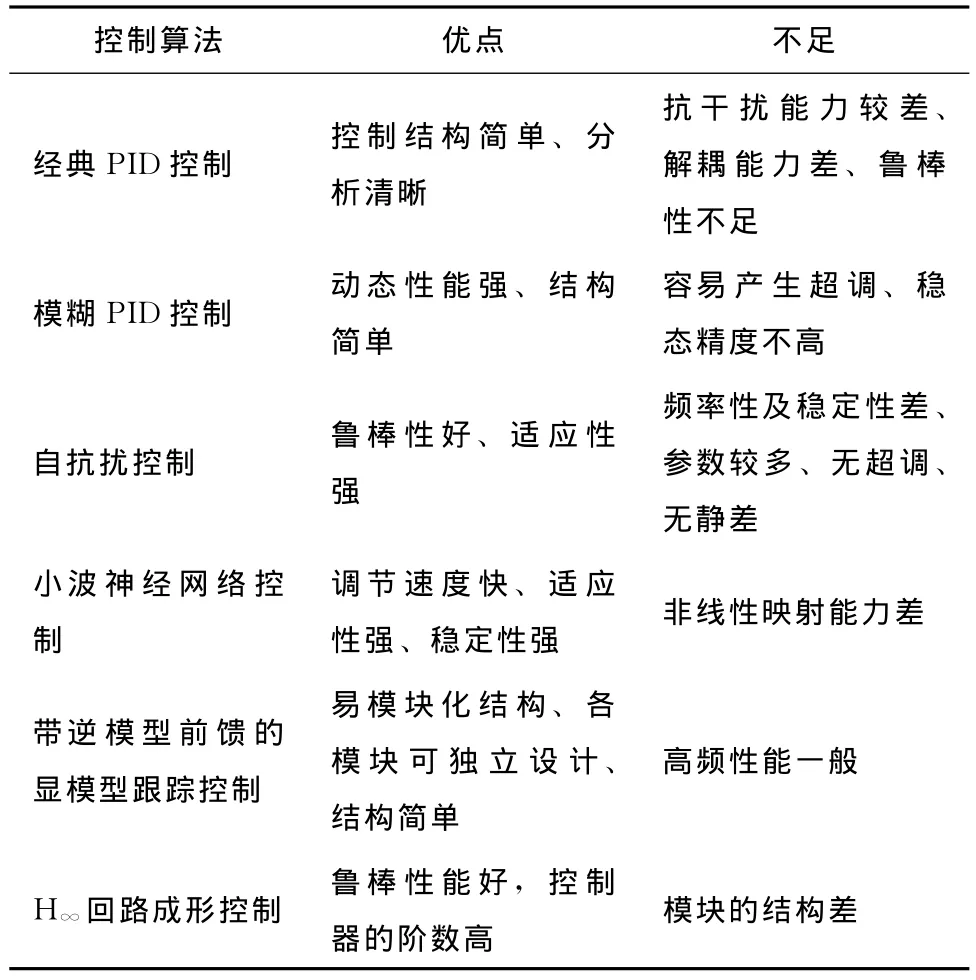
表1 控制算法对比情况Table 1 Control algorithm contrast
8 总结与展望
无人驾驶直升机无论是在工业上还是在国防上都具有广泛的应用价值。由于无人驾驶直升机的飞行控制系统具有易于控制和实验性强的优点,所以我们必须在控制算法上进行深入与持续的研究。其难点是对无人驾驶直升机的控制模型进行控制算法的改进和选取,设计先进的控制器,以寻求更好的飞行控制效果。无人驾驶直升机飞行控制系统研究是一个长期的课题,目前只是对模型直升机的姿态控制做了初步探讨。要得到无人驾驶直升机在其它飞行状态下的控制算法,还要将它的全面运动方程考虑在内,并针对飞行器各部分的应用特点结合设计。通过有效地选择飞行控制算法,可以提高无人驾驶直升机的可靠性、精确性和有效性。带逆模型前馈的显模型跟踪控制算法和H∞回路成形控制算法的鲁棒性较强,是目前应用在直升机飞行控制系统中比较先进的控制算法。若能将多种飞行控制算法相结合,就能够更有效地完成飞行模型的控制。总之,随着飞行控制算法的不断完善和进步,无人驾驶直升机飞行控制技术也正朝着数字化、综合化和智能化的方向发展。
[1]任倩倩.无人直升机建模与控制方法研究 [D].大连:大连理工大学,2010.
[2]辛哲奎,方勇纯.基于视觉的小型无人直升机地面目标跟踪技术研究 [D].天津:南开大学,2010.
[3]王小青,杨一栋.无人直升机建模与控制技术研究[D].南京:南京航空航天大学,2009.
[4]Wei-Der Chang.A multi-crossover genetic approach to multivariable PID controllers turning[J].Expert Systems with applications,2007,33(3):620-626.
[5]Zhijun Sun,Rentao Xing,Chunsheng Zhao.Fuzzy auto-tuning PID control of multiple joint robot driven by ultrasonic motors [J].Ultrasonics,2007,46 (4):303-312.
[6]张立明,严浙平.自抗扰控制技术在AUV航向控制中的应用 [D].哈尔滨:哈尔滨工程大学,2009.
[7]石晨曦,杨慧中.自抗扰控制算法及控制器参数 [D].无锡:江南大学,2008.
[8]关 昕,李衍杰.小型无人直升机悬停控制算法研究[D].哈尔滨:哈尔滨工业大学,2010.
[9]H.Q.Wang,D.B.Wu,A.A.Mian,et al.Multi-mode flight control for unmanned helicopter based on robust H∞D stabilization and PI tracking configuration [J].Space Research Journal,2008,1(1):39-52.
[10]Cai G,Chen B M,Peng K,et al.Modeling and control of the yaw channel of a UAV helicopter[J].IEEE Transactions on Industrial Electronics,2008,55(9):3 426-3 434.
[11]Anna Wang,Junfang Liu.Algorithms comparison of feature extraction and multi-class classification for fault diagnosis of analog circuit[C]//Proceedings of 2007 International Conference on Wavelet Analysis and Pattern Recognition,2007:566-527.
[12]Kugarajah T and Zhang Qinghua.Multidimentional wavelet frames[J].IEEE Trans N N,1995,6(6):1 552-1 556.
[13]Kreinovich V,Sirisaengtaksin O,Cabren S.Wavelet neural networks are asymptotically optimal approximators for functions of one variable[A].Proceeding of IEEE ICNN [C].Florida,USA:1994:299-304.
[14]郑凌蔚,刘士荣.基于改进小波神经网络的关伏发电系统非线性模型辨识 [J].电网技术,2011,35(10):158-164.
[15]刘立生,杨宇航.小波神经网络的直升机主减速器故障诊断系统 [J].航空动力学报,2012,27 (6):1 255-1 260.
[16]Rozak J N,Ray A.Robust multivariable control of rotorcraft in forward flight[J].Journal of the American Helicopter Society,1997,42(2):149-160.
[17]C.Zhu,M.Khammash,V.Vittal,et al.Robust power system stabilizer design using H∞loop shaping approach[J].IEEE Transactions on Power Systems.2003,18(2):810-818.
[18]朱 华,杨一栋.H∞回路成形法设计直升机飞控系统 [J].计算机仿真,2007,24(7):61-65.
