模糊PID控制结构分析
2012-10-16徐立军何颖
徐立军,何颖
(新疆工业高等专科学校,新疆 乌鲁木齐,830091)
尽管已经进行了大量的研究并提出了大量的解决方案,大多的工业控制系统仍然使用传统PID控制,据估计,PID控制器的使用率在90% -99%之间。然而,因为工业控制过程普遍具有综合性、复杂性,随时间而变化、延迟,且是非线性及无规律动态性的特点,PID控制器不可能为所有控制问题提供一个总的解决方案。当这个控制过程太过复杂,甚至无法用分析模型进行描述时,传统的方法很可能就失效了[1]。因此,经典控制理论能够简化工厂模式,却不能保证控制效果。工厂仍然需要控制操作人员。但是,人的控制能力并不稳定,易受操作员经验和职业技能的影响,因此,在许多实际应用中,传统PID控制不能对系统进行有效的调节,而运用人工智能技术则能够将操作者的工作自动化。介于人工智能和控制工程技术之间的模糊控制理论,其有效性已被工程实践证明。根据《日本仪器控制工程协会》对日本控制技术行业的调查,模糊控制(FC)与神经网络控制(NNC)是控制工程技术中发展最快的领域之一[2]。作为过程控制的方法,模糊控制的吸引力在于:模糊控制有效地支持了编码转换,即将一个有经验的操作工所积累的知识和控制程序,转换为十进制数字。在一个典型的PID工业控制系统设计中,控制参数被提前设定,然后为了达到理想的响应,这些参数被手动调节。在Copeland和Rattan所描述的方法中,人工调节可被由FC监控的调节过程取代。通过在线对FC参数进行调节,控制系统的响应得以改善[3]。
1 模糊控制器的设计方法
FC设计至今仍然类似一门艺术而未形成一项技术,因而设计者的能力扮演着至关重要的角色。究其原因如下:
模糊控制理论,特别是模糊设计理论仍远不够完善,也未被深入研究。C.-C.Lee在他的研究中指出:“缺乏FC设计的系统性设计步骤”。Brehm认为:“设计方法仍处于雏形,在某些方面仍靠直觉”[4]。最近Patryra等人的研究及国外多篇专门针对模糊PID设计的论文证实了FC设计分析中数据可靠性的缺乏。Verbruggen和Bruijn对当前的模糊控制研究状况及其与传统PID控制的关系进行了卓有成效的研究[5]。
模糊控制设计是一种边缘技术,许多学科及工程设计方法如人工智能(专家系统)、控制工程和优化理论都牵涉其中,将这些不同的方法结合运用,能够极大地丰富模糊控制技术,并带来崭新与令人瞩目的成果。然而,隐藏在这些不同方法背后的,是不同的研究群体、不同的技术以及各自的评价标准,并且各研究群体之间彼此缺少了解(甚至有时可能会产生误解)。
FC设计方法大致可分为专家法、控制工程法、中介法、整合法和同步法。
第一种方法来源于专家系统法。它将FC视为一个问题解决型的专家系统。在该方法中,用模糊集来代表控制人员的知识和行为,可仅凭模糊集进行操作,人工智能和认知科学的所有理论性和实践性方法在专家系统中得以应用。应该注意到,通过使用语言变量,模糊规则为人类思维和语言提供了一个自然的框架结构,许多技术人员发现,使用模糊控制规则可以方便地表达他们的专业知识。因此对一个知识丰富的工程师来说,使用专家法会使设计工作变得更加容易。这种方法在FC初期设计非常流行。
在一个纯粹的专家法中,结构、输入、输出和其他FC系统参数的选择仅仅是专家的职责。而且,该方法的支持者们反对过细的参数调节,他们认为,这样调节会破坏专家的指令。例如,改变控制参数或隶属函数,可能会导致模糊规则表中数据意义丧失或混乱,从而导致系统无法识别那些经过调节的规则,进而无法制定新规则。
控制工程法的支持者反驳上述方法太过主观,易于出错,并尝试建立一些可供选择的客观标准。该方法提出,FC的设计应该基于研究各种表征值的稳定性和表现,从而决定不同的FC参数,因此,该方法确定FC的分析是FC设计的重要程序之一。该方法采用模糊综合评价法对FC控制质量进行评价。
中介法认为应该由专家设置参数,并用控制系统法确立其他规则。其方法包括FC结构和参数的初始选择,进一步的调节由控制工程法进行。这些方法的发展促进了计算机辅助模型的应用,通过计算机辅助工具,模型整合了专家系统、神经网络和模糊逻辑的特性。ARTMAP[6]即是这样一个例子,通过有机体的神经网络,能够快速学习辨识,测试假设,预测趋势非平稳时间序列的计算机模拟量或数字量输入的响应。
