车载激光点云领域比较的道路边线提取方法
2012-09-28崔希民袁德宝王立鸿
王 果,崔希民,袁德宝,张 强,王立鸿
(1.中国矿业大学(北京)地球科学与测绘工程学院,北京100083;2.北京东方道迩信息技术有限责任公司,北京100080)
车载激光点云领域比较的道路边线提取方法
王 果1,崔希民1,袁德宝1,张 强1,王立鸿2
(1.中国矿业大学(北京)地球科学与测绘工程学院,北京100083;2.北京东方道迩信息技术有限责任公司,北京100080)
对车载激光扫描获取的高速公路信息进行研究,提出直接利用三维激光点云数据的平面和高程信息,通过点云与其邻域比较进行道路边线提取的方法。该方法提取不需要其他辅助数据,能直接从点云中自动提取出道路边线信息,对点云数据自动提取具有一定借鉴意义。
激光扫描;点云;道路边线;提取;VC++
一、引 言
三维空间信息的快速获取及其自动处理技术是地球空间信息科学和空间信息产业快速发展的前提。激光LiDAR技术作为一种新的空间数据采集手段,具有全天候、作业周期短、精度高等优点,能快速获取海量的高精度三维坐标数据。最近10多年来,激光扫描测量系统作为快速、精确获取地面三维数据的测绘工具已经得到广泛认同。从1998年开始,激光测绘系统使用量以每年25%的速度增长。加拿大Optech公司的ALTM、瑞士徕卡公司的ALSSO、德国IGI公司的LiteMapper、瑞典Topo-EyeAB公司的TopEye以及法国TopoSys公司的Falcon II等系统是当前比较成熟的商业应用系统。
按照激光扫描设备搭载的平台,通常将激光扫描测量系统分为机载激光扫描测量系统(air-borne laser scanning system,ALSS;或airborne laser terrain mapper,ALTM)、地面扫描测量系统(ground-based laser scanning system,GLSS)和车载激光扫描测量系统(vehicle-borne laser scanning system,VLSS)。
经过十几年的发展,机载激光LiDAR技术已相对成熟,车载激光LiDAR系统硬件的开发和研究也有了较大的进展,而对于激光扫描数据的处理却相对滞后,到目前为止,尚没有距离点云分割成熟可行的方法[1]。现有文献中,文献[1]提出基于投影点密度的车载激光扫描数据处理方法;文献[2]提出一种格网化的车载激光点云提取方法;文献[3]将所有数据点投影到格网上,根据每个格网单元投影前后高度最大值对格网数据进行分类,提取出建筑物特征;文献[4]介绍了一种基于建筑物几何特征,对建筑物的平面轮廓信息进行提取,并对其三维建模和可视化的方法;文献[5]研究了基于车载激光测距的建筑物立面信息提取;文献[6]借鉴了投影点密度的思想,提出了一套从车载激光扫描数据中提取和重建窗户的方案;文献[7]利用扫描线上的公路三维信息进行提取,取得了一定效果。上述文献,大都是针对建筑物的相关信息进行提取,很少有关于道路方面提取的文献。文献[8]中指出,如果按照机载激光的方法利用点云数据生成DSM,然后从DSM进行相关信息提取,就会丢失一些信息,从而导致提取精度降低。本文主要通过研究利用高速公路自身的形态特征,并利用点云与其邻域比较的思想,从车载激光点云数据中提取道路边线信息的方法。
二、邻域比较原理
1.基于k-d树的点云邻域
1975年由J.L.Bentley提出的k-d树,是k(k≥2)维二叉检索树(BST),它主要用于所有索引多属性的数据或多维数据点。与二叉检索树有所不同,k维空间的点是通过k-d树的结点表示,并且树的每一层都会根据该层的分辨器(discriminator)做出相应的分枝决策。k-d树的第i层分辨器定义如下:i对k取余,即imodk,其中树的根结点所在层为0,根结点的孩子所在层为1;其他同理,依次递增[9]。
点云数据为散乱数据点,即对于每个数据点只包含点的三维坐标值,而其对应的几何拓扑信息并没有给出。因此,需要根据空间点的邻域关系估算点对应的拓扑关系,从而估算点对应的几何信息(如数据点单位法向量、微切平面、曲率大小和邻接关系)。二维或三维散乱点云数据中,某点Q的k个最临近邻域是指在数据集S={Pi(i=1,2,3,…,n)}中找到k个与该点欧式距离最近的点的集合。若Λ是一排列,Λ满足

则某点Q的k邻域为

k-d树是二叉检索树的扩展,k表示空间维数,故又称k维搜索树,其示意图如图1所示。在每个内部节点中,用一个k-1维与坐标轴平行的超平面(如二维空间中的线)将节点所表示的k维空间分成两个部分,存储在子树中的点大约一半落入一侧,而另一半落入另一侧。当一个节点中的点数少于给定的最大点数时,划分结束。这些超平面在k个可能的方向上交替出现,每个超平面中至少包括一个数据点,这就保证了k-d树不存在“无点空间”的浪费。当有n个点时,构造k-d树的时间复杂度为0[9]。
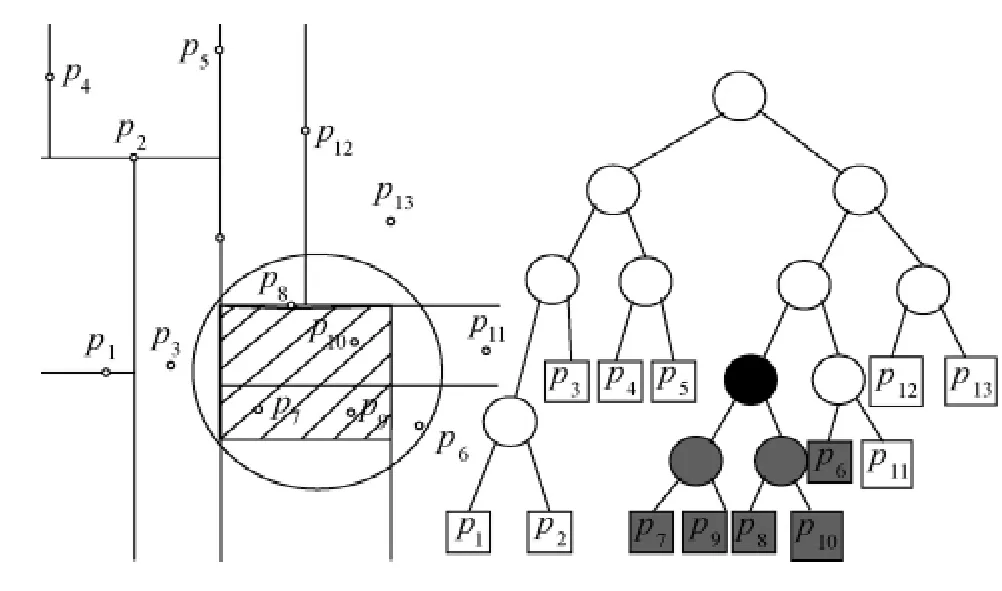
图1 点云的k-近域搜索
与格网数据有所不同,空间散乱的三维激光点云数据无附加的拓扑信息。为了获取激光脚点的拓扑信息需要定义散乱脚点的局部邻域,常用的邻域方式有ε-邻域和k-邻域。所谓ε-邻域,就是以当前查询的激光脚点为中心,半径为ε的球体内所有激光脚点定义为该采样脚点的邻域脚点,该方式比较适合于比较规则的采样表面;而对于k-邻域来说,是指离散的空间点云中与查询点欧氏距离最近的k个点所组成的点的集合,这种方式比较适合于非规则采样的点云数据。根据激光扫描数据的特点,选取k-邻域进行相应的道路边线提取。
2.邻域比较方法
从车载激光扫描的距离图像(如图2所示)可看出,反射自高速公路地面的数据点信息基本排列在水平面上,反射自树和杆状地物的数据点成离散分布状态。同时,反射自地面上地物的数据点在高程方面比反射自地面上的大,而且,高速公路路面具有比较平坦的特点。如果按照4%的坡度计算,车载激光点云点间隔按2 cm计算,相邻点间的高差为0.02×4%=0.000 8 m,即0.8 mm,所以路面点之间的高程差别很小。基于高速公路激光点云数据的以上特性,可利用激光脚点与周围邻域点的高程进行比较,从而提取所关注的信息。

图2 车载激光扫描高速公路距离图像
三、试验过程及结果
1.试验过程
选取某高速公路的车载激光点云数据作为试验数据,该数据为一段长5 km的高速公路数据,通过分块处理,将5 km数据25块,每块数据长度为200 m,分别对25块数据进行处理。对于路面数据,如果k-邻域中有k/2个点高程值与当前查询点Q的高程值之差小于2 cm,则把该查询点的分类信息写入las文件;对于路沿石和其他非地面数据,若Q为当前查询点,A为Q的其中一个最临近邻域,B为Q正上方或者正下方和A有相同高程值的点,对于Q周围的k邻近,记录向量QA和向量QB的夹角在某个阈值范围内的邻近点个数m,如果m大于一定的条件,则将非地面信息的分类,写入las文件。试验发现,对于非地面点如果将k设为大于20,可明显将路沿石分离出来。
通过las文件,将default类的点读入,对于default类的某点Q,如果Q的k-邻域中既有路面点又有非路面点,而且这k-邻域中的路面点和查询点的距离小于0.02 m,则将该查询点的类信息写入las文件。遍历default类的所有点即可将路面和路沿石之间的点成功分离。
遍历las文件中的路面和路沿石之间点,如果某点k-邻域中既有路面和路沿石之间点又有路面点,而且这k-领域中的路面点和查询点的距离小于0.01 m,则将该查询点的类信息写入las文件。通过这种方法,可将道路边线点成功分类。
上述分类方法通过VC++环境下编写代码予以实现,整个道路边线试验提取流程如图3所示。
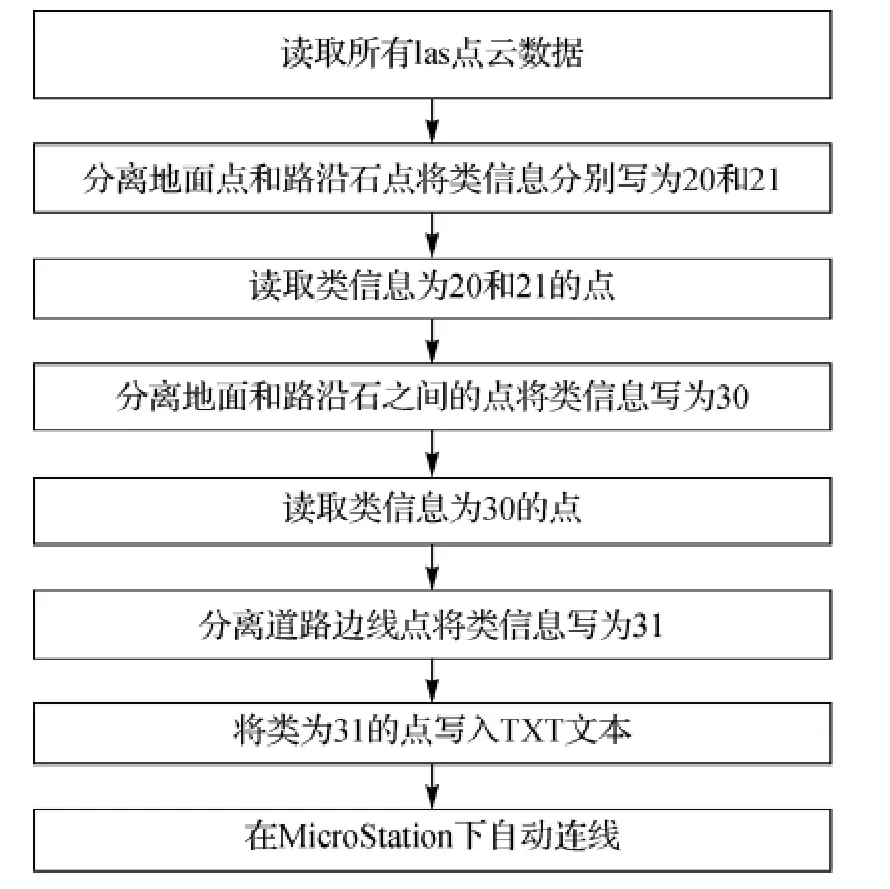
图3 试验流程
2.试验结果
对于每一块数据,按照设计的分类算法,首先分离出地面点和路沿石点,将其类信息分别写为20和21,对于未分类点,即类信息为1的点,建立k-d树,通过设计的算法分离出路面和路沿石之间的点,将其类信息写为30;其次遍历类为30的点,建立k-d树,分类出道路边线点,将其类信息写为31;然后将类为31的所有点的坐标信息,写入文本文件;最后将TXT文本导入MicroStation实现离散点自动连线,结果如图4所示。
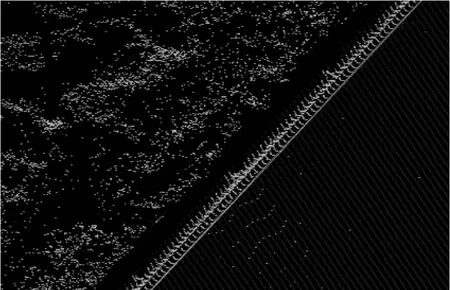
图4 道路边线提取效果
四、结束语
根据高速公路道路边线自身的特点及公路在车载激光扫描据表达中的特点,运用邻域比较的方法,对原始未分类的点云不断进行邻域比较,并按照设计的算法利用VC++9.0编写代码,不断分类出高速公路道路边线点,然后在MicroStation下将滤出的离散点自动连线,实现基于车载激光点云道路边线的提取。该方法不仅可以减少内业大量的人力劳动,而且基于点云直接进行分类,不会出现人工提取过程中“飞点”的情况,自动化程度高,可减少人工提取时出错的几率。试验结果表明,其能相对快速地从车载激光点云中提取出高速公路道路边线以及所关心的信息。
[1] 史文中,李必军,李清泉.基于投影点密度的车载激光扫描距离图像分割方法[J].测绘学报,2005,34(2):95-100.
[2] 卢秀山,黄磊.基于激光扫描数据的建筑物信息格网化提取方法[J].武汉大学学报:信息科学版,2007,32(10):852-855.
[3] 吴芬芳,李清泉,熊卿.基于车载激光扫描数据的目标分类方法[J].测绘科学,2007,32(4):75-77.
[4] 李必军,方志祥,任娟.从激光扫描数据中进行建筑物特征提取研究[J]武汉大学学报:信息科学版,2003,28(1):65-70.
[5] 王健,靳奉祥,吕海彦,等.基于车载激光测距的建筑物立面信息提取[J].山东科技大学:自然科学版,2003,23(4):8-11.
[6] 杨洋,马一薇,杨靖宇.基于车载激光扫描技术的窗户提取与重建技术[J].海洋测绘,2010,30(3):48-51.
[7] 李永强,盛业华,刘会云,等.基于车载激光扫描的公路三维信息提取[J].测绘科学,2008,33(4):23-25.
[8] ASELSSON P.Processing of Laser Scanner Data:Algorithm and Applications[J].ISRPS Journal of Photogrametry and Remote Sensing,1999,54:138-147.
[9] 郭薇,郭菁,胡志勇.空间数据库索引技术[M].上海:上海交通大学出版社,2006.
[10] SITHOLE G,VOSSELMAN G.Experimental Comparison ofFilterAlgorithmsforBare-Earth Extraction from Airborne Laser Scanning Point Clouds[J].ISPRS Journal ofPhotogrammetry and Remote Sensing,2004,59:85-101.
Method of Extraction of Highway Sideline from Point Cloud of Mobile Scanning System
WANG Guo,CUI Ximin,YUAN Debao,ZHANG Qiang,WANG Lihong
0494-0911(2012)09-0055-03
P234.5
B
2011-09-14
王 果(1986—),男,河南南阳人,博士生,主要研究方向为测绘新技术及数据处理。