高性能PMSM矢量控制系统设计与实现
2012-10-16张永春
张永春
(常州工学院 电子信息与电气工程学院,常州 213002)
0 引言
电机作为电能与机械能的能量转换装置,在工业、农业、交通运输以及日常生活中都发挥着重要作用,其中永磁同步电机(PMSM)具有结构简单、功率密度高、损耗小、效率高和控制性能好的特点,在各行业生产和日常生活等方面获得了广泛应用[1,2]。为了获得良好的调速特性,在高性能永磁同步电机控制中,一般需要转子的位置和速度信号,传统方法是在轴上安装传感器检测转子的位置和速度,这些装置不仅增加了系统的成本,还使电机的整体尺寸和转动惯量增大,降低了系统的可靠性,从而使PMSM在一些领域的应用受到限制。随着控制理论的发展及各种专用电动机控制芯片的不断出现,利用调速系统中电压、电流等有关电信号,通过适当方法计算出PMSM转子的位置及速度信号,构成高性能无传感器PMSM调速系统成为电机控制领域的研究热点[3,4]。
1 矢量控制系统原理
1.1 坐标变换及PMSM数学模型
电动机的速度控制实际上是通过控制转矩来实现的,永磁同步电机矢量控制系统具有高精度、高动态性能和宽范围的调速特性,受到国内外学者的重视。与永磁直流电动机不同,永磁同步电动机的电枢反应磁动势与永磁磁场不正交,因此难以通过控制电枢电流来调节电动机的转矩[5]。为实现矢量控制,应将PMSM等效成直流电动机物理模型,然后按照直流电动机的调速方法进行控制,因此需要依据合成磁动势等效原则和功率不变原则进行坐标变换。在PMSM矢量控制系统中,利用Clark变换、Park变换分别实现三相静止坐标系ABC到两相静止坐标系αβ的变换,两相静止坐标系αβ到两相旋转坐标系dq的变换,Clark变换、Park变换如下。
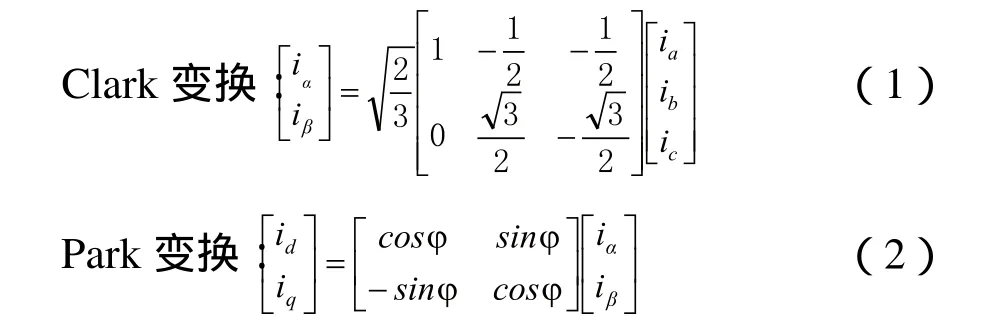
式中: ia、ib、 ic—三相静止坐标系下电流矢量;
iα、iβ—两相静止坐标系下电流矢量;
id、iq—两相旋转坐标系下电流矢量。
在磁路不饱和且空间磁场按正弦分布、三相电流对称、不计磁滞和涡流损耗等假设条件下,经过Clark变换和Park变换后,可得到dq坐标系下PMSM的数学模型如下:

式中:ud、uq、id、iq为定子 d、q轴电压、电流;
ψd、ψq为定子d、q轴磁链;
Ld、Lq为定子绕组d、q轴电感;
ψf为转子永磁体基波磁场在定子绕组中产生的磁场;
p为转子极对数;
Te为电磁转矩;
r为定子绕组相电阻;
w为角频率。
1.2 PMSM矢量控制系统组成
矢量控制是目前PMSM高性能控制的主要方法,其基本思想是通过空间矢量坐标变换及磁场定向的方法,将PMSM转换成类似于直流电动机的等效模型来进行控制,本质上属于一种解耦控制[6]。如前所述,在构成传统PMSM矢量控制系统时,需要用传感器检测转子位置、速度信号而导致系统性能下降,因此利用信息重构技术发展起来的无位置传感器矢量控制系统是目前的研究重点。由前面电磁转矩方程表达式可知,当p、ψf、Ld、Lq等参数确定后,电动机的转矩由id、iq决定。因此通过控制id、iq即可实现转矩控制,进而控制PMSM的转速。对于表面式永磁同步电动机,Ld与Lq相同,另id=0,则通过控制iq即可实现PMSM转速调节。
图1为无位置传感器PMSM矢量控制系统原理图,在控制方法上采用电压空间矢量PWM(SVPWM)控制技术。系统中整流滤波模块、智能功率模块连同PMSM共同构成系统的主电路,利用单电阻对主电路的总线电流采样后进行重构可得到逆变器的三相输出电流ia、ib、 ic,经CLARK变换后实现三相静止坐标系到两相静止坐标系的电流矢量变换,得到αβ坐标系下电流矢量iα、iβ。iα、iβ经PARK变换后得到两相同步旋转坐标系下的等效电流矢量id、iq,将其作为反馈值与给定值i d*、iq*比较后作为电流调节器的输入信号,电流调节器输出控制量为dq坐标系下电压矢量,为实现SVPWM控制,需要得到αβ坐标系下的电压控制矢量uα和uβ,系统中PARK逆变换完成该功能。由PARK变换矩阵的正交性,根据线性代数知识可知PARK逆变换矩阵可由PARK变换矩阵转置得到。
