小型堆垛机器人货叉装置的动力学分析
2012-10-16文怀兴赵庆富
文怀兴,赵庆富
(陕西科技大学,西安 710021)
0 引言
堆垛机器人是自动仓库的关键设备,而货叉装置是堆垛机器人的工作装置,其安装在堆垛机机器人的载货台上,随载货台沿立柱轨道上下升降抵达指定货位。货叉装置横向伸缩,完成对两侧货格内货物的存取工作。由于工作需要,堆垛机器人货叉在收回状态下的长度要小于巷道的宽度,但伸展后的长度却要大于巷道宽度。为了在保证货叉能够顺利存取货物,并能满足结构紧凑和上述宽度要求,货叉一般采用3级直线差动机构 [1,2]。
1 货叉原理与结构
货叉采用齿轮齿条差动伸缩装置,实现行程倍增[3]。货叉结构原理简图如图1所示:主动齿轮6固定在中叉板7上,齿条4固定在下叉板1上,下叉板固定在载货台上,中叉板通过滑轨和滚轮轴承2与下叉板连接,上叉板8通过滑轨和滚轮轴承3与中叉板连接;当齿轮6转动时,使得中叉板7在齿轮6带动下相对于下叉板1伸出;而从动齿条5固定在上叉板8上,当齿轮6运动时,由相对运动原理可知,齿条5将带动上叉板8以2倍于中叉板7的速度相对于下叉板1伸出,从而实现了上叉板相对于中叉板的行程倍增,满足了货叉工作要求。

图1 货叉结构原理简图
2 有限元模型的建立
货叉主要构件的材料属性:弹性模量:206Gpa;泊松比:0.3;密度:7800kg/m3。其他构件的材料(如轴承等)均根据相应强度要求选择。
货叉其结构复杂,在建立有限元模型的过程中必须对其进行相应的简化:删除模型中的倒角、倒圆、直径较小的螺纹孔和小孔,压缩小于5mm的凸台[4],同时删除与分析过程无关或对分析过程影响较小的齿轮、轴承座等零部件。从而保证了在提高软件分析效率的同时,减小由于网格划分过程中出现不符合分析要求的坏的单元,而影响分析结果精度。
货叉网格划分过程,网格形式采用自动控制方法对货叉主体构件进行网格划分;在满足计算精度前提下,单元尺寸由程序控制;最终生成62511个有限元单元。对下叉底面施加固定约束,使其满足货叉实际工作情况。货叉有限元模型如图2所示。
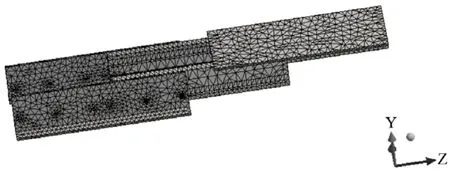
图2 货叉有限元模型
3 模态分析
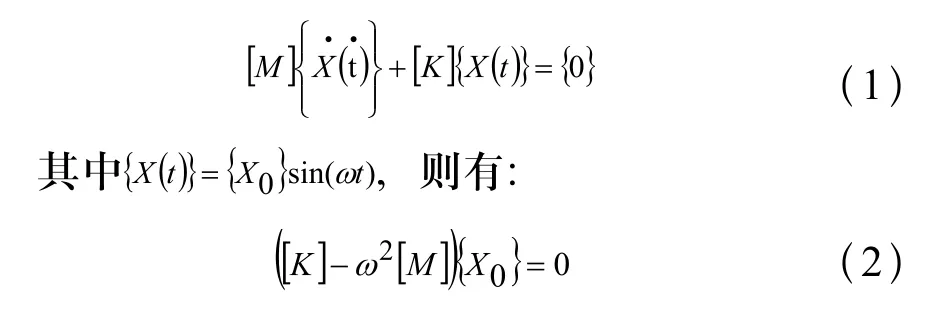
货叉模态分析是用来确定货叉装置本身的固有频率和振型,其不考虑在动载荷作用下的结构响应。对无阻尼自由振动,其动力学方程为:
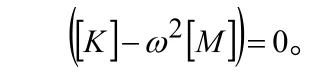
由于此小型堆垛机器人货叉伸缩过程的工作频率较低,在0Hz~40Hz之间,所以使用Ansys workbench对货叉的前6阶模态进行求解,得出货叉模态分析结果如表1所示。
表1 堆垛机器人货叉前6阶模态
由表1分析结果可知货叉的固有频率远大于货叉工作时的振动频率。由于有限元建模过程中的简化使得所建立货叉有限元模型的质量较实际货叉的质量略小,致使分析结果的固有频率略大,但仍可保证实际模型的固有频率远大于货叉的工作频率,这就保证货叉在实际工作过程中不会出现共振现象。根据货叉固有频率远大于货叉工作频率,在此仅给出货叉1、2阶振型图,如图3(a)、(b)所示。
由模态分析可知货叉在自由振动时,其振型主要为上叉板与下叉板沿相应轴的弯曲或扭曲变形,因此可以通过对上叉板与下叉板相应部位的合理布筋,来加强其刚度。
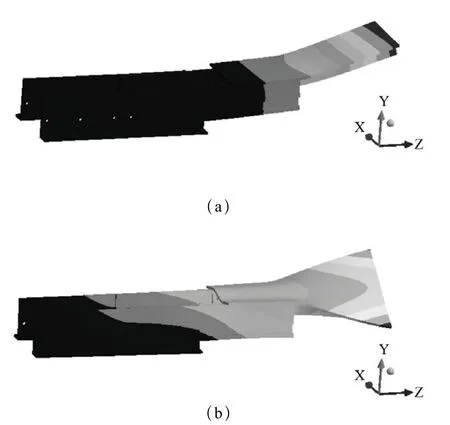
图3 货叉1、2阶模态振型
4 谐响应分析
货叉在工作过程中,在齿轮齿条驱动下,将会受到周期性变化的交变载荷作用。为确保货叉工作性能稳定,对货叉装置进行谐响应分析是非常重要的。其通用运动方程为:

式(3)中载荷矩阵[F]和位移矩阵{u}是简谐的,
ω为频率、ψ为载荷函数的相位角,得出谐响应分析的运动方程为:

由此便可进行谐响应分析与求解,得出相应频率对应的位移。
根据模态分析结果和货叉实际工作频率,取谐响应分析的扫描频率范围为0~300Hz,频率点步长取10。由货叉的实际工作情况得,对上叉板施加最大值为98N的正弦作用力。谐响应节点位移图如图4(a)、(b)所示,其分别对应33Hz、172.45Hz的节点位移。其中33Hz为货叉实际工作频率中心。

图4 谐响应节点位移图
从分析结果中,可得到无论是在货叉工作频率下,还是在货叉固有频率172.45Hz下工作,货叉的最大变形量均小于0.15mm,远小于许用值1mm,满足设计要求。在货叉固有频率工作时货叉变形趋势与模态分析变形趋势符合,说明小型堆垛机器人由于其货叉载货量小,其振动变形主要取决于货叉本身属性,外载荷对其影响很小。
由上述模态分析与谐响应分析可得到,货叉最大位移总发生在端面节点处。选取货叉各端面节点,取频率响应时最大位移点,绘制货叉端面节点最大位移频率响应曲线如图5所示。
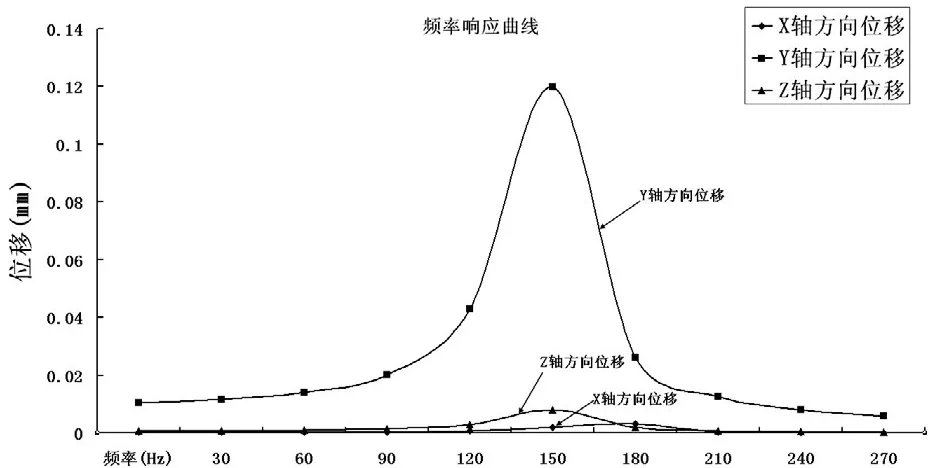
图5 端面节点最大位移频率响应曲线
从图5中可以得到Y向与Z向最大位移均发生在160Hz左右,Z向最大位移发生在180Hz左右,其均接近于货叉的1阶固有频率172.45Hz,即货叉发生共振的频率,与实际情况相符合。而此小型堆垛机器人货叉工作频率中心为33Hz,远离共振频率,所以可保证振动对其工作性能影响很小。
5 结论
通过模态分析得到三级直线差动小型堆垛机器人货叉的固有频率与振型,为货叉装置的设计提供参考,同时也为后续货叉装置动力学分析提供了必要的参数。通过谐响应分析得到货叉在实际工作中精确的振动特性参数,从理论上得到了货叉装置的动态特性,为货叉装置的减震提供依据。此次分析为小型堆垛机器人实际生产制造提供了理论依据,也为相类似装置的设计制造提供了一种有效的设计分析方法。
[1]张晓川.现代仓储物流技术与装备[M].北京: 化学工业出版社, 2003.
[2]刘昌祺.物流配送中心设施及设备设计[M].北京: 机械工业出版社, 2004.
[3]梁睦.堆垛机3层货叉直线差动机构的设计[J].起重运输机械, 2005, (3): 32-33.
[4]陈桂平, 文桂林, 崔中.高速磨床床身结构动态分析与优化[J].制造技术与机床, 2009, (2): 19-23.
[5]刘延柱, 陈文良, 陈立群.振动力学[M].北京: 高等教育出版社, 1998.
