基于可信度计算的分布式共识合作感知算法
2012-09-28安阳,高瞻
安 阳,高 瞻
(解放军理工大学通信工程学院,南京210007)
1 引 言
随着无线通信技术的迅猛发展,无线频谱资源愈加紧张,然而许多重要的频段已经被无线电频谱管理部门授权用户占用。随之而来,认知无线电技术被提出[1]。该技术能有效地解决无线频谱资源紧张的问题。认知无线电技术是指非授权用户(以下简称认知用户)通过感知一定时间、一定区域内授权用户(以下简称主用户)的频谱占用信息,寻求利用已分配给授权用户、但未被使用的频谱资源,从而提高无线频谱的利用率[2-3]。
因此,认知无线电技术的前提是:感知用户应避免对主用户造成干扰,或者使其干扰低于主用户干扰容忍度的门限。这就要求感知用户保证良好的感知性能,感知性能的好坏一般采用虚警率和漏检率两个评价标准,虚警率较大将导致感知用户搜寻可用频谱的效率低下,漏检率较大将导致对主用户的干扰几率大大增加。由于现实频谱环境中存在多径效应、阴影衰落的影响,特别是对于隐终端问题[4-5],单个感知用户的性能表现不甚理想,因此合作感知的方法正被广泛研究[6-7]。合作感知的网络架构有分布式和中心融合式两种[8],其中分布式结构无中心融合节点,网络简单、自组织性强,分布式结构中的各邻居节点一般通过交互信息实现合作共享。本文从节点交互的有效性出发,对一种基于共识的节点信息交互策略[9]进行了研究,提出基于可信度的共识合作算法。各节点通过对各邻居节点的可信度进行计算,从而决定是否与其合作以及合作交互的程度,以有效规避恶意节点,以及其他不可靠节点对周围节点的影响,避免错误信息在网络中交叉传播,从而保证有效的整体感知性能。
2 系统模型
2.1 本地感知用户检测模型
认知无线电的频谱感知问题一般可用二元假设检验表示:H0代表频谱可用,H1代表频谱不可用,公式表示如下:

式中,y(n)代表认知用户的检测信号,x(n)代表主用户信号,w(n)代表加性高斯白噪声,h(n)代表主用户到感知用户的信道衰落因子。本文认知用户采用能量检测[10]的方法进行本地感知,认知用户i的检测量M用如下公式表示:

式中,u=TW代表时间带宽积,感知用户通过将检测能量值与阈值 λ比较进而得出本地判决结果D,判决公式如下:
2.2 基于共识的合作感知检测模型
在分布式认知网络架构下,其各用户之间的相邻关系如图1所示。在该网络结构下,采用一种基于共识的合作感知检测模型[9]如下:

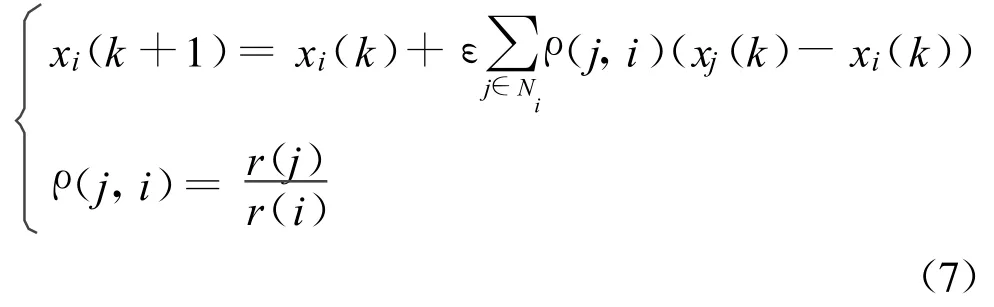
其中:

式中,Δ代表网络的最大自由度,xi(k)代表节点 i在第k步的检测结果,Ni代表节点i的邻居集合,ε代表迭代系数。通过多次迭代,单个节点的感知结果为

其中,x*近似聚合为一个常数。
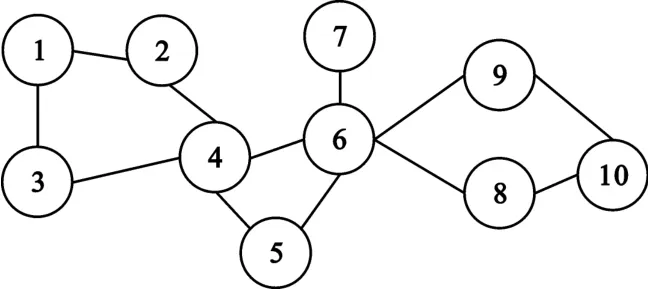
图1 包含10个感知用户的网络拓扑图Fig.1 Network topology with 10 CR nodes
3 基于可信度计算的共识合作感知算法
3.1 可信度计算
与中心式感知网络不同的融合中心存在,文中节点的可信度计算将由邻居节点完成。首先,各感知节点通过本地感知,获取感知结果,然后相邻节点之间进行感知结果的交互,并进行感知结果的比较。感知结果的比较可采取似然比的方式,也可以采取差值比较的方式,文中用差值结果进行表示:

式中,fij(k)为 i节点对j节点的差值比较结果,当两者差值大于阈值 γ时,比较结果为1,代表两者差异较大,否则视为相似。某节点的可信度判决不仅仅由一个邻居节点决定,其周围节点都有对其进行可信度计算的权利,并将可信度值交互给其他邻居节点,因此某节点的最终可信度值将由多节点共同计算得出,其量化判决累加公式如下:

式中,P是一个常数,代表每个节点的最初可信度,n代表节点i的邻居节点数目,经过邻居节点计算后,得出节点i的累加可信度r(i),当 r(i)小于一个阈值时,节点i即被置为不可信节点,则其邻居节点不再与其交互信息;对于r值在阈值之上时,则该节点将被邻居节点认可,并根据 r值大小进行不同程度的信息交互。
3.2 基于可信度的共识合作
各节点根据其可信度值,被赋予不同的交互权限,可信度越高,则被交互的程度越深,这种基于可信度的共识合作算法用数学公式可表示为
在邻居节点信息交互的过程中,可信度值高的节点将占据交互的优势地位,这样使交互结果偏向于可信度值高的节点,从而使最终感知结果趋向于可信度高的感知结果,即在合作感知的过程中赋予可信度高的节点高的权重。综上所述,算法流程图如图2所示。

图2 基于可信度共识合作的算法流程图Fig.2 The flowchart of scheme based on reputation consensus cooperation
3.3 改进算法收敛性分析
在共识合作感知算法中,收敛性是一个衡量性能的重要指标,收敛时间的长短将直接影响感知效率的高低。经过研究发现,恶意节点产生的严重偏差将导致收敛速度的降低,对此我们给出以下证明:
假设t时刻,感知网络中i节点和j节点的观测值分别为 xi(t)、xj(t),并假设 xi(t)>xj(t)>x*,x*为如模型[9]所述的聚合值,由公式(4)我们可以得到:

因此公式(8)可进一步表述为

在算法参数ε的调整过程中,因为ε>0.5时,由 xi(t+1)=ε xi(t)+(1-ε)xj(t)可知,xi(t)对xi(t+1)的贡献数值将小于 xj(t),这是不合理的,因此我们一般采取ε<0.5,文献[9]中对0.1<ε<0.2的情况进行了分析。
由公式(9),我们可得在xi(t)>xj(t)>x*的情况下,xi(t+1)>xj(t+1)>x*,直到 xi(t)※x*,xj(t)※x*as k※∞,因此我们可得出如下结论:xi(t)将迟于 xj(t)收敛到 x*,即 xi(t)的收敛时间将大于 xj(t)。即全局网络节点的观测值全部收敛到 x*所需的时间,将取决于最大偏离观测值的节点,这可以表示为

通常情况下,恶意节点为了混淆甚至破坏网络的感知过程,其发送给邻居节点的观测值将远远偏离实际观测值,因此上文所述的最大偏离观测值通常由恶意节点产生,这就导致了网络全局收敛时间的增大。对此,我们在仿真中将给与验证,在恶意节点存在的感知网络中,给出基于可信度机制的收敛性能曲线,并与未采用改进机制的性能进行比较[3]。
4 仿真验证
为了验证本文所提算法的性能,从算法仿真的ROC曲线出发,将基于可信度的共识算法与OR判决算法、共识算法进行比较。在分布式网络架构下,首先验证不存在恶意节点的场景下共识算法相对普通OR判决的优劣,其后验证存在恶意节点的不可靠场景下,基于可信度的共识算法对共识算法性能的提升,最后对两种算法的迭代时间进行比较。文中本地感知采用能量感知[10]方法,分布式共识算法采用文献[7]中的算法。
假设在某一区域内分布有1个授权主用户、10个认知用户,主用户出现与否的概率均为0.5,其中10个认知用户中存在2个不可信用户,可假设其感知结果严重偏离正确值,具体表示可用较低的本地低信噪比值表征,这里我们假设不可信用户的信噪比介于3~5 dB,正常认知用户的信噪比介于8~12 dB之间,仿真环境为瑞利衰落,仿真次数为100 000次,共识交互的迭代次数为100次,算法参数ε设置为0.02。
图3为不存在不可信用户时,共识算法与OR判决准则的性能比较。从图3可以看出,在无恶意节点存在的场景下,共识算法相对普通的OR判决算法实现了较大的性能提升。然而在恶意节点存在的场景下,相对无恶意节点的场景下,共识算法的性能曲线显著下降,如图4所示,通过采用文中所提出的基于可信度计算的共识合作算法,感知性能得到了一定程度的提升,这在一定程度上减轻了恶意点对整体感知性能的影响。

图3 共识算法与OR判决的性能比较Fig.3 Performance of the existing consensus scheme and the OR-rule decision
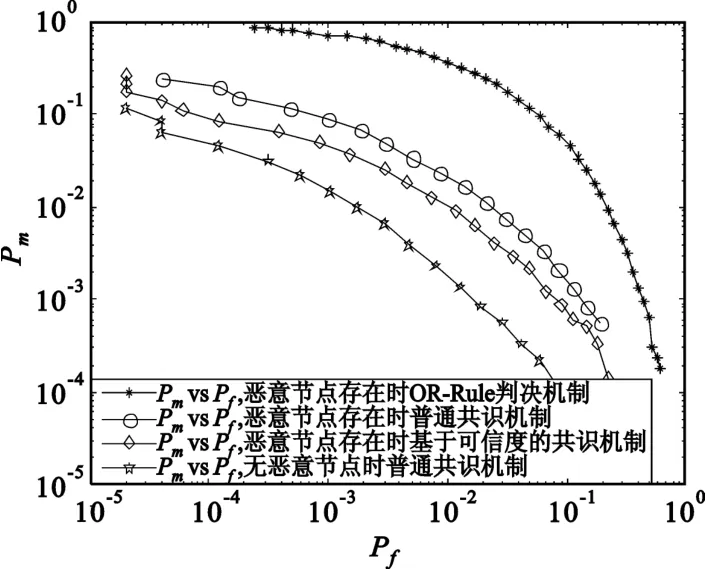
图4 基于可信度计算的共识算法与已有算法性能比较Fig.4 Performance comparison of the common consensus schemes and the proposed scheme
从图5可以看出,在恶意节点存在的情况下,本文所提算法的收敛时间将小于已有算法,这是由于在发送的能量感知结果中,恶意节点产生的严重偏离值,在收敛的过程中延缓了收敛速度,即延长了整个网络的收敛时间。本文所提算法在一定程度上规避了恶意节点产生的偏离值影响,因此收敛速度相对已有算法较快。

图5 存在恶意节点场景下已有算法与所提算法收敛时间比较Fig.5 Convergence comparison between the proposed scheme and the common consensus scheme in the scene with malicious users
5 结束语
本文在深入研究分布式网络架构下共识合作算法的基础上,针对恶意节点存在的分布式网络场景下,提出一种基于可信度计算的共识合作算法,并从感知性能和收敛时间两个方面进行了仿真验证。仿真结果证明:在无恶意节点存在的场景下,该算法提升了感知性能,减少了迭代时间,在一定程度上减轻了恶意节点对网络整体感知性能的影响;然而对于复杂大规模的网络场景,可信度的计算过程将更加复杂,关于可信度计算的复杂度问题还有待研究。
[1]MitolaJ,Maguire G Q.Cognitive radio:making software radiosMore personal[J].IEEE Persional Communications,1999,6(4):13-18.
[2]Haykin S.Cognitive Radio:Brain-improved Wire-less Communications[J].IEEE Journal onSelectedArea in Communications,2005,23(2):201-220.
[3]Mitola J.Cognitive radio architecture evolution[J].Proceedings of IEEE,2009,97(4):626-641.
[4]Ghasemi A,Sousa E S.Collaborative spectrum sensing for Opportunistic accessin fading environments[C]//Proceeding of 2005 IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks.Baltimore,USA:IEEE,2005:131-136.
[5]Mishra S M,Sahai A,Brodersen R.Cooperative sensing among Cognitive radios[C]//Proceeding of 2006 IEEE International Conferenceon Communications.Turkey:IEEE,2006:1658-1663.
[6]Ghasemi A,Sousa ES.Asymptotic Performance of Collaborative spectrum sensing under Correlated Log-Normal Shadowing[J].IEEE Communications Letters,2007,11(1):34-36.
[7]GuanesanG,Ye Li.Cooperative spectrum sensing in the cognitive radio,PartⅠ:T wo User Networks[J].IEEE Transactions on Wireless Communications,2007,6(6):2204-2213.
[8]Yucek T,Arslan H.A Survey of Spectrum sensing Algorithms for Cognitive Radio application[J].IEEE Communications Surveys&Tutorials,2009,11(1):116-130.
[9]Li Zhejiang,Yu F R,Huang Minyi.A distributed consensus-based cooperative spectrum-sensing scheme in cognitive radios[J].IEEE Transactions on Vehicular Technology,2010,59(1):383-393.
[10]DighamF F,AlouiniM S,SimonM K.On the energy detection of unknown signals over fading channels[J].IEEE Transactions on Communications,2007,55(1):21-24.