一种运动控制系统专用现场总线
2012-09-28江世琳王声文
吴 超 江世琳 高 岩 李 俊 王声文
(大连光洋科技工程有限公司,辽宁大连 116600)
数字伺服装置的出现是运动控制设备发展史上一个重要的里程碑。采用数字伺服装置,使所有指令值和实际值都能在一个微控制器内完成。不但能实现传统的扭矩环和速度环控制,而且能在极短时间内完成精插补,实现位置环控制。与传统的模拟伺服装置相比,采用数字伺服装置能获得更高的加工速度和加工精度,且控制硬件简单,系统的复杂性和成本都大大降低。
伴随着数字伺服装置的发展,如何实现运动控制单元与数字伺服装置/PLC IO点之间的数据通信成为一个关键问题。必须为运动控制单元和数字伺服装置配置合适的数字接口,从而保证遵循此标准开发出的相关设备具有良好的互换性。
本文基于这种理念,设计了一种运动控制设备专用通信协议,其设计内容包括:拓扑结构、数据传输线的组成、信号编码格式、报文结构、工作时序、接口初始化、周期数据的配置和传输、伺服运行模式的设置以及故障诊断和处理。
通过对本协议内容的解析和应用,可以建立起一套基于该协议的完善的运动控制体系。
1 协议设计原理
从简化设计角度出发,本协议从物理层和数据链路层2个方面进行定义,主要内容包括:拓扑结构、数据传输线的组成、信号编码格式、报文结构、工作时序、非周期性数据传输、接口初始化、周期数据的配置和传输、伺服装置运行模式的设置以及故障诊断和处理等。
2 拓扑结构
针对运动控制系统的工作特点,本协议使用环路结构作为最基本的拓扑,环路由协议设备和传输线组成,每个环路只有1台主设备,其余都为从设备。各设备之间的物理层不做特殊定义,可采用以太网、光线,1394、USB通路介质实现,标准暂时拟定采用以太网物理层实现,数据在传输线上单向流动。
图1给出主设备(PC主机和PCI协议转换卡)和从设备(全数字总线式伺服控制器)的连接形式。1台主设备可以带多台从设备,目前设计最大可连入环路的从设备为24台,并留有可扩展余地。
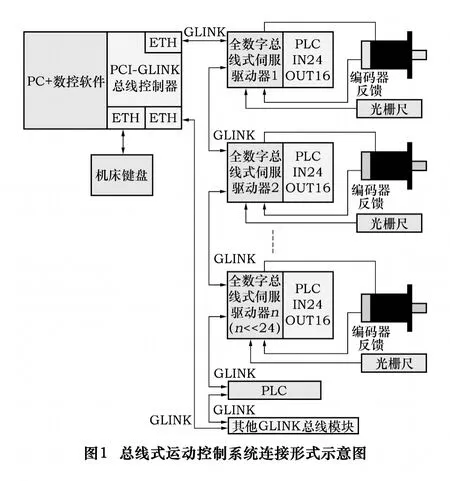
注意,虽然各台从设备之间是通过5类双绞线互联的,但是各台从设备之间不能直接进行数据通讯,从设备只能接收主设备的命令和数据以及根据相应命令作出相应的反应并返回数据。各台从设备的地址,按照链路上的连接顺序依次由低到高排列。
3 物理层
物理层位于通信系统的最低层,是整个通讯的基础,为设备之间的数据通讯提供传输媒介(电缆、光纤等)及互联设备(插头、插座等),为数据传输提供通路,负责数据传输及相关的管理工作。
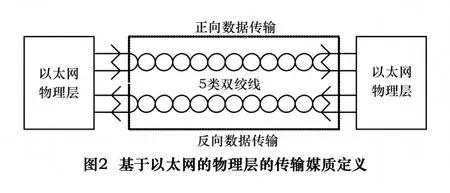
采用以太网物理层链路的传输媒质定义如图2所示。正向发送端的以太网物理层芯片,接收到上位控制芯片发送过来的标准数据,将该数据转化成串行数据进行传送。正向数据和反向数据同时发送,在从设备没有出现故障的情况下,只使用正向数据进行数据传送,当遇到断线或者其他从设备不能通信的故障时,反向数据起到回传数据,形成闭环作用,以供处理故障使用。
4 信号编码格式
与所采用的物理层传输介质和协议有关,目前支持以太网物理层、1394物理层、USB物理层。采用以太网物理层为例:在物理层完成4B-5B码制转换,5类双绞线上实现差分曼彻斯特编码传输。
5 报文基本结构
在本协议中,所有的数据都是以数据电报的形式进行传输,本章将详细介绍。
5.1 循环时序结构
由图3可以看出1个循环由2次有间隔的数据发送组成:962字节的数据帧和8字节的快速字节帧。其中,962字节的数据帧功能:主设备命令,主设备发给从设备的命令,从设备返回的数据;8字节快速字节帧的功能:主设备发送的命令和数据的同步使能。
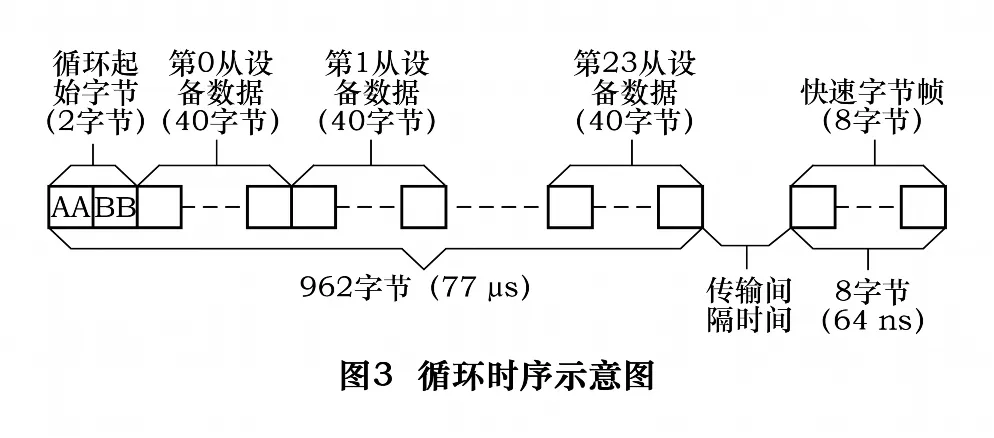
结构描述:962字节数据帧以16进制AA、BB作为起始字节,之后跟随24台从设备的命令和数据帧,每台设备分配40个字节空间。即,962=2+40×24。
5.2 从设备数据结构
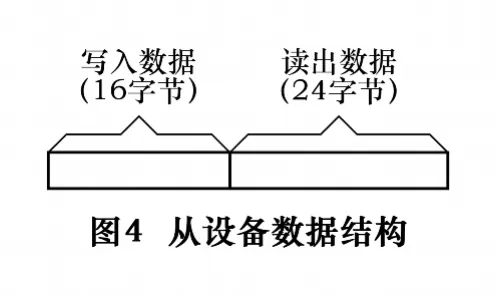
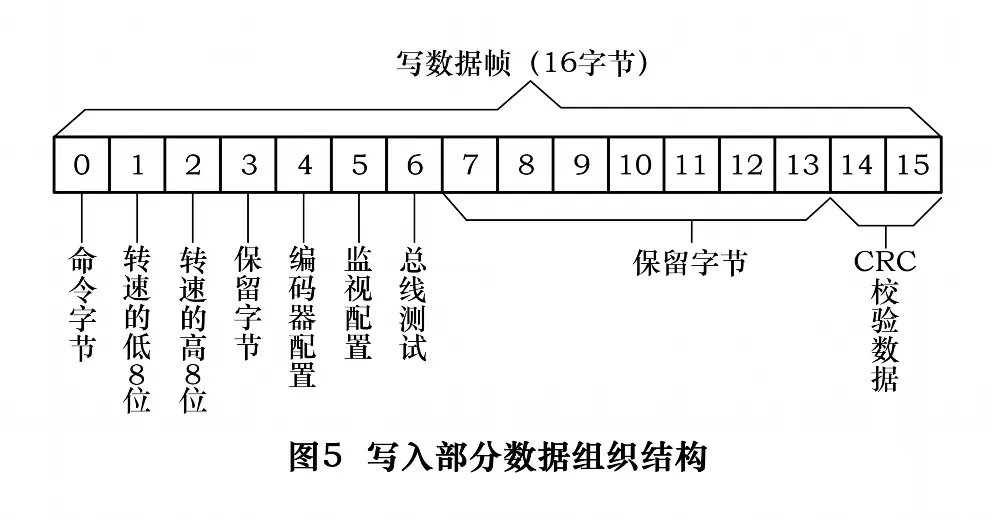
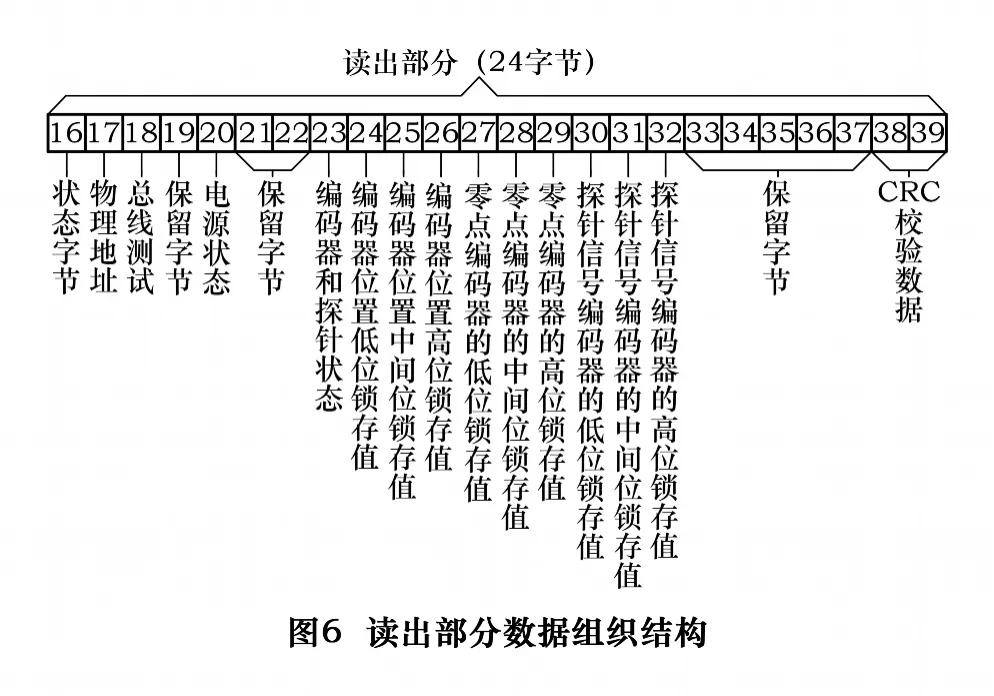
如图4所示,从设备数据共分配40字节空间,其中前16字节是来自主设备的写入数据,后24字节是返回到主设备的数据。写入数据部分数据组织结构如图5所示,读出部分数据组织结构如图6所示。
6 接口初始化和从设备配置
上电后所有从设备的基地址都将置为F8H。
为了避免地址冲突,所有从设备以环形形式连接,也就是说配置前上位机只能访问第一台从设备。
配置的第一步是识别从设备,上位机访问第一台从设备,若上位机读取了正确的ID码。然后上位机给该从设备重新分配基地址。配置后该从设备释放IDOUT信号,在上个基地址基础上为下1台从设备开始配置。
7 工作时序
图3所示为1个循环的时序结构。数据帧的接收开始的头字节为16进制数据 AA和BB,然后是第零台设备的第零个字节。以第2台设备(物理地址是02)为例,在这台设备将接收到的数据转发到01个网口供下一级,当计数到2×40+2=82(52 HEX)时,开始接收(复制,但是同时转发)数据,计数到82+24=106(6A HEX)时,停止接收,开始向数据流填充数据。计数到106+24=138时,填充结束,恢复转发状态,直到数据流结束。
然后主设备发送1个8字节的快速字节帧,从设备收到这个字节帧中对应于自己位置的命令数据,锁定数据帧传过来的数据,并执行相应操作。
8 故障诊断和处理
协议定义了专门的数据位对系统电源电压异常、编码器断线、链路断路、通信数据错误、伺服装置报警和PLC报警等都有相应的检测和处理。
9 结语
本协议详细实现了一种用于运动控制系统的现场总线,具有实时、可靠、成本低以及结构灵活的特点,可有效应用于各种数控系统、柔性生产线。
[1]魏庆福.现场总线技术的发展与工业以太网综述[J].工业控制计算机,2002(1):1-5.
[2]谢经明,陈幼平,周祖德,等.SERCOS总线协议及其在数控系统中应用[J].机电一体化技术推广应用,2001(5):3-5.
[3]阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,1999.
[4]SERCOS inter face Descr iption[Z].IEC61491 and EN61491,2000.
[5]郇极,尹旭峰.基于数字伺服现场总线技术的开放式数控系统[J].中国机械工程,1999(10):1132-1134.
[6]康存锋,费仁元,陈卫福.开放式数字运动控制结构及SERCOS接口技术[J].机电产品开发与创新,2003(1):60-63.
