激光跟踪仪在摄像机标定中的应用**1
2012-09-26陈杰春赵丽萍
陈杰春 张 恒 赵丽萍
(①东北电力大学自动化工程学院,吉林吉林 132012;②东北电力大学理学院,吉林吉林 132012)
由于立体视觉测量技术具有成本低、效率高和系统组成灵活等特点,因此它在几何量测量、在线检测和反求工程等方面得到了广泛的应用。摄像机标定是实现立体视觉测量技术的关键,其标定结果的准确程度直接决定了视觉测量结果的准确程度。现有的摄像机标定方法主要有两种:传统标定方法和自标定方法。相比较而言,传统标定方法可以获得较高的精度[1]。在使用传统标定方法时,通常在摄像机的视场中放置一个标定设备,而且在标定设备的表面,往往要人为印制特定的图案(如棋盘格图案)。在标定过程中,首先使用三坐标测量机精确测量出标定设备表面上的每个控制点的三维世界坐标,然后用摄像机拍摄标定设备的图像,并使用某种图像特征检测算子提取每个控制点成像的二维图像坐标,最后再利用这些控制点的三维世界坐标和二维图像坐标求解摄像机模型公式中的未知参数[1-3]。
在摄像机视场较大的情况下,如何制作标定设备以及如何精确测量控制点的三维坐标,是应用传统标定法标定摄像机的关键问题。激光跟踪仪是一种便携式的三坐标测量机。与传统的三坐标测量机相比,激光跟踪仪具有以下特点:(1)既能实现动态测量也能实现静态测量;(2)具有较大的测量范围;(3)可获得较高的测量精度[4-5]。比如FARO公司生产的Laser Tracker Xi激光跟踪仪,其最大测量半径为35 m、三坐标的测量精度可达0.025 mm。由于激光跟踪仪具有以上特点,因此文中将探讨使用激光跟踪仪标定摄像机的方法,该方法试图解决2个问题:(1)如何使用激光跟踪仪生成控制点;(2)如何使用激光跟踪仪测量控制点的三维坐标。
1 激光跟踪仪的工作原理
图1给出了典型激光跟踪仪的原理示意图[6-7]。如图1所示,激光器发出的光束首先由分束镜1分成两部分:一部分射向角锥反射棱镜3形成参考光束;另一部分射向光束导向平面镜4形成测量光束。在两台装有高精度光电码盘的电动机的驱动下,光束导向平面镜可分别绕水平轴和垂直轴旋转。测量光束入射到光束导向平面镜的回转中心,经反射后射向位于被测点的靶标。靶标通常采用猫眼或角锥棱镜的结构形式,这两种靶标都可以使入射到靶标中心的光束沿原路返回,未入射到靶标中心的光束则平行返回。若测量光束沿原路返回,它将与参考光束汇合并生成亮暗相间的干涉条纹,由光电计数器5累计亮暗条纹变化的次数,可测量出靶标的相对位移量。如果测量光束未能沿着原路返回,它就不能与参考光束汇合,进而不能测量出靶标的相对位移量。为了保证测量光束沿着原路返回,用分束镜2从返回的测量光束中分一部分光束,并让它射向二维位置敏感探测器6的感光面。二维位置敏感探测器能够检测出返回的测量光束与原测量光束之间的偏差量,伺服控制器根据此偏差量的大小输出相应的控制信号给电动机7和8,电动机7和8带动光束导向平面镜同时绕水平轴和垂直轴旋转,直至测量光束入射到靶标中心并沿着原路返回。上述调节过程,也能保证激光跟踪仪实时跟踪靶标的位置变化,使测量光束始终入射到靶标的中心。
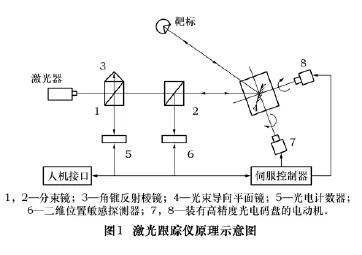
在跟踪靶标过程中,激光跟踪仪也实时测量靶标中心的三维坐标。激光跟踪仪是一个球坐标测量系统,其坐标系原点与光束导向平面镜的回转中心相固连。假设点P是靶标中心点,点P至坐标原点的距离L由干涉系统测量,点P的方位角α和俯仰角β由高精度光电码盘测量。由于干涉系统和光电码盘均为增量码测量系统,因此测量前必须预设L、α和β的初值。通常在激光跟踪仪的壳体上设置一个初始点,测量开始时,首先将靶标置于该初始点上,该点与光束导向平面镜回转中心的距离和方位角是固定且已知的,然后在此基础上分别测量L、α和β的绝对值。点P的极坐标(L,α,β)和直角坐标(x,y,z)可相互转换[8]:

