基于ZigBee无线通信技术在智能交通控制系统中的应用研究
2012-10-13张健,郑春
张 健,郑 春
(安徽三联学院 计算机科学与技术系,安徽 合肥 230601)
基于ZigBee无线通信技术在智能交通控制系统中的应用研究
张 健,郑 春
(安徽三联学院 计算机科学与技术系,安徽 合肥 230601)
随着城市的发展和道路的建设,道路交通运输变得愈加的繁忙.特别是汽车数量的迅速增长,进一步加大了城市交通的压力.为了缓解当前城市交通的压力,保证道路交通的顺畅,最有效的方法就是通过交通信号灯来合理地调配车辆的运行.传统的交通信号灯只能进行设定的模式切换,而本文介绍了除了完成交通信号灯的基本功能之外,还可以做到对当前道路的事实情况采集,通过ZigBee网络传送到主模块进行分析,使用智能的优化算法,来产生合理的交通信号配时方案,帮助管理部门和车辆更了解所处的路况环境,以便进行最合理的道路管理和道路选择,提高道路运输的效率[1,2].
ZigBee无线网络;传感器;智能交通
随着经济的发展和社会的进步,城市人口增多,汽车的数量持续增加,交通拥挤和堵塞现象日趋严重,由此引发的环境噪声、大气污染、能源消耗等已经成为现在全球各工业发达国家和发展中国家面临的严峻问题.智能交通系统(IIS,intelligent transportation system)作为近十年大规模兴起的改善交通堵塞减缓交通拥挤的有效技术措施,越来越受到国内外政府决策部门和专家学者的重视,在许多国家和地区也开始了广泛的应用[5].
在我国,普遍将交通控制和出行诱导作为现今城市交通的两大重要管理手段,即先进的交通管理系统ATMS(Advanced Traffic Management System)和先进的出行者信息系统 ATIS(Advanced TraveleRinformation System).其中ATMS用于检测控制和管理公路交通,并在道路、车辆和驾驶员之间提供通信联系;ATIS依靠先进的交通检测技术和计算机处理技术,获取有关交通状况的信息,并进行处理,及时向道路使用者发出诱导信号,从而达到有效管理交通的目的.目前交通信号的检测与控制普遍采用由交通信号控制器集成并共享通信链路的方式.信号机的智能程度(传感器类型和数目、路口控制算法、远程通信能力)与可靠性直接影响到城市的交通的通行能力和智能交通系统的整体功能[4,8].
1 Zigbee技术特点
1.1 低功耗
在低耗电待机模式下,2节5号干电池可支持1个节点工作6~24个月,甚至更长.这是ZigBee的突出优势.
1.2 低成本
通过大幅简化协议(不到蓝牙的1/10),降低了对通信控制器的要求,按预测分析,以8051的8位微控制器测算,全功能的主节点需要32KB代码,子功能节点少至4KB代码,而且ZigBee免协议专利费.每块芯片的价格大约为2美元.
1.3 低速率
ZigBee工作在20~250kbps的较低速率,分别提供250kbps(2.4GHz)、40kbps(915MHz)和 20kbps(868MHz)的原始数据吞吐率,满足低速率传输数据的应用需求.
1.4 近距离
传输范围一般介于10~100m之间,在增加RF发射功率后,亦可增加到1~3km.这指的是相邻节点间的距离.如果通过路由和节点间通信的接力,传输距离将可以更远.
1.5 短时延
ZigBee的响应速度较快,一般从睡眠转入工作状态只需15ms,节点连接进入网络只需30ms,进一步节省了电能.相比较,蓝牙需要3~10s、WiFi需要3s.
1.6 高容量
ZigBee可采用星状、片状和网状网络结构,由一个主节点管理若干子节点,最多一个主节点可管理254个子节点;同时主节点还可由上一层网络节点管理,最多可组成65000个节点的大网.
1.7 高安全
ZigBee提供了三级安全模式,包括无安全设定、使用接入控制清单(ACL)防止非法获取数据以及采用高级加密标准(AES 128)的对称密码,以灵活确定其安全属性.
2 利用ZigBee技术对本系统进行组网
利用ZigBee近距离、低复杂度、自组织、低功耗、低数据速率、低成本的特点,对交通道路的信号灯系统进行组网,如图1所示.