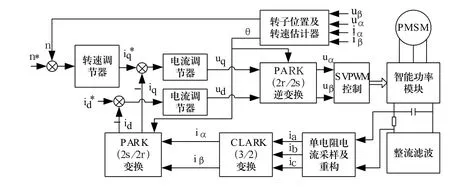
图1 无位置传感器PMSM矢量控制系统原理图
2 系统硬件设计
2.1 核心控制器及功率模块
高性能的控制芯片是实现无位置传感器PMSM矢量控制的基础,通过对比不同控制芯片的运算能力、存储空间、抗扰性能等特点,本系统设计时采用了IR公司推出的IRMCF341来实现PMSM的矢量控制。与传统单片机或DSP不同,IRMCF341内部集成了16位的电机控制引擎(MCE)和高速8位8051微处理器。MCE包含了所有的电机控制要素、电机外设、专有的运动控制时序发生器及用于数据交换的双端口RAM。工作时8051可通过双端口RAM向MCE的写寄存器组发送控制信息,或读取MCE的读寄存器组的相应状态信息。软件方面,IRMCF341不需要编写电机控制程序,其内部嵌入了磁场定向控制(FOC)算法和弱磁控制算法,用户可以通过专用的图形编译器在MALTAB/Simulink环境下以搭积木的方式构建自己的电机控制系统。此外,用户还能灵活的通过8051编程来实现时序控制、用户接口、主机通讯以及上层控制任务等系统实际需要的功能。
逆变器作为PMSM的供电环节,其性能直接影响PMSM调速系统的可靠运行。为了提高系统整体的可靠性并简化电路结构,本系统的逆变器采用了IR公司生产的IRAMX20UP60A型集成功率模块。该智能功率模块(IPM)集成度较高,其内部集成了6只N型IGBT和一个前置驱动芯片IR2136,额定开关频率达到20kHz,输出能力为20A/600V。由于该IPM在组件布局上做了优化和内部屏蔽,在使用时可有效缩短布线长度,因此具有良好的抗电磁干扰性能,使系统的整体可靠性得到提高。此外,该模块的内部还集成了温度检测功能模块,方便了系统保护环节的设计。
2.2 系统硬件构成
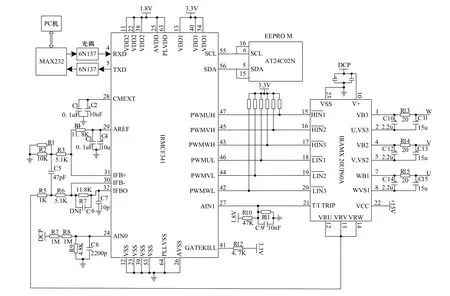
图2 系统的硬件电路结构
如图2所示为系统的硬件结构原理图。IRMCF341的42~47引脚为输出引脚,在该电路中用于产生6路PWM门极信号,在实际使用时需外接上拉电阻。分别与IRAMX20UP60A的15~20引脚相连,并通过IRAMX20UP60A内部集成的前置驱动芯片IR2136产生三相桥式逆变器中6只IGBT所需的驱动信号。T/ITRIP为驱动芯片IR2136的温度/电流保护管脚,与IRMCF341的模拟输入通道AIN1相连,实现温度/电流信号的实时检测及保护。为便于存储程序以及用户调试、修改,本系统设计时选用了2K的串行电可擦除程序存储器AT24C02N,通过IRMCF341的55引脚和56引脚可完成AT24C02N的程序写入、擦除功能。
由无位置传感器PMSM矢量控制系统工作原理分析可知,为实现PMSM的矢量控制,必须得到精确的电动机相电流ia、ib、 ic,即逆变器的三相输出电流,经变换后得到闭环控制所需的电流反馈量。此外,PMSM矢量控制系统所需的转速和转子位置也需要利用精确的电流信息进行估算,可见准确的电流检测至关重要。IRMCF341芯片内部具有一套专有的模数混合电路,用于实现单电阻电流采样以及电机电流重构算法,简化系统设计的同时又能降低系统成本,具体接线方法见图2。IRAMX20UP60A的12~14引脚为逆变器的直流负母线,通过采样电阻与IRMCF341内部电流检测运算放大器的输入(IFB+、IFB-)、输出(IFBO)相连,参考电压由AREF引脚提供。IRMCF341完成电机的电流采样后进行重构可以得到电机相电流信息ia、ib、 ic,并通过反电势积分的方法估算出转子位置和转速,以实现PMSM的矢量控制。另外,系统利用MAX232和光电隔离器6N137实现IRMCF341与PC机的通讯功能,方便了系统的开发与调试。
3 系统软件设计
IRMCF341不需要用户编写电机控制算法程序,只需要编写配置电机控制参数、正反转设定、跟踪采样、电机启动/停止、升降速等子程序,因此软件设计比较简单,系统软件调试流程如图3所示。软件开发时,首先要对IRMCF341内部寄存器组、电机控制相关的各寄存器组、电流取样寄存器组等多组寄存器进行参数配置,该项工作可借助IR公司提供的电机调试软件MCE Wizard和MCE Designer完成。对于某一台具体的电动机,可以通过实验、计算等方法获取矢量控制系统所需的信息,将这些信息逐一添加到MCE Wizard提供的对应窗口中,计算后可以得到各寄存器所需的参数值,将参数值导入MCE Designer的寄存器中后,在MCE Designer环境下调试系统。调试过程中会出现系统运行性能不理想的情况,这时需要根据电机的实际运行情况、采样信息以及MCE Designer波形窗口中的波形特点重新调整参数,直至获得满意的运行特性。MCE Designer环境下电机能够按照实际需要稳定运行后,即可围绕MCE控制进行电机控制时序、电机驱动及其他辅助功能的8051代码实现。
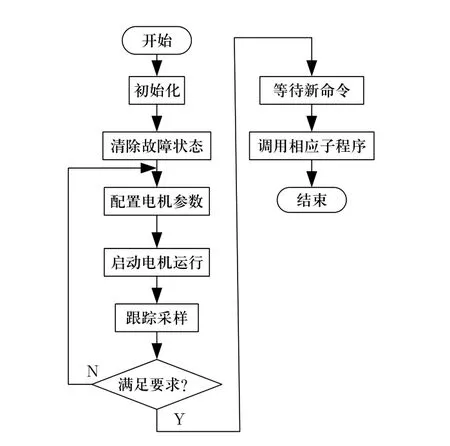
图3 系统调试流程图
4 系统实验
实验时选用的PMSM参数为:额定功率为3kW,额定转速3000r/min,额定电流10A。通过实验、计算后得到PMSM矢量控制系统所需的配置参数,主要包括总线电压:300V;过压水平:360V;低压水平:240V;高压保护:360V;极对数:8;定子电阻:0.2Ω;Q轴相电感:0.0014H;D轴相电感:0.0008;反电势常数Ke:55.66V·min/kr;力矩常数Kt:1.68N·m/A;转动惯量:0.003kg·m2;最大转速:4000 r/min;最小转速:300 r/min;加速度:300rpm/s;减速度:300rpm/s;保护电流:100%;启动电流:100%;速度调整宽度:5rad/s;速度反馈时间常数:7ms;电流再生带宽:1500rad/s;锁相环带宽:600rad/s;不稳定时间估计值:0.015s;启动闭环临界转速:150r/min;停车电流:25%;停车时间:2s;第一步停车角度:90°;第二步停车角度:120°;三相到两相门限降速:30%;三相到两相门限升速:20%;三相最小脉冲宽度:2μs;两相最小脉冲宽度:2μs。上述参数配置完成后启动电机运行,图4、图5分别为示波器观测到的采样电阻动态波形和总线电压动态波形图。根据实验过程中电机的实际运行特性及示波器的观测结果,通过调节滤波器截止频率、电流环带宽、速度环带宽等控制参数,系统获得了良好的运行特性。

图4 采样电阻动态波形

图5 总线电压动态波形
5 结束语
以IRMCF341为核心控制器,与智能功率模块IRAMX20UP60A组成无传感器PMSM矢量控制系统,不仅简化了系统结构,并且使系统的可靠性得以提高。IRMCF341内部嵌入的FOC算法和弱磁控制算法以及MCE Designer调试环境方便了用户软件设计、调试,缩短了开发周期。实验结构表明,对于某一台具体的PMSM,通过参数配置与调整,本系统能够获得良好的运行特性。
[1]汤晓燕.电机控制系统核心芯片的比较[J].沙洲职业工学院学报, 2008, 3: 8-11.
[2]王春民, 嵇艳鞠, 栾卉, 等.MATLAB/SIMULINK永磁同步电机矢量控制系统仿真[J].吉林大学学报(信息科学版), 2009, 1: 17-22.
[3]席惠, 马立华, 宗剑.基于IRMCF341的永磁同步电机无传感器矢量控制系统设计[J].电机与控制应用, 2010, 9:41-46.
[4]王军刚, 杜坤梅, 李文娟, 等.应用IRMCF341的无位置传感器PMSM控制系统的研究[J].黑龙江水专学报, 2007,3: 68-70.
[5]王秀和, 等.永磁电机(第2版)[M].北京: 中国电力出版社, 2011: 290-310.
[6]夏燕兰.永磁同步电动机PMSM矢量控制系统的研究[J].电气技术, 2008, 12: 33-35.