上述模糊控制方式已混合运用到了控制工程实践领域。当设计一个工业用传统PID控制器时,设计者要首先设定好控制其参数,然后手动调节参数使系统响应接近期待值,如果用模糊控制来代替手动调节过程,通过模糊控制参数的在线调节可以显著改善系统响应。在这里需要特别强调的是,直到现在,在设计的初期阶段,专家控制法仍然被普遍采用并不断被改进。
结合AI(人工智能)和控制工程的特点,在模糊控制器设计中,AI可以使工程师经验模糊化,并用自然语言来构建设计框架,这使得模糊控制的作用变得越来越重要,尤其是在控制器设计过程中,模糊控制的设计方法变得越来越容易掌握并日臻成熟,而对于设计人员来说相对传统PID控制也更加具有吸引力。
控制工程领域传统标准仍然适用于模糊控制的设计,包括对与超调、积分和稳态误差等参数的调节设计方法也在进一步发展当中,而加强模糊控制的易学易用性将会显著的提高模糊控制的控制品质,提高其鲁棒性并扩展其应用领域。
2 模糊PID控制系统的基本结构
为了在特定的工作条件下获得更高的控制质量(首先必须保证在恶劣工作环境中的稳定性和鲁棒性),在模糊控制设计中广泛用两种基本结构:包括上位机控制的层次结构和自适应控制。
层次控制通常包括一个通常被称为上位控制器的高阶控制器和一些低阶控制器,各层次之间的转换由模糊控制器来控制。它将整个组织系统按照一定的方式分解为若干个子系统,赋予其局部范围内的控制目标和功能,并考虑各个子系统之间的内在联系,通过协调和规定各子系统的目标、任务、利益等,使它们相互配合、相互制约,在行为目标上和整个组织的总目标协调一致,以实现组织总体最优控制。
这种结构的典型应用实例之一就是用来对感应电机进行高精度监控的多层模糊控制器(MLFC)[7],该控制器分两层,第一层是执行层,由众多辅助控制器构成,第二层是管理层,作用是协调各辅助控制器使之联合实现系统总目标,由于使用了多层拓扑结构,整个控制器的设计变得简单易行。
低阶控制器一般使用传统的PID控制器(如图1),这样高阶的模糊控制器就可以根据下层的参数调节需要制定相应的模糊规则从而直接进行操作,模糊控制器可以对参数进行在线和离线的调节,这意味着模糊控制器可以和传统PID控制器同步工作。在某些案例中,使用模糊控制只是用来预防控制过程中可能出现的一些危险情况。

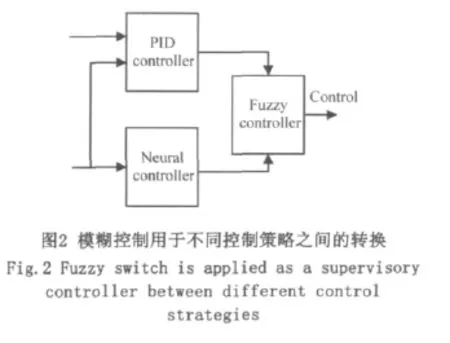
新兴的有自动学习功能的模糊神经网络控制可以实现各个PID控制器之间的暂态和稳态切换操作。在这种结构的控制器中,PD控制一般用在大偏差情况下以加快响应速度,而PI控制一般用在小偏差情况下以消除静差。在控制算法中,S型神经元可以在系统结构改变时进行预赋值运算,同时依照实际情况自动改变控制参数,用以构建控制器参数和实际操作条件之间的非线性关系,可以利用传感器技术将基于专家的经验数据转换为数值数据,再利用神经网络的有效学习算法,从这些数据中学习控制规则和隶属函数,从而弥补模糊控制的缺点,并较好解决系统稳态误差和快速性之间的矛盾。在某些情况下,将模糊控制用于PID控制和神经网络控制之间的转换(如图2)[8]。
在Palm和Rdhfuess做的一项对于模糊控制和PID控制相似性的研究中,将模糊控制器视为了一种近似增益调节器,模糊增益调节器通过权衡不同隶属函数和相应计算的中值建立模糊规则,另一方面,PID增益系数和模糊控制缩放因子之间的这种相似性可以用在模糊控制器的设计和整定中[9]。
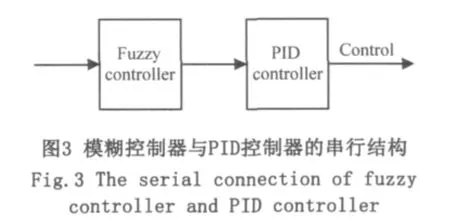
另一种将模糊神经网络PID结合起来的方法就是在同一层次同时放置模糊、神经网络和PID控制器,在一个串行连接中,模糊控制器同时接收PID控制器的输入信号(如图3)。在大多数情况下,基于专家控制的模糊控制可以代替人工操作,这种控制方式由Tzafestas和Papanikolopoulos等提出并已被广泛采用[10]。在另一种并行结构中,模糊控制器接受偏差信号并给PID控制器提供输入信号,或者一个传统控制器的输入被模糊控制取代(如图4),这种结构对于非线性设备控制及具有较强干扰的工作场所控制效果较好。

上述的模糊控制结构在大量的工程实践中被证明是行之有效的,能够满足控制系统需要的稳定性以及快速性等性能,同传统PID控制相比具有适应性强、鲁棒性高、纠错能力强等诸多优点[11]。
3 结语
当前一些研究成果表明,神经网络技术模糊控制技术的结合,是模糊控制的一个重要发展趋势,而模糊逻辑、专家系统、神经网络以及正在引起国际广泛关注的混沌控制这些当代智能技术的新四部正在互相渗透、紧密结合,将是促进高度智能化模糊研究的关键。
[1] L X WANG.A supervisory controller for fuzzy control systems that guarantees stability[J] .IEEE Transactions on Automatic Control,1994,39(9):1845 -1847.
[2] LEE C C.Fuzzy logic in control systems:fuzzy logic controller[J] .IEEE Transactions on Systems,Man,and Cyber netics,1990,20(2):404 - 435.
[3] MUDI R K,PAL N T.A robust self-tuning schee for PI- and PD - type fuzzy controllers[J] .IEEE Transactions on Fuzzy Systems,1999,7(1):2-16.
[4] BREHM T,RATTAN K S.Hybrid fuzzy logic PID controller.Proceedings[A] .National Aerospace and Electronics Conference[C] .New York,1993(2):807 -813.
[5] VERBRUGGEN H B,BRUIJN P M.Fuzzy control and conventional control:what is(and can be)the real contribution of fuzzy systems?[J] .Fuzzy sets and systems,1997(90):151-160.
[6] CARPENTER G A,GROSSBERG S.Learning,categorization,rule formulation,and prediction by fuzzy neural networks.Chen,C.H.(Ed.)[A] .Fuzzy logic and Neural Network Handbook[C] .New York,1996.
[7] HUANG T C,E1-SHARKAWI M A.High performance speed and position tracking of inuction motors using multi- layer fuzzy control[J] .IEEE Transactions on Energy Conversion,1996,11(2):353-358.
[8] CAVALCANTI J H F.Intelligent control system using PID and neural controllers[A] .Proceedings of 38th Midwest Syosium on Circuits and Systems[C] .New York,1996(1):425 -428.
[9] PALM R,REHFUESS U.Fuzzy controller as gain scheduling approximators[J] .Fuzzy Sets and Systems,1995,85:233-246.
[10] TZAFESTAS S,PAPANIKOLOPOULOS N.Incremental fuzzy expert PID control[J] .IEEE.Transactions on Industrial Electronics,1990,37:365 -371.
[11] 葛新成,胡永霞.模糊控制的现状与发展概述[J] .现代防御技术,2008,36(3):51 -55.