图1 ZigBee组网拓扑结构
检测节点的传感器检测到汽车数量与到达的时间戳后,将数据以广播的方式传递给子节点,子节点与主控制器通信,然后将数据在主控节点中进行处理,得到下一时段的配时方案,再由主控制器以广播的方式控制和协调子节点交通灯的时长.
3 系统硬件设计
3.1 信号机主控端模块
主控制模块通过ZigBee无线网络接收子模块传递的信息,并对这些信息进行分析、计算,得出下一时刻得配时方案,同时对子模块进行初始化操作,设计思路如图2所示.

图2 主控制器设计思路
主控制器的作用体现在两个方面:
一是作为硬件和软件系统的交互中转站,通过ZigBee无线网络接收子模块传递的车辆实时信息,作为分析数据的输入参数,并且主模块的算法分析,将控制命令无线下发给子模块以设置其工作状态.
二是作为控制核心,完成实时信息存储、全局时钟同步等功能.
3.2 车流量信息采集模块
在进入十字路口的每条车道上,分别放置两个传感器,检测车流量与每辆车到达的时间戳,并将检测到的数据通过ZigBee网络发送到主控制器中.
车辆检测模块使用加速度传感器和磁传感器.磁传感器用于检测车辆经过的数量,加速度传感器用于唤醒磁传感器.磁传感器并不是始终处于工作状态,而是在有车辆经过时才开始工作.
当有车辆到来时,加速度传感器检测到有车辆靠近,此时它会发出信号唤醒磁传感器,此时,磁传感器将车辆通过路面时对于地磁的扰动转换为电信号,经过运放调理电路的放大、滤波和处理,变为能够识别的标准的TTL电平信号,MCU通过比较扰动的强弱来判断车辆是否到达,同时通过无线网络上报给主控制模块[9].
3.3 紧急干预模块
在系统中加载遥控电路,以支持用红外遥控器作紧急干预.采用8通道红外发射/接收专用集成电路BA5104/BA5204,它能发射6个持续信号2个单次信号,串行口接入方便,且价格低,稳定性强.红外接收端与信号机控制板总线相连,可以将遥控器按键信号传递至信号机主控端进行中断处理,且优先级最高.
3.4 故障检测模块
交通信号灯工作环境较为复杂,可能存在各种难以预测的电源、电磁干扰及信号机自身的随机性障碍.为了保证系统的可靠运行,除了采用软件对策外,专门引入了硬件看门狗复位电路MAX708CPA,该器件具有μP复位、掉电监测、手动复位等功能,可以起到较好的保护作用.此外,利用含有电压检测与电流检测的故障检测电路,对信号灯控制器和信号灯作出实时检测,将返回的TTL电平信号传递至信号机主控板,信号机系统可以根据不同的结果选择继续执行,或者向上报警,甚至自行关机[5,8].
3.5 信号灯控制器模块
信号灯控制器是信号机与信号灯之间必需的硬件连接.路口信号灯的各种灯色状态是由信号灯控制器对信号机数据进行处理转化而成的.
3.6 地区联动模块
本地信号灯系统与地区信号灯系统管理端采用局域网络(LAN)进行双向通讯.本地信号机控制端将待处理的数据信息通过Web Service应用程序接口封装好发给地区信号灯系统控制端,处理工作由后者完成,再把最终结果返回给本地信号机.Web Service技术充分利用地区信号灯系统控制单元的计算能力,减轻了本地信号机的处理器开销,使得信号灯系统更加稳定和易于维护.
4 软件实现
本系统采用广播的方式,设定固定的频段作为各子模块和主模块的频段,数据帧中加入校验位,由子模块不断地进行信息的发送,主模块进行检测.当校验位与设定频段相同,则加入网络,连接建立,如图3所示.
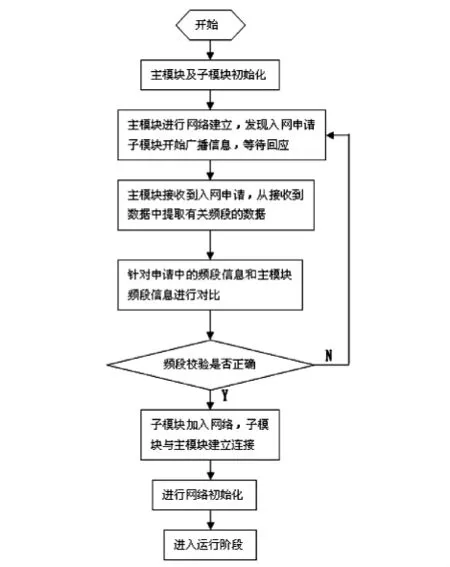
图3 组网流程图
交通信号灯系统程序可分为以下几个模块[1,3,4]:
(1)信号机主程序模块是整个系统的主要模块,它按优先级利用其它模块的执行结果,生成当前信号灯周期.