2 控制点的生成及其坐标的测量
2.1 控制点的生成过程
如图2所示,用激光跟踪仪生成控制点的过程为:
(1)在激光跟踪仪的测量范围内安放1个表面平整的标定板,然后将靶标放在标定板的表面上,同时记录靶标中心点的三维坐标(X,Y,Z)。
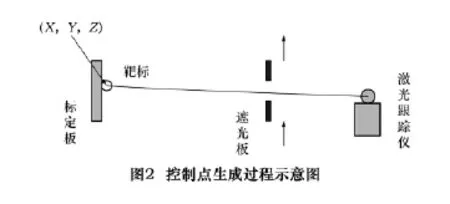
(2)在测量光束的光路上放置1个不透光的遮光板。根据激光跟踪仪的工作原理可知,此时激光跟踪仪的跟踪系统将失去作用,也就是说,若此时移动靶标,测量光束不会跟着改变方向。
(3)将靶标从标定板的表面上拿走,接着再移开遮光板。这样,激光跟踪仪的测量光束就会直接投射在标定板的表面上并形成一个指示光斑,此指示光斑就被用作标定摄像机的控制点。
2.2 标定板平面方程的确定
将靶标随机放在标定板的表面上,同时记录靶标中心点的三维直角坐标 Pi(xi,yi,zi)(i=1,2,…,n;n>3)。靶标中心点Pi分布在同一平面内,该平面与标定板平面互相平行,而且两者之间距离等于靶标半径R。
假设:标定板平面为Πb;靶标中心点所在的平面为Πc;平面Πc的方程为

将点Pi(i=1,2,…,n;n>3)的坐标值代入式(2),可构造一个超定线性方程组:
使用最小二乘法求解式(3),可以确定 A/D1、B/D1和C/D1的数值。
平面Πb和Πc的相对位置关系如图3所示,假设点Pc(xc,yc,zc)是平面 Πc内的任意一点,直线l过点Pc而且垂直于平面Πc,则直线l的参数方程可写成:


点 Pb(xb,yb,zb)是直线 l和平面 Πb的交点,由于平面Πb和Πc之间的距离等于靶标半径R,由式(4)可求得点Pb的坐标为

由于平面Πb和Πc互相平行,因此可假设平面Πb的方程为

将点Pb的坐标值代入式(6)得:

至此,确定了标定板平面方程式(6)中的所有未知参数值,即确定了标定板平面的平面方程。
2.3 控制点坐标的确定
标定板平面和激光跟踪仪测量光束之间的关系如图4所示,将测量光束看作一条经过坐标原点的直线,则靶标中心点P是该直线上的一点,直线OP的参数方程为:
式中X、Y和Z是点P的坐标分量。

结合式(6)和(8),得标定板平面Πb和直线OP的交点P′(即控制点)的坐标为
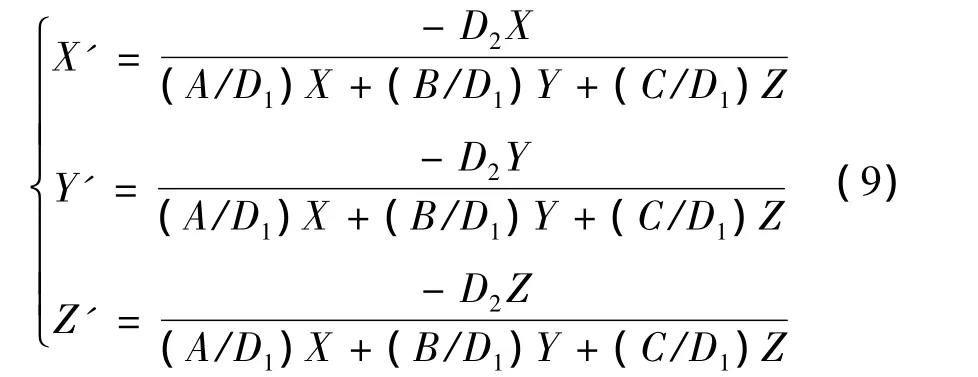
由于在生成控制点的过程中已测量出点P的三维世界坐标(X,Y,Z),因此由式(9)可求解出控制点P′的三维世界坐标(X′,Y′,Z′)。
3 实验结果
通过实验对文中提出的方法做了验证。使用FARO公司的Laser Tracker Xi激光跟踪仪在空间中生成15个控制点,同时测量出这些控制点的三维世界坐标(xi,yi,zi)。用摄像机拍摄每个控制点的图像,然后在图像中识别出控制点并计算其质心坐标(ui,vi)。表1给出了这些控制点的三维世界坐标及其成像点的二维图像坐标。
采用Tsai摄像机模型公式描述摄像机的成像过程。Tsai摄像机模型是一种被广泛采用的非线性摄像机模型,因为它不但能满足多数应用的精度要求,而且表达式也比较简单。实验中采用两步法求解Tsai摄像机模型公式中的未知参数,即首先根据摄像机成像过程的特点确定摄像机模型参数的初值,然后再利用最小二乘法确定模型参数的最优解[3]。使用表1中的数据求解Tsai摄像机模型公式中的未知参数,其结果如表2所示。
为了验证摄像机标定结果的准确性,首先使用2.1节中给出的方法生成10个指示光斑,同时测量出它们的三维世界坐标(xk,yk,zk)(k=1,2,…,10)。接着使用标定过的Tsai摄像机模型公式重构这些点目

表1 标定摄像机模型的数据

表2 摄像机标定结果


4 结语
文中探讨了使用激光跟踪仪标定摄像机的方法,该方法主要解决了2个问题:如何生成控制点;如何准确测量这些控制点的三维坐标。通过实验对该方法做了验证,实验中生成的控制点分布范围较大,由实验结果可见,该方法适合用于标定视场范围较大的摄像机,并且能够取得令人满意的测量精度。
[1]David Forcyth,Jean Ponce.计算机视觉:一种现代的方法[M].北京:清华大学出版社,2005.
[2]Salvi J,Armangué X,Batlle J.A comparative review of camera calibrating methods with accuracy evaluation[J].Pattern Recognition,2002,35(7):1617-1635.
[3]Tsai R Y.Versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Journal of Robotics and Automation,1987,RA -3(4):323-344.
[4]郭洁瑛,刘笑,王伟.激光跟踪仪水平与垂直角对测量精度影响的试验研究[J].航天器环境工程,2010,27(5):643-646.
[5]王卫军,李晓星,方程,等.激光跟踪仪在风机叶片外形测量中的应用[J].航天制造技术,2009(6):26-29.
[6]Greef G P.A study for the development of a laser tracking system utilizing multilateration for high accuracy dimensional metrology[D].Stellenbosch:University of Stellenbosch,2010.
[7]Gallagher B B.Optical shop applications for laser tracker metrology systems[D].Arizona:University of Arizona,2003.
[8]张春富,张军,唐文彦,等.激光跟踪仪在大尺寸工件几何参数测量中的应用[J].工具技术,2002,36(5):26 -28.