(2)定时控制程序模块支持通过键盘输入固定的时间数值,改变当前所执行的信号灯周期,以人工经验与系统相结合,体现出人机交互能力.
(3)定时调节程序模块是针对已经形成一定路况规律的路段而设置的.可以一次性预先设定每天不同时段对应不同的信号灯周期.比如,晚上车流量较少,可做定时调节将红绿灯改成闪烁的黄灯,当第二天指定时刻到来时,自动恢复红绿灯.
黄闪警告程序模块可以立刻中断所有的红绿灯,全部改成闪烁黄灯.主要是在车流量很小的时段使用,可以提高通行效率.
(4)遥控强置程序模块是为交警现场指挥交通而设计的,只需用遥控器对红外接收端按下特定的按钮,就可以对现场的信号灯相位全部强制重置,特别适用于单向塞车车流的调节和像救护车救火车这样需要无障碍通行的交通工具快速通过路口.
联动处理程序模块是用来处理上位机(交警联动中心控制机)所发来的指令.信号灯联网以后,整个区域的交通路口就可以进行协调联动控制,如果一个路口发生拥堵,联动中心可以发来指令,适当延长相邻路口信号灯来车方向的通行时间,有效疏导交通.
(5)“看门狗”程序模块在主程序运行异常时可产生的一个溢出信号,并通过引脚向处理器发送复位信号,使主程序重新开始运行.
(6)系统检测及报警程序模块是应对信号灯故障而设置的,它根据返回的TTL电平信号作出判断,一旦发现问题,将把出错信息实时向上反映,为进一步的系统维护提供依据.
5 小结
目前,在理论设计中所使用的传感器已经能够达到所需的灵敏度与检测距离的要求,并且可以稳定的工作.并具有数据采集、处理、显示等基本功能.但由于巨磁阻传感器灵敏度较高,为了使其能够在更加复杂的环境下稳定工作,进一步扩大传感器的应用范围,还需要对传感器的结构及电路进行改进以改善检测距离和稳定性等性能.并且可以进行进一步的智能化设计,提供更加方便的智能化系统,使交通状况变得越来越好.
〔1〕Arno Hinberger,Horst Wieker,Gerd Regelnut h,et al.Benefit s and technology of an intelligent road side unit systeMFor vehicle to infrastructure2and infrastructure to centre communication [J].Transportation Research Part C 10,2006(10):186-192.
〔2〕曹元军,周志成,徐伟,等.基于无线传感器网络的交通信号灯控制[J].计算机与信息技术,2008(3).
〔3〕崔维新,梁光胜.智能信号灯控制系统的设计[J].现代电子技术,2006,20(235):22-24.
〔4〕齐楠,韩波,李平.智能交通系统中无线传感器网络的应用[J].机电工程,2007(10).
〔5〕徐程,董德存,朱健,黄承.智能交通系统中的无线通信技术.同济大学交通信息工程及控制研究所.
〔6〕李野,王晶波,董利波.物联网在智能交通中的应用研究[J].移动通信,2010(15):30-34.
〔7〕叶加圣.基于FCD技术的道路交通信息采集与交通动态诱导系统[D].合肥工业大学硕士学位论文,2009.
〔8〕陈宇峰,向郑涛,陈利.智能交通系统中的交通信息采集技术研究进展.湖北汽车工业学院学报,2010,24(2):30-36.
〔9〕Zhang J P,Chen D W,Krger U.Adaptive constraint k-segment principal curves foRintelligent transportation systems.IEEE Transactions on Intelligent transportation systems,2008,9(4):666-677.
TN929.5
A
1673-260X(2012)05-0045-03
安徽三联学院2012年度院级自然科学研究项目2012010“网络技术实验室的网络安全研究”,项目编号:
